Xiaomi Mi Drone FPV 4K

Я как раз эти 5.5км летал с донглом. В смартфоне мобильный интернет. И логи должно писать и без него. Это запись с сигнала от дрона, а не от интернета. Интернет отвечает только за скачку спутниковой карты.
Фото сделано нажатием на кнопку минус громкости и вкл. Андроид. Уже после полета, при просмотре логов. А видео сделано приложением дурекордер во время полета. Ничего сложного.
Ничего сложного.
Тогда не могу понять, что делаю не так…
Логов полёта у меня нет.
Может чего не включил?
Их даже можно увидеть зайдя через проводник в папку MidroneEn . Файлы в папке logdown. Занимают сотни мегабайт. Я их часто тру чтобы не загружали память.
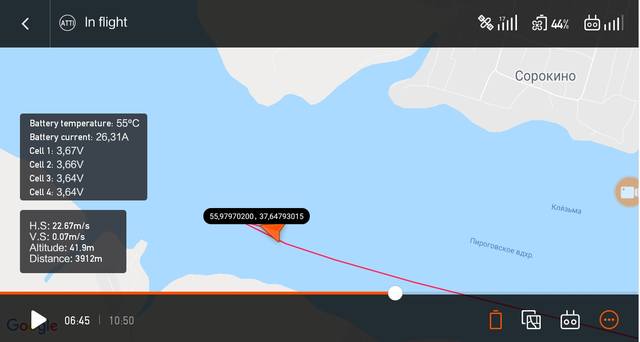
Вот скан лога. Сразу видна разница полета против ветра и по ветру.
кстати, попробуйте лететь помедленнее, не на макс.скорости. вероятно жор будет меньше и дальность увеличится.
на мавике у меня в спорт режиме всегда существенно меньше полетное время, чем в обычном…
да и на дальнолетах 6ти 7ми дюймовых всегда приходится исать крейсерскую скорость, когда mah/km оптимально. и это точно всегда не максимальная скорость ))
Я проводил опыт. Чем выше скорость тем меньше относительный расход АКБ. По отношению % на км. Мидрон гораздо больше жгет просто стоя на месте и тем более опускаясь (ещё больше чем при подъёме). Видимо при высокой скорости есть эффект планирования как у самолёта. Только вместо плоскостей крыла - поток сжатого воздуха от четырех пропеллеров. Похожее явление есть и у обычных вертолетов.
В среднем в атти выходит 10% на 2км.
Странно. А вы как проверяли? По % батареи?
Допускаю, что это весьма условная цифра.
Есть же амперы в программе. Полагаю, более точная величина. Можно посчитать математически.
Мидрон отличается от других коптеров тем что при 14% он принудительно делает приземление. Поэтому все расчеты приходится делать в этих фигуральных процентах. Ампераж и вольтаж не играет никакой роли по факту. Это не айнав и обычные контроллеры. Тут намеренное уменьшение времени полёта без учёта реального ресурса банок АКБ (в Ютубе полно роликов когда мидрон летел и при 0%).
Поэтому я продолжу модернизацию внешней АКБ. Сейчас к концу полета разница в реальном вольтаже между внешней и внутренней батареей почти один вольт (14.8 и 15.5В). Это из-за разной степени охлаждения (внутренняя охлаждается хуже внешней). Можно вообще смело добавить одну банку для внешней АКБ и превратить её в 5s. Что даст ещё дополнительно 20-25% заряда (тогда внешняя будет разряжаться полнее, почти до 3В на банку и общее КПД вырастет). Благо у меня лежит несколько распаянных банок от залочки. Они мне ничего не стоят.
Соединив 4S и 5S параллельно в лучшем случае получим ещё один залоченный аккумулятор или сгорит всё нафиг.
Лучше посоветуйте, куда прилепить трекер, так, чтобы он ничему не мешал.
Ампераж и вольтаж не играет никакой роли по факту.
как?
Сейчас к концу полета разница в реальном вольтаже между внешней и внутренней батареей почти один вольт (14.8 и 15.5В). Это из-за разной степени охлаждения (внутренняя охлаждается хуже внешней).
не думаю. скорее всего разная деградация. ибо 55 град - это ниочем для липо. и вообще разогретая умеренно - она имеет лучшую токоотдачу. гонщики на гоночных дронах их специально греют перед полетами, чтобы ток лучше отдавали.
Можно вообще смело добавить одну банку для внешней АКБ и превратить её в 5s. Что даст ещё дополнительно 20-25% заряда (тогда внешняя будет разряжаться полнее, почти до 3В на банку и общее КПД вырастет).
омг. можно я теоретически замечу - этого делать не надо…
Лучше посоветуйте, куда прилепить трекер, так, чтобы он ничему не мешал.

Эту фотку я уже видел))
А где находится GPS-модуль самого мидрона? они друг другу не мешают?
Вообще такое ощущение, что весь корпус занимает батарея, а всё остальное находится в лучах))
Модуль гпс дрона в голове спереди, там где лого ксяоми. Поэтому трекер никак не мешает. А в лучах только моторы и есцешки.
Сегодня вроде неплохой прогноз: осадков нет, западный ветер 3м/с. То есть встречный ветер (при полете вперёд). Думаю можно попробовать. Но в этот раз не стану рисковать и лететь в атти (вперёд), полечу в атти только назад. В гпс дрон на встречном ветре всё равно не разгонится выше 16м/с (программное ограничение). Будет наверное 13-14м/с. И чтобы не повторять ошибки с дисконнектом при развороте полечу обратно кормой.)
Гидрометцентр коварно обманул. Встречный чёртов ветер был 10-12м/с. Поэтому только 6км и тренировка полета кормой в атти (оказалось очень неудобно, но дисконнекта уже не было).
А вот что смог на одинарной АКБ по тому же маршруту. Не стал рисковать и на 45% повернул обратно.
А вот что смог на одинарной АКБ по тому же маршруту. Не стал рисковать и на 45% повернул обратно.
а у вас нет свежей стоковой батареи. ибо 11 минут полетного времени на стоке как-то совсем печально. даже на макс.скорости…
Это нормально для такого ветругана и для атти. Но теперь я знаю что могу летать на 5км на одном АКБ с возвратом на 10%. Что тоже неплохо. Но на двух хочу взять рубеж 7км (правда уже водохранилище закончилось:-)).
Если Вы решили летать ночью и толку от камеры нет, то почему бы не провести эксперимент без камеры?
Меньше вес, меньше расходов энергии на подвес (подвес жрёт и хорошо), лучше обтекаемость (аэродинамика).
Я бы ещё и ножки посоветовал поднять, но нарушится ориентация компаса…
Хотя, проверенно, ножки (любые) это парус.
На других дронах (из личного опыта) без ножек летает в ветер отлично, с ножками - корова. Хотя ножки там по площади меньше, чем у МиДрона.
На прошлой неделе тестил большую раму с механизмом подъёма ног, эффект тот же…
Без камеры не будет идентичности результатов теста. Ну и камера тоже не лишнее, всё таки видны огни на берегу. А начиная тест я заранее разведал площадку для аварийной посадки если не будет хватать заряда. В 2.5км от места взлета. И когда я пролетаю эту точку берега я сверяю % заряда. Если есть 20% то лечу дальше. Если меньше - совершу посадку. Это необходимая мера предосторожности.
Всё таки жаль что мозгами мидрона ещё никто не занялся. Как это делают массово с дронами дижиаев. Очень неудобно что у нас есть ограничение в 500м для полета по точкам гпс. И что нет возможности вводить эти точки нормально. В виде длины и широты. Было бы проще. А не чертить эти кривые в небе, борясь с ветром и тратя заряд АКБ на маневры. Да и аэрофотосъемки делать удобнее. Недавно потребовалось отснять квадратами большую площадь. Сделать точно это почти невозможно. Дрон показывает расстояние только одной линии фотоквадратов. А другие соседние ряды точно не снять. Не построить сетки раскадровки. А ведь всё это возможно просто подкорректировав по. Не меняя железо…
На днях летал, увидел следующее сообщение - Battery communication error, land immediately. Ну, то есть, нет связи с батарейкой, вали на землю. Вообще не понял - что это было??? Дело было в сумерках, проводить эксперименты по повторному взлёту не стал. Причём пульт завибрировал, как при высаженной батарее, но коптер сам снижаться не стал, к счастью.
Ну и ещё один вопрос вдогонку. Опять меня накрыла чёрная полоса с компасом. Коптер категорически отказывается взлетать, а если его таки поставить в положение, в котором взлёт возможен - унитазит, и медленно вращается по кругу когда висит на месте.
На назе в таком случае поворачивают тарелку GPS-приёмника. Но тут-то ГПС и компас, насколько я понял, прибиты “гвоздями” внутри, и никуда их не повернёшь. Чего делать?
В атти летает, но в атти летать некомфортно.
Внешний компас (который на ноге) размагничивал трансформатором.
Откалибровать компас у меня не получилось ни разу за последний месяц.