Flying 3D X8 6 Axis 2.4G 8CH GPS FPV RC Quadcopter RTF

написал banggood саппорту с фото.
Полтора месяца обещали полностью корпус и опоры.
Наконец выслали.
На старый корпус пересаживать не собираюсь.
Приехал корпус (SKU: SKU160268, SKU: SKU160231, SKU: SKU160181).
Мне не нужен. Если что, имейте ввиду.
коллеги, поделитесь плз фоткой или ссылкой как правильно смонтировать подвес! Сам подвес пока не выбрал. Интересуют общие принципы, и может быть будет полезен фотоотчет. Сам ума не приложу, да и опыта не хватает…Какие-то переходники наверное нужны… Я так понял под этот аппарат конкретно подвесов нет …
Приехал корпус (SKU: SKU160268, SKU: SKU160231, SKU: SKU160181).
Мне не нужен. Если что, имейте ввиду.
а сколько весит все в сборе? в граммах в смысле. интересует вопрос - менять или не менять в будущем
а сколько весит все в сборе? в граммах в смысле. интересует вопрос - менять или не менять в будущем

Это без крышки аккумулятора SKU160298
Её я как то упустил из виду, а родная была повреждена и ушла в утиль.
Так же, без болтиков и гаек.
Сегодня вечером первый полет. Школьный стадион, ясно, почти штиль. Минут 15 искал спутники, причем первые 10 мин полный ноль, под конец-8 штук. Я понимаю, холодный старт, но не слишком ли долго? Калибровку само собой сделал. Сам полет немного сумбурный (волнение:)) время полета около 3 мин. Я пока не заменил разъем на ХТ60 поэтому мало. Подъем начал в ручном режиме и на высоте примерно 6м переключил в GPS, повисел немного, вперед-назад, влево-враво, рысканье. Потом подключил безголовый режим (АОС), и тут немного не понял поведение квадра. Он как-то неправильно реагировал на правый стик. Тяну на себя, а он летит от меня, я вправо, а он наоборот. Времени не хватило, квадр сам начал посадку, хотя аккум показывал 7.1в.
Может я неправильно включил режим АОС - левый тумблер полностью вниз, правый в среднее положение ?
Летчики, черкните что-нибудь про спутники и про АОС.
Может я неправильно включил режим АОС
Я этим режимом не пользуюсь. Безголовых бывает два режима. Один по компасу, второй по гпс. Во втором случае стик на себя - квадр к тебе(всегда). В первом поведение зависит от ориентации квадра в момент страта, положения квадра относительно пилота и фантазии программиста (те пользоваться можно, но надо помнить положение квадра на старте, знать где он находится и понимать работу режима). Если на старте(если программист не решил за точку отсчета брать момент включения режима или еще чего) был носом на север, то если стик на себя - полетит на юг, независимо от того, где он сейчас - сзади пилота или сбоку (куда смотрит нос - неважно в обоих режимах). Какой вариант у нас - не знаю.
Безголовых бывает два режима. Один по компасу, второй по гпс. Во втором случае стик на себя - квадр к тебе(всегда)
Я включил GPS (левый тумблер внизу) и АОС (правый в среднем). Ладно потом разберусь, Вячеслав, а по поиску спутников?
Я включил GPS (левый тумблер внизу) и АОС (правый в среднем)
Режим АОС выбирается в софте на компе.
Я включил GPS (левый тумблер внизу) и АОС (правый в среднем). Ладно потом разберусь, Вячеслав, а по поиску спутников?
Я не помню тумблеры (в книжке вроде есть). По Вашему описанию вроде похоже (других режимов с “неправильным” поведением стиков нет). А по спутникам завтра проверьте: если опять долго - батарейку на модуле думать надо.
Режим АОС выбирается в софте на компе.
В смысле там из двух вариантов выбрать можно?
Режим АОС выбирается в софте на компе.
Само-собой, он у меня выбран, я смотрел.
В смысле там из двух вариантов выбрать можно?
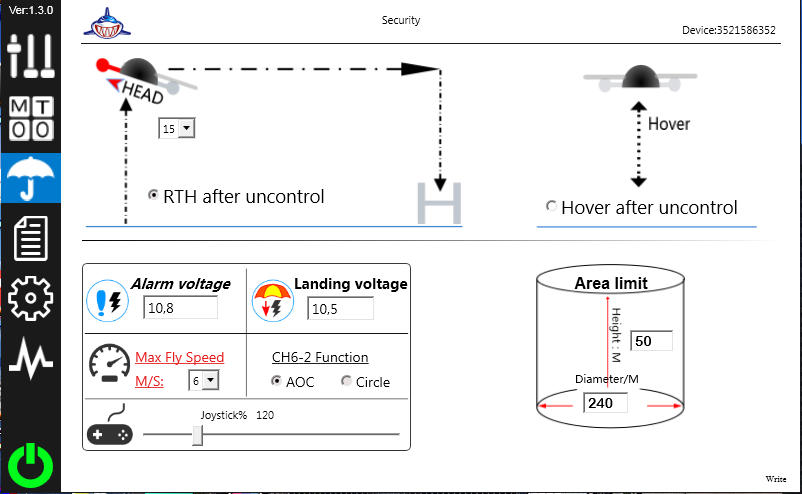
Там канал 6 можно настроить или АОС или циркуль.
Чего-то я туплю, АОС и безголовый режим- это одно и тоже?
Там канал 6 можно настроить или АОС или циркуль.
До чего я ленивый - софтина старая, прошивка тоже. И забугорный форум давно не смотрел (кстати, что там нового?)😃
А по спутникам завтра проверьте: если опять долго - батарейку на модуле думать надо.
Да, там ионистор, который можно заменить на батарейку. Я вскрывал нутро, модуль ГПС укутан, чего-то я не стал глубже копать, может позже.
И забугорный форум давно не смотрел (кстати, что там нового?)
Народ там сильно переживает, что попали они со старой прошивкой. Многие пытались сделать апдейт до 1.4 и превратили квадр в кирпич.
Безголовых бывает два режима. Один по компасу, второй по гпс. Во втором случае стик на себя - квадр к тебе(всегда). В первом поведение зависит от ориентации квадра в момент страта, положения квадра относительно пилота и фантазии программиста
У нас похоже АОС работает по компасу. Мой Х8 ведёт себя точно так как Игорь описал. Пользоваться тоже не стал. Жуть как не удобно, особенно если за спину улетишь и развернёшься 😃
Там канал 6 можно настроить или АОС или циркуль.
Циркуль интересно это что? Area limit я полагаю.
превратили квадр в кирпич.
Ну значит пусть со старой летает 😃
софтина старая
С удовольствием обнаружил в ассистенте 1.3.0 регулировку скорости полёта. А то в режиме GPS очень неспешно квадрик летает.
Циркуль интересно это что?
На АПМ это полет по кругу (типа облететь вокруг дымовой трубы носом к ней), нужен для съемок. Что тут - подразумевается - ХЗ.
Area limit я полагаю.
Это отдельно настраивается, если надо.
С удовольствием обнаружил в ассистенте 1.3.0 регулировку скорости полёта.
Теперь и обновлять страшно 😃
Жуть как не удобно, особенно если за спину улетишь и развернёшься
Надо представлять в голове “вид сверху” (картинку из гугл-глобуса, север вверху)
[QUOTE=pww2000;5654006]
Теперь и обновлять страшно 😃
Для изменения полетных параметров не надо ничего обновлять. Достаточно только установить новую версию Ассистента 1.3.0. НО НИ В КОЕМ СЛУЧАЕ НЕ ОБНОВЛЯТЬ В НЕЙ ПРОШИВКУ СВОЕГО КВАДРА!
Вот в софте выбирается какой именно будет работать режим.
Уже писали выше:
- первый режим работает по принципу - запомнить стороны при взлете и на них ориентироваться. Т.е. пока квадрик перед тобою, как им не крути, движение вперед будет движением от тебя, влево-вправо - соотвествовать лево-право для тебя. Как только квадрик залетит в область сбоку от тебя, что б полететь от себя, прийдется нажимать уже влево-вправо. Как только квадрик оказался за спиной(относительно положения при взлете), то команда вперед - и он летит на тебя.
- циркуль - это ориентирование не на стороны света, а на точку взлета. И если в этом режиме нажать вперед, он всегда будет лететь от точки взлета, с какой стороны бы он не находился…
UPD:
Вот набросал вам от руки две схемы - двух режимов.

Крестик - коптер не зависимо от поворота корпуса. Стрелочка - голова коптера в этом режиме.
По центру нарисован пилот для понимания, но в реальности это скорее место взлета - так будет правильнее.
Вот в софте выбирается какой именно будет работать режим.
Ну может и так. Я просто по АПМ привык, что циркуль - это еще один режим для облета. Надо пробовать.
циркуль - это ориентирование не на стороны света, а на точку взлета.
Вот спасибо, надо будет попробовать.
Надо представлять в голове “вид сверху” (картинку из гугл-глобуса, север вверху)
Ну тогда уж проще в ручном режиме летать 😃
Удалось подключиться к Ассистенту 1.3.0. Настройки успешно меняются и грузятся в аппарат.
Попробовал кнопку Update - выдаёт ошибку. Видимо всё так и не судьба шить новые прошивки в старый Х4 контроллер.