Flying 3D X8 6 Axis 2.4G 8CH GPS FPV RC Quadcopter RTF

Безголовых бывает два режима. Один по компасу, второй по гпс. Во втором случае стик на себя - квадр к тебе(всегда). В первом поведение зависит от ориентации квадра в момент страта, положения квадра относительно пилота и фантазии программиста
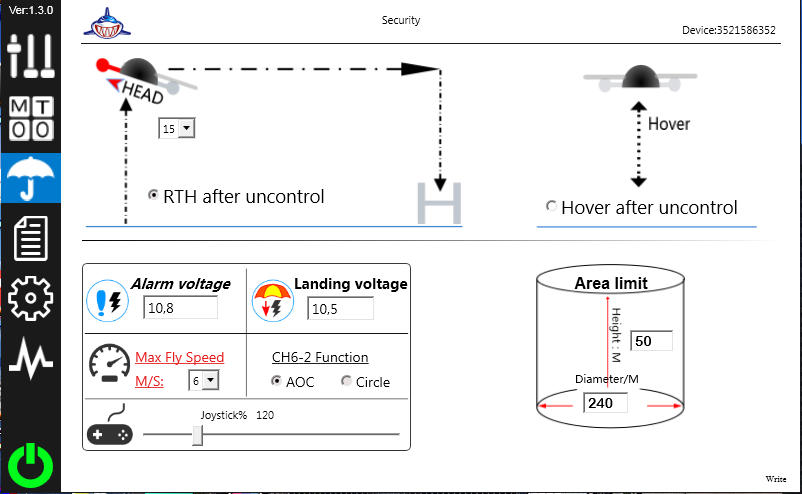
У нас похоже АОС работает по компасу. Мой Х8 ведёт себя точно так как Игорь описал. Пользоваться тоже не стал. Жуть как не удобно, особенно если за спину улетишь и развернёшься 😃
Там канал 6 можно настроить или АОС или циркуль.
Циркуль интересно это что? Area limit я полагаю.
превратили квадр в кирпич.
Ну значит пусть со старой летает 😃
софтина старая
С удовольствием обнаружил в ассистенте 1.3.0 регулировку скорости полёта. А то в режиме GPS очень неспешно квадрик летает.
Циркуль интересно это что?
На АПМ это полет по кругу (типа облететь вокруг дымовой трубы носом к ней), нужен для съемок. Что тут - подразумевается - ХЗ.
Area limit я полагаю.
Это отдельно настраивается, если надо.
С удовольствием обнаружил в ассистенте 1.3.0 регулировку скорости полёта.
Теперь и обновлять страшно 😃
Жуть как не удобно, особенно если за спину улетишь и развернёшься
Надо представлять в голове “вид сверху” (картинку из гугл-глобуса, север вверху)
[QUOTE=pww2000;5654006]
Теперь и обновлять страшно 😃
Для изменения полетных параметров не надо ничего обновлять. Достаточно только установить новую версию Ассистента 1.3.0. НО НИ В КОЕМ СЛУЧАЕ НЕ ОБНОВЛЯТЬ В НЕЙ ПРОШИВКУ СВОЕГО КВАДРА!
Вот в софте выбирается какой именно будет работать режим.
Уже писали выше:
- первый режим работает по принципу - запомнить стороны при взлете и на них ориентироваться. Т.е. пока квадрик перед тобою, как им не крути, движение вперед будет движением от тебя, влево-вправо - соотвествовать лево-право для тебя. Как только квадрик залетит в область сбоку от тебя, что б полететь от себя, прийдется нажимать уже влево-вправо. Как только квадрик оказался за спиной(относительно положения при взлете), то команда вперед - и он летит на тебя.
- циркуль - это ориентирование не на стороны света, а на точку взлета. И если в этом режиме нажать вперед, он всегда будет лететь от точки взлета, с какой стороны бы он не находился…
UPD:
Вот набросал вам от руки две схемы - двух режимов.

Крестик - коптер не зависимо от поворота корпуса. Стрелочка - голова коптера в этом режиме.
По центру нарисован пилот для понимания, но в реальности это скорее место взлета - так будет правильнее.
Вот в софте выбирается какой именно будет работать режим.
Ну может и так. Я просто по АПМ привык, что циркуль - это еще один режим для облета. Надо пробовать.
циркуль - это ориентирование не на стороны света, а на точку взлета.
Вот спасибо, надо будет попробовать.
Надо представлять в голове “вид сверху” (картинку из гугл-глобуса, север вверху)
Ну тогда уж проще в ручном режиме летать 😃
Удалось подключиться к Ассистенту 1.3.0. Настройки успешно меняются и грузятся в аппарат.
Попробовал кнопку Update - выдаёт ошибку. Видимо всё так и не судьба шить новые прошивки в старый Х4 контроллер.
выдаёт ошибк
ошибку выдавал, но я настырный, обновился))))
а по поводу режимов, наклейку прилеплю
кстати в асистанте видно, на какие режими переключаешся, главное запомнить…
мне главное в первый полет вывести, все режимы испытать, после смена приемника, на Devo F7
и подвес привесить…
что бы потом не скидывал проблему на китайцев, а только на свои кривые руки…
ошибку выдавал, но я настырный, обновился))))
Поделитесь секретом! 😃
Поделитесь секретом!
Попробую…
Подключаем питание, подключаем USB можно торкать передатчик, определится…
во всяком случае у меня так…
последовательность подключения, не менять
может по другому у кого, лицуха стоит
Так с подключением у меня всё получилось. Последовательность ту же использовал. Ассистент аппарат видит и параметры меняет.
Ошибка у меня получается при попытке апдейта прошивки.
шибка у меня получается при попытке апдейта прошивки
ну подождите, я отпишусь, по поводу новой прошивки, в основном пишут, что
Поддержка 6s, убрали лимит на 1000 м, нуи остальные ошибки, исправте, я в буржуйском не силен, что мог-понял
Ошибка
все просто, повторяем действия с подключением, отключаем USB, и по новой апгрейдимся…
блин, не лезте, мне то пофиг, есть на чем летать, потерпите
Ошибка у меня получается при попытке апдейта прошивки.
Андрей, а стоит ли мучиться с апгрейдом, ради лимита 1000м и возможности подключить батарею 6s? Полетные настройки можно изменить и без апгрейда, зато потерять квадр из-за возможной ошибки при прошивке запросто. Ну это ИМХО.
Всем доброго времени суток!
Хотелось бы задать владельцам Х6 несколько вопросов…
- на сколько времени полета хватает стандартного аккумулятора, при нормальной(плюсовой) температуре?
- кто-нибудь ставил аккумулятор бОльшей емкости, например 1300 Mah?
- нужно ли под винты моторов подкладывать шайбы?
- какую камеру посоветуете для Х6? Интересует камера, для записи видео на карту памяти.
Пока присматриваюсь к Mobius или SJCam M10… Или лучше взять что-то поменьше? - имеет ли смысл купить трехлопастные винты или стандартных вполне хватит?
Спасибо!
Всем доброго времени суток!
Хотелось бы задать владельцам Х6 несколько вопросов…
- на сколько времени полета хватает стандартного аккумулятора, при нормальной(плюсовой) температуре?
- кто-нибудь ставил аккумулятор бОльшей емкости, например 1300 Mah?
- нужно ли под винты моторов подкладывать шайбы?
- какую камеру посоветуете для Х6? Интересует камера, для записи видео на карту памяти.
Пока присматриваюсь к Mobius или SJCam M10… Или лучше взять что-то поменьше?- имеет ли смысл купить трехлопастные винты или стандартных вполне хватит?
Спасибо!
Владельцев Х6 здесь всего 2, напишу что знаю, у меня коптер всего 4 дня!!
1.Времени хватает на 3-6 мин, зависит от стиля полета. Рекомендуют сразу заменить разъем акка на силовой ХТ60, время полета увеличится почти в два раза.
2.При замене акка нужно учитывать размеры, не более 90*30*17. Это касается штатного места, если под днищем, зависит от фантазии.
Кстати про разъем и аккумулятор ссылка в посте №640.
3.Шайбы не нужны, это для Х8.
4.Камеру сам думаю какую, не знаю.
5.Запасные винты никогда не помешают, это расходный материал…
Самый живой форум по Х6 за бугром www.rcgroups.com/forums/showthread.php?t=2270231
Прикупил я себе FPV комплект вот такой: ru.aliexpress.com/item/…/1991722927.html
подскажите кто сталкивался с FPV как лучше реализовать питание и на приемник и на передатчик и на монитор? Проблема в том что приемнику и монитору по ходу нужно 12вольт.
Проблема в том что приемнику и монитору по ходу нужно 12вольт.
Купите для него 3s аккум тогда.
Купите для него 3s аккум тогда.
Прошу прощения за дурацкие вопросы, но я новичок в этом деле, можно по подробнее про этот аккум, ссылку какую нибудь где найти? Заранее спасибо)
Прошу прощения за дурацкие вопросы, но я новичок в этом деле, можно по подробнее про этот аккум, ссылку какую нибудь где найти? Заранее спасибо)
Это просто аккум из трех банок, такой же с завода на Х8 стоит. Базовый вольтаж - 11.1В(по этому вольтажу можно в магазинах выбирать аккум), в полностью зараженом состоянии чуть больше 12 вольт.