Eachine Tyro 79

А такой вопрос: в данном случае GPS используется только для экстренного возврата? Или еще какие-то режимы поддерживаются?
Насколько я понял - барометра там нет и компас не используется
- Для возврата без барометра и компаса.
- Для отображения координат на OSD для лёгкого поиска при падении.
GPS используется
для возврата, несколько раз выручал при фалсейвах, а через телеметрию на аппе смотрю координаты, если где не вписался или батарея кончилась и упал…
на осд вывожу только время арма, батарею и направление/расстояние от дома.
на uart2 посадил gps, на софтсериал телеметрию, по телеметрии проблема возникает редко
Не могли бы вы чуть более детальнее рассказать как настроили? Подскажите, возможно ли одновременно иметь: Телеметрию, GPS и SmartAudio или придется от чего то отказаться? На борту моего полетного контроллера имеется второй порт в котором есть питание +5V, а так-же имеет контакты под LED и бузер. Я бы с радостью отказался от использования LED, и отдал бы его под SmartAudio. Ведь как я понял в этом-то и смысл софтового порта - это переназначение линий.
ли придется от чего то отказаться?
Можно ни от чего не отказываться, в теории доступны 2 софтсериал порта, к одному например можно подключить смартаудио, к другому телеметрию, а назначить в cli можете 5 мотор, 6 мотор или лед например, помните, что при сбросе настроек софтсериал удалится и настраивать нужно будет по новой. Софтсериалы грузят проц и как будут работать 2 сразу я не проверял.
У меня всё просто:
к uart 2 припаяны tx2-rx rx2-tx gps,
к выводу пятого мотора провод от приемника,
в cli:
resource MOTOR 5 none
resource SERIAL_TX 11 B03
save
в настройке портов напротив софтсериал выбран s.port (115200)
проц tyro79 грузится на 22-30%
+5 вольт на плате у меня bec не выдает(сгорел походу), поэтому стоит внешний bec и все +5 к нему идут.
Как у Тиро79 включить Смарт Аудио?
Смарт Аудио
припаять дополнительный провод от rx видеопередатчика на свободный tx контроллера(uart2 или softserial),
включить во вкладке порты соответствующий порт.
припаять дополнительный провод от rx видеопередатчика на свободный tx контроллера(uart2 или softserial),
включить во вкладке порты соответствующий порт.
Пробовал. Припаивал провод между этими выходами.
В итоге пропало RSSI. Отпаял провод - всё вернулось на свои места. Припаиваться нужно к этим выходам?
Где-то в интернетах прочёл, что если добавить четвёртый провод к шлейфу между ПК и VTX (по-умолчанию у Тиро79 три провода, которые соединяют ПК и VTX), то будет работать смарт аудио. Это так?
В итоге пропало RSSI
- приемник какой?
- rssi как подключено? аналоговое на вывод rssi или по доп каналу?
- не вижу на картинке следов пайки, после того как провод пропаял на 2 порту смартаудио выбирал?
- скриншот вкладки порты сделай.
Припаиваться нужно к этим выходам?
если хочешь смартаудио на uart2 прицепить то да, сюда паяем.
четвёртый провод к шлейфу между ПК и VTX (по-умолчанию у Тиро79 три провода, которые соединяют ПК и VTX), то будет работать смарт аудио. Это так?
да, четвертый провод это rx, соединяем его с tx на полётнике
Практически всё, мои tyro79 больше не существуют. теперь вместо них две ласточки.
Первая для погонять. на 4s легко разгоняется до 150, летает до 1,5 км, в ней родные только моторы(контроллер f7,esc 40a):

Вторая для неспешной съемки(камера hawkey split 4k, моторки 1306), родные только контроллер, пропы и esc:

у обоих рамка ласточка f2 160, видеопередатчики ечайн 400мВт, приемники jumper r1.
Вторую еще толком не тестил, но летать должна дольше чем первая за счет моторов и пропов. вес у обоих одинаковый по 196 грамм без аккумов.
Моторы получаются самыми крепкими из всего комплекта
кстати, вышли из строя за сезон с мая по ноябрь(менял их начиная с октября) три мотора, все вращение по часовой стрелке, все располагались спереди слева. подозреваю из за крашей…
Всем привет!
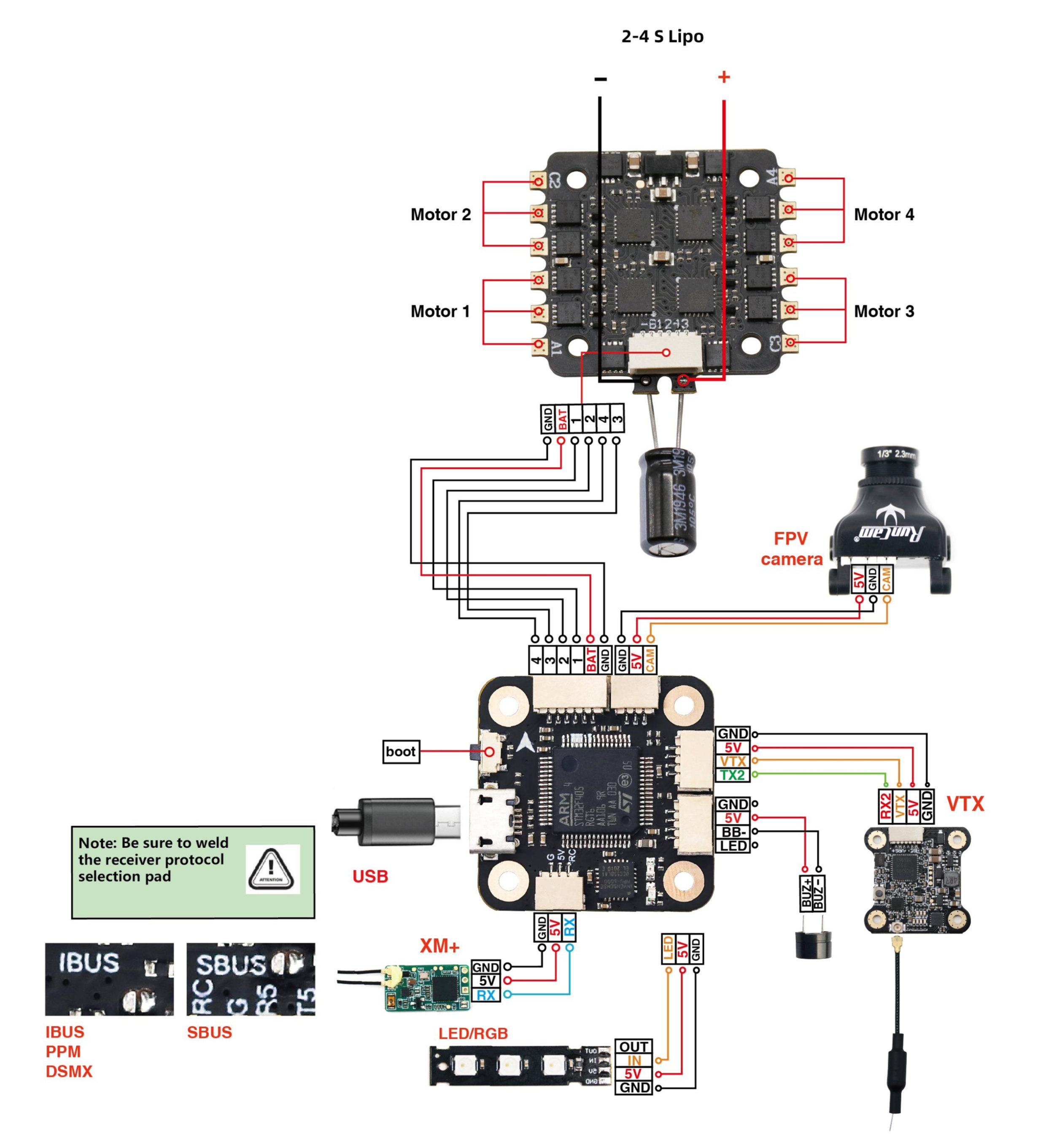
Может кто подсказать на какой штекер (с права) подключается VTX. Нигде нет описания, а они оба на 4 пина.
Заранее благодарю!
Приемник наверно.
У приемника 3 пина , он сзади подключается
если приглядется то видно что рядом с ESC написано CAM. следующий VTX.

oscarliang.com/tyro69-diy-fpv-drone/

Могу скинуть фотку получше , ничего не подписано.
Мой контроллер отличается от вашего на фото.
Думаю все-таки там же.
Спасибо за подсказку!
Кстати, как насчёт 4S, можно не опасаться?
Выше были посты, что пыхали пк или ещё что то.
У меня кстати похоже накрылся vtx. Заказал акк .
подключается VTX
на картинке возможно верхний слева, только пины проверьте, китайцы могли намудрить с выводами,
а вообще раньше на tyro79 другой полетник устанавливали на 411 проце с прошивкой matek411, а этот похож на mini405 с прошивкой не matek,
кстати а инструкции в комплекте не было?
как насчёт 4S, можно не опасаться?
заявленная мощность моторов 350W, на 4s потребление может быть более 20 ампер, а esc на 20а, поэтому полеты на 4s на свой страх и риск 😃
на картинке возможно верхний слева
посмотрел сейчас на бангуде, действительно 405 проц и немного измененная esc, там же есть и схема подключения без пайки, хотя пайка намного надежнее
Это не Матек точно, фирмваре Vgoodrcf4. Конечно же никакой инструкции не было, так бы не спарашивал. И еще вопрос. для IBUS перемычка должна быть замкнута? Не видет приемник…
Спасибо!
ЗЫ : Разобрался, не увидел второй пин, было запаяно на SBUS
Здравствуйте.
Заказал первый свой коптер. Tyro79.
Сейчас пока посылка едет изучаю информацию по теме.
Смотрел видео как люди собирают коптер. Кто-то провода от моторов крепит стяжками, кто-то сначала продевает в термоусадку и потом стягивает термоусадкой.
Вопрос есть ли какие технические ньюансы как лучше делать?
Здравствуйте.
Заказал первый свой коптер. Tyro79.
Сейчас пока посылка едет изучаю информацию по теме.
Смотрел видео как люди собирают коптер. Кто-то провода от моторов крепит стяжками, кто-то сначала продевает в термоусадку и потом стягивает термоусадкой.
Вопрос есть ли какие технические ньюансы как лучше делать?
Да нет никаких нюансов. С термоусадкой эстетичней. Стяжками тоже можно, у этих моторов провода в жёсткой изоляции, стяжками не передавятся. На стяжки и антенны приёмника закрепить можно.
И пропы сразу нормальные ставить нужно. Только не нужно их ставить пока квад не настроен окончательно, если пальцев лишних нет. Сначала все проверить БЕЗ пропов.
И пропы сразу нормальные ставить нужно.
Покупал два, один на запчасти, так вот второй пришёл с другим видеопередатчиком и пропы гемпфан были.
И пропы сразу нормальные ставить нужно.
Тогда вопрос такой. Я пока не знаю что значит “плохие”. Может наоборот учиться лучше на “плохих” так как вначале никакой эквилибристики, и больше шансов поломать их?