Hubsan X4 FPV H501S / Pro

Провел испытания самодельного УПРОЩЕННОГО подвеса с камерой SQ11:
Для шарнира взял разобранный стик от старого радиоуправляемого вертолета (мелколета) на ИК-управлении.
Основная “нога” из стержня шариковой ручки.
Камера конечно уступает по характеристикам стоковой, НО ее вес вместе с подвесом - 22.56 грамма!!!
Попытаюсь еще “доработать”…
Может уже 10 раз спрашивали до меня но тему всю листать накладно)
вопрос - передатчик дружит только с родным приемником ( видеоканал) или можно видео поймать шлемом типа EV800D?
Основная “нога” из стержня шариковой ручки.
Ну правильно…чем длиннее маятник, тел больше амплитуда качения в нижней точке. 😉
Может уже 10 раз спрашивали до меня но тему всю листать накладно)
вопрос - передатчик дружит только с родным приемником ( видеоканал) или можно видео поймать шлемом типа EV800D?
Поймать сигнал 5.8 с коптера можно любым устройством, при совпадении с настроенной частотой сигнала!
Немного выше по этой ветке - расписывали частотную сетку…
А на EV800D почти все частоты совпадают с каналами А и F.
Поймать сигнал 5.8 с коптера можно любым устройством, при совпадении с настроенной частотой сигнала!
Немного выше по этой ветке - расписывали частотную сетку…
А на EV800D почти все частоты совпадают с каналами А и F.
спасибо. и накой я купил багс 2 и горожу на него фпв …))
ладно. полетаем на нем и будем смотреть в сторону хабсана…он дальше летает с про пультом.)))
Для шарнира взял разобранный стик от старого радиоуправляемого вертолета (мелколета) на ИК-управлении.
Основная “нога” из стержня шариковой ручки.
Ром, видел на Ютубе видео с подобной мыслю, тоже думал попробовать, но чел просто подкинул мысль, а на практике не показал как работает. Идея не плохая, но как мне кажется ногу нужно жесткую делать, тогда не будет лишних колебаний. Раз уж ты взялся испытателем поработать, попробуй и ногу укоротить тоже как Андрей подметил;)
и накой я купил багс 2 и горожу на него фпв
А какой именно С или W, далеко летает? Вопрос по запчастям. Хорошие моторы, не пищат и винты как отбалансированы. Они идентичные с нашими, если путевые можно брать нам на замену, тем более моторы чуть мощнее.
Раз уж ты взялся испытателем поработать, попробуй и ногу укоротить
И ногу укоротить надо и шарнирное устройство надо на демпферы ставить…но вот подобрать столь “нежные” демпферы под столь малый вес камеры (имхо) задача почти не выполнимая. 😃 😦
Попытаюсь еще “доработать”…
Мне тоже пришла в голову идея простого подвеса. Сделал из жесткой проволоки (типа “рамки”) для компенсации наклонов вперед - назад. Ну, что сказать, компенсировал отлично - горизонт держал, но к колебания коптера добавились колебания подвеса. Качнется 2-4 раз и держит. А подобрать нужный демпфер к камере в 60 грамм… (впрочем, какой-то паролончик я подсовывал). Без обратной связи, затея трудная. Да и ветер будет качать такой подвес.
Я тоже за магнитный 😃
В таком случае получается, что GPS использует географический север, а дрон для поворота головы - магнитный.
Т.е. если указать координаты северного полюса, то дрон полетит на этот полюс головой повернувшись градусов на 10 в сторону от цели (для нашей местности).
Координаты точек на карте, координаты GPS - все они используют географический северный полюс. А вот датчик компаса - магнитный.
В целях приведения к единому знаменателю в прошивках PX4 (Пиксхавк), ардукоптер и т.п. используют меомагнитную модель земли - некоторую табличку магнитных склонений и наклонений,
интерполируя значения которой находят значения для точки по GPS.
www.garmin.ru/about/posts/22524/
Цитата из статьи: “Для того чтобы встроенный магнитный компас мог отделить полезный сигнал (магнитное поле земли) от различных помех, у него есть функция калибровки.”
Только я не про калибровку, с ней всё ясно. Я про то, что магнитный север от географического отличается на магнитное склонение для конкретной местности.
У меня сейчас 2 рабочих модели:
- HUBSAN X4 501SS из стока ( не открывал пока).
- VISUO XS809HW. Выкинул Wi-Fi с камерой и рекордером, поддал мощи в управление. Перевёл на 5.8 ггц.
Поставил туда:
камеру
banggood.com/1_2g-Super-Light-1000TVL-14-CMOS-2_8m…
OSD3060
banggood.com/RCD-3060-OS-Mini-OSD-FPV-Module-p-763…
Передатчик
banggood.com/Eachine-VTX03-Super-Mini-5_8G-72CH-02…
Сегодня сравнил качество видеоканалов этих моделей.
Hubsan пишет на карту очень прилично, резкость камеры хорошая на экране в 46 дюймов.
Но разговор о сквозных видеоканалах (прямо через приёмник на экран монитора).
Съёмный монитор с приёмником от шлема EV800 показывает от коптера Hubsan не совсем чёткую картинку.
Тот же монитор от EV800 с комплектом камера, OSD, передатчик, который поставил в VISUO показывает намного четче, светлее тёмные места и без задержки.
Пульт Hubsan показывает от своего коптера Hubsan не совсем чёткую картинку и гораздо хуже , несмотря на качественную камеру.
Значит видеоканал на Hubsan узковатый (полоса пропускания радиоканала меньше стандартной). 😉
В таком случае получается, что GPS использует географический север, а дрон для поворота головы - магнитный.
Т.е. если указать координаты северного полюса, то дрон полетит на этот полюс головой повернувшись градусов на 10 в сторону от цели (для нашей местности).
Олег, я правильно понимаю, что в момент активации RTH при подлёте к пульту (к примеру)так как фиксируется именно GPS, не трогая стик рудера при возврате (типо корректируя морду дрона ) при подлёте к конечной посадочной точке, мы замечаем как раз разницу магнитного склонения, как бы полёт по прямой, но каким то из лучей в качестве прямой (в зависимости от места нахождения, у гого то больше а у гого то меньше), так как географический и магнитный отличается, ну и если в прошивке полётника подкорректировать эти значения (склонения от местности), то можно избавиться от сего недуга.
Или я чего-то не понял 😃
P.S. получается показатель “Н” именно магнитный
Хочу задать каверзный вопрос.
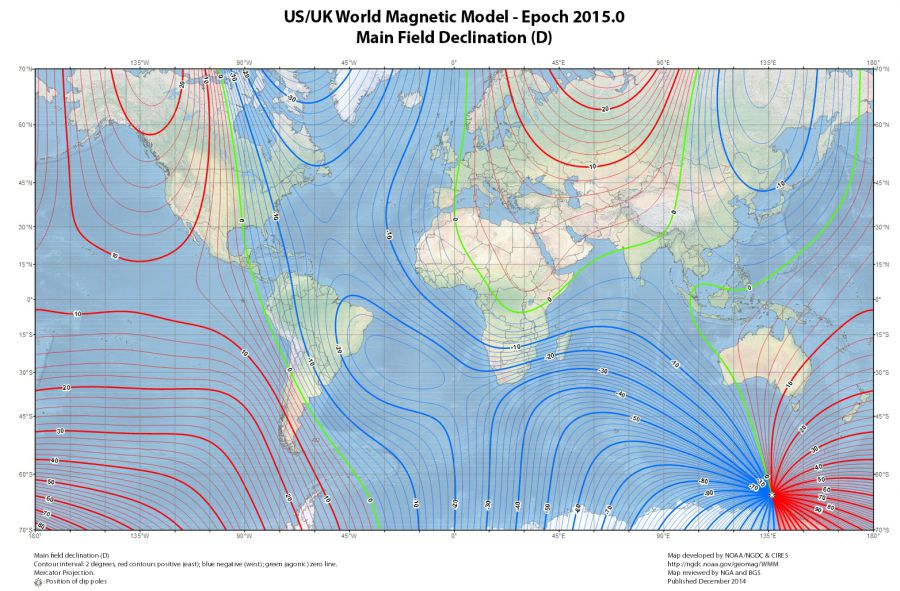
Как вы считаете, показания H (Heading, Азимут) телеметрии показывают угол относительно географического севера (как на картах или GPS) или относительно магнитного севера земли (как компас) ?
После калибровки компаса север показывает на магнитный полюс.
После взлёта и непродолжительного движения, коптер рассчитывает магнитное склонение (зная угол смещения по координатам GPS и показания компаса, это сделать не сложно) и вполне вероятно что может выставлять угол на истинный (географический) север. Но скорее всего он этого не делает и оставляет магнитный полюс в показаниях, но при этом где-то хранит данные о рассчитанном магнитном склонении (без него невозможен RTH).
Я думаю как gps, так как земная ось каждый год смещается.
Земная ось смещаться не может.
Смещается магнитный полюс Земли.
А магнитный компас разве не туда показывает куда gps ?
Магнитный компас показывает на Гренландию, где на текущий момент находится магнитный полюс. Сам полюс движется с огромной скоростью (последние 10-15 лет, а до того момента он сотни лет очень медленно перемещался) в сторону географического полюса и вероятно в ~2020 году максимально к нему приблизится.
GPS никаких полюсов не показывает, он показывает текущие координаты. Но если начать движение, то GPS приёмник может рассчитать направление географического полюса (не очень точно) и показать его. Направление магнитного полюса GPS приёмник рассчитать (и показать) не может т.к. для этого ему требуется таблица магнитных склонений (магнитное склонение это угол между географическим и магнитным полюсом в текущей точке планеты) на всю Землю, а это просто гигантский объём данных и они не поместятся в него. Учитывая то, что магнитный полюс движется с непостоянной скоростью и периодически меняет направление - таблица магнитных склонений бессмысленна. При создании карт геодезисты внизу карты всегда пишут что-то типа - “магнитное склонение +Х или -Х на ХХХХ год.”… пойдя по этой карте по компасу на большие расстояния, уже на следующий год после её создания - вы намного ошибётесь в пункте назначения и придёте с ошибкой в соответствии изменившегося за год магнитного склонения.
В таком случае получается, что GPS использует географический север, а дрон для поворота головы - магнитный.
Т.е. если указать координаты северного полюса, то дрон полетит на этот полюс головой повернувшись градусов на 10 в сторону от цели (для нашей местности).
Нет, он повернётся головой на географический полюс т.к. рассчитал и знает магнитное склонение. Увидеть это можно на нашем коптере с пультом H7000 при включении режима “облёт по заданным точкам(траектории)”. Без знания магнитного склонения коптер бы имел большие проблемы с RTH.
В целях приведения к единому знаменателю в прошивках PX4 (Пиксхавк), ардукоптер и т.п. используют меомагнитную модель земли - некоторую табличку магнитных склонений и наклонений,
интерполируя значения которой находят значения для точки по GPS.
Это было бы актуально лет 20 и более назад, но сейчас это глупо и бессмысленно или даже вредно. Причину указал выше. На сей день вам бы пришлось перепрошивать новую таблицу каждые 2 месяца, ну или хотя бы каждые полгода.
при подлёте к конечной посадочной точке, мы замечаем как раз разницу магнитного склонения, как бы полёт по прямой, но каким то из лучей в качестве прямой
У меня он всегда в RTH возвращается не боком а ровно, а магнитное склонение 10 градусов (что было бы заметно, если бы с таким углом летел).
Значит видеоканал на Hubsan узковатый (полоса пропускания радиоканала меньше стандартной).
Да…видео канал у Хапсана явно не DJI-ский, хотя и DJI по мере удаления дрона от пульта, тоже начинает сжимать канал…так что, не всё так плохо наверное, за цену Хапсана…если учесть, что летать они могут практически на одно расстояние. 😉
Хочу задать каверзный вопрос.
Олег… Колись…так какой тайный смысл этого вопроса!? 😉
Ага на гринландию с Москвы видимо и показывает. Я живу километров 600-700 от море Лаптевых, так вот компас показывает на север магнитный. А где гренландия я и не знаю, может где то дальше магнитного компаса?
Олег, я правильно понимаю, что в момент активации RTH при подлёте к пульту (к примеру)так как фиксируется именно GPS, не трогая стик рудера при возврате (типо корректируя морду дрона ) при подлёте к конечной посадочной точке, мы замечаем как раз разницу магнитного склонения, как бы полёт по прямой, но каким то из лучей в качестве прямой (в зависимости от места нахождения, у гого то больше а у гого то меньше), так как географический и магнитный отличается, ну и если в прошивке полётника подкорректировать эти значения (склонения от местности), то можно избавиться от сего недуга.
Или я чего-то не понял 😃
Ну да. Если не совсем правильно калиброван компас или акселерометр, то дрон летит лучом вперёд, т.к. ориентируется он по направлению магнитному, а корректирует координаты по показаниям GPS.
Вообще, GPS и сам может выдавать показание H, но только во время движения. Я бы, на месте разработчиков, этим воспользовался и корректировал бы калибровку компаса в полёте. Правда, от кривой калибровки акселерометра это не спасёт.
Получается, что если дрон смотрит точно камерой на объект, то или это ошибка калибровки компаса в десяток градусов, или в прошивке есть таблица магнитных склонений. Но пока я её там не нашёл. Есть какая-то табличка пока непонятная мне, но она слишком маленькая для таблицы склонений, а все остальные данные уже понятно для чего используются.
А вообще это я в сё к тому, как делать калибровку компаса. Добиваться нужно показаний на магнитный север или на географический ?
P.S. получается показатель “Н” именно магнитный
Похоже что да, но летит он по координатам GPS, а там север географический.
После калибровки компаса север показывает на магнитный полюс.
После взлёта и непродолжительного движения, коптер рассчитывает магнитное склонение (зная угол смещения по координатам GPS и показания компаса, это сделать не сложно) и вполне вероятно что может выставлять угол на истинный (географический) север. Но скорее всего он этого не делает и оставляет магнитный полюс в показаниях, но при этом где-то хранит данные о рассчитанном магнитном склонении (без него невозможен RTH).
Всё верно, кроме невозможности RTH. Он может начать движение в неправильном направлении (с ошибкой на 10 градусов) и если бы он и продолжал такое движение, то RTH был бы невозможен, но дрон постоянно с заданной периодичностью корректирует направление полёта (у нашего еть ПИД по GPS) и т.о. в любом случае летит куда надо, хоть и пытается носом повернуться не туда. Вот если бы он использовал склонение и акселерометр по yaw и компас были идеально откалиброваны, то он летел бы всегда чётко носом на цель. Но на расстоянии до несколько км 10 градусов при используемом алгоритме ошибка некритичная. Вот я и думаю, не забили ли они на склонение вообще.
На сей день вам бы пришлось перепрошивать новую таблицу каждые 2 месяца, ну или хотя бы каждые полгода.
Не всё так плохо. Магнитное поле земли меняется медленно и перепрошивать пришлось бы раз в 100-200 лет 😁
Олег… Колись…так какой тайный смысл этого вопроса!? 😉
Тайный смысл - понять как правильно калибровать компас: на магнитный север или на географический опираясь. Понять это можно или полно детально разобравшись в алгоритме прошивки или по косвенным признакам поведения дрона. Вот я пытаюсь пойти сперва вторым путём 😉
Тайный смысл - понять как правильно калибровать компас:…
Ну так выкладывай “поправленные” прошивки в обоих вариантах…попробуем оба, а там видно будет!
Можно конечно попробовать поменять порядок штатной калибровки… Начать с вертикальной, а потом горизонтальной! 😃)) шутка.
Не всё так плохо. Магнитное поле земли меняется медленно и перепрошивать пришлось бы раз в 100-200 лет
Вы так уверены? 😃

Это траектория движения магнитного полюса Земли.
Цифрами показаны годы измерений. Пунктирной линией предполагаемая траектория в будущем.
Последние 400 лет магнитный полюс Земли находился на территории Канады, но ушёл за её пределы в 2010 году.
Старые геодезические карты до 2000 года показывают магнитное склонение. После 2000 года магнитное склонение не показывают т.к. это стало бессмысленно (в наши дни, в некоторых районах, оно смещается на градусы в год, а в Гренландии и Канаде на десятки градусов в год).
PS Так что ваше утверждение было верно только до середины 90-х годов XX века.
или можно видео поймать шлемом типа EV800D?
Можно. Я чуть выше давал ссылку на картинку:
Ребят, подскажите прогу что бы прошивку слить с коптера по usb???
Такой нет проги, может наоборот залить на коптер?
Сыну на НГ Дед Мороз принес под елку H501SS стандарт и шлем Eachine EV800 😃 Отличный коптер за свои деньги, пока отлетали 5 аккумов, летали на 250 вверх и 300 вдаль. Шлем принимает видеосигнал стабильнее , чем пульт. Записанное видео по качеству устраивает. Ничего пока не прошивали, все устраивает. Ну и один проп сломали. Нравится игрушка 😃