JETI Duplex EX

Пока дождь и ветер…
Мой старый дипломат исполнил-таки свою журавлиную песню 😇, перед тем как наконец окончить свой долгий и яркий путь. Решил я немного доработать штатный кейс, идущий с аппаратурой в комплекте. Многим известна проблема, когда нужно просто бросить несколько мелких батареек, винтики, шнурок на плечи и, взяв пенолёт подмышку, выйти подлетнуть, короче, когда тащить весь полётный ящик смысла нет, а вот всякое мелкое барахло есть. Очень удачно, что родной ящик позволяет упаковать передатчик вместе со столиком, не разбирая всю эту конструкцию. Так как стики у меня немного короче штатных, то дуги подвеса я чуть приблизил к основанию, что дало возможность выиграть место над самим передатчиком. Что из всего этого вышло:





Таперича олИнклюзив и геморроя с вопросом “чего куда положить и по каким карманам рассовать” нет, вроде мелочь, а так приятно… 😎
Будем надеяться, что Джети все же сделает модули для дсм2 и футабы…
Бардзо маловероятно, а как же родные модули?.. Тут, скорее, традиционная надежда на наших китайских товарищей, хотя ценник на приёмники с фулДуплексом вполне гуманный.
а как же родные модули?
Вот именно, берешь родной JR модуль и подрубаешь к джетям, благо PPM имеется. Единственная творческая проблема как эти два девайса симпатично состыковать друг с другом, чтобы лишних проводов не торчало 😃 и можно не ждать милостей от китая… 😉
Вот именно, берешь родной JR модуль и подрубаешь к джетям…
Ну, это понятно!
Я, говоря о родных модулях, имел ввиду их продажу в первую очередь, проект ведь должен быть ещё и коммерчески успешным 😉. Да и потом, на их протоколе масса разных вкусностей построена. Сейчас только понял, как здорово, когда в аппаратуре есть Jeti box, мало того, что очень удобно, так ещё и существенная экономия.
когда в аппаратуре есть Jeti box
Дим, просвяти, если не сложно про девайс…
на данный момент вижу в джети надежность связи, хотя про их протокол я так и не смог разобраться, ну эт пока не столь важно. Сам передатчик видится мне крайне удобным, к тому же полноценная телеметрия и удобство настроек + мегафетиш в виде заменяемых тумблеров. а вот про джетибокс… - если не внапряг.
а вот про джетибокс… - если не внапряг.
А какой тут напряг? Есть такой девайс - espritmodel.com/jeti-duplex-data-recorders-telemet… , точнее их три: самый простой Jeti Box mini, затем просто Jeti Box и самый навороченный Jeti Box Profi. Основная задача этих БОКСов программирование и управление (телеметрия, показания датчиков и т.д.) устройствами Jeti, как-то: приёмники, регуляторы, БЕКи и ещё чего-нибудь, чего я не знаю 😃. Дык вот этот самый Jeti Box Profi и встроен (эмулирован) в передатчик в виде отдельного пунктика меню System. Если не поленится и залезть по моей ссылке выше в мануал, то пунктик 9.5.8 аккурат про это:
For maximum compatibility with 1st generation Jeti DUPLEX, the
DC/DS-16 is equipped with a Jetibox emulation function. This
emulation shows its information in the legacy two-line display
format. Use the function keys to navigate the Jetibox menu in order
to view or change the individual parameters. You can use also
wirelessly access a bound receiver’s menu and/or any connected
telemetry sensors connected to the receiver.
На Эсприте выложили схему коммутации устройств Джети для наглядного понимания того, как может работать телеметрия.
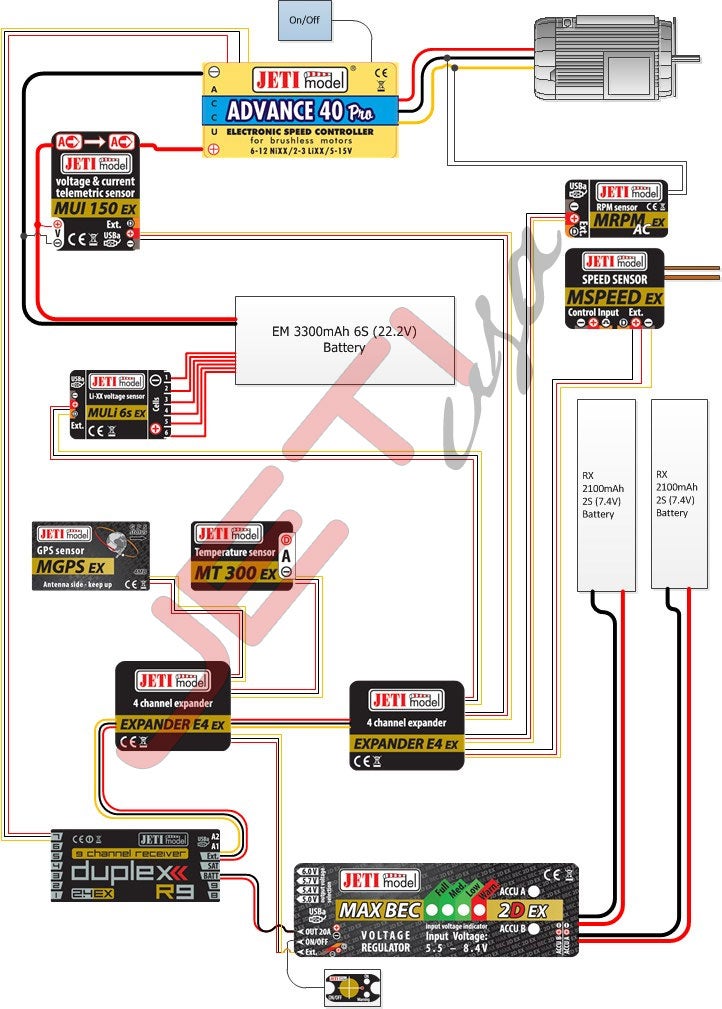
P.S. Там есть и видео того, как это работает в реале.
…есть у Jeti модули для использования JR-ровских приемников DSM2 & DSMX…
Использование имеющихся модулей многих интересует не только у нас. Если верить недавнему посту на рц-групс, то суть вопроса:
“Currently I’m using a JR PCM9X II with a spektrum module and so I’ve got a lot of spektrum receiver. My question is simple : Does someone succeed in having wireless connection between the JETI transmitter and a spektrum module thanks to the PPM output of the RSAT item. In theory, it should work but I will be pleased to see a working setup…”
и вот такой появился ответ: “…at least I’m happy to tell you the bench tests are successfull! I’ll try to find time to build a shock proof prototype before the end of the week for the field tests…”
То есть надежда есть 😃 .
Ссылка на форум: modelisme.com/…/170727-test-de-la-radio-jeti-dc-16…
Вот с каким моментом столкнулся. Настраиваю поведение сервы элерона в меню настроек серв. У сервы есть несколько настроек, в частности (значения написаны по дефолту):
Max positive : 100%
Max negative : -100%
Max positive lim : 125%
Max negative lim : -125%
Из названий пунктов, думаю, понятно их назначение. Суть производимой мной настройки выставление крайних точек для сервы, и вот тут я становлюсь в тупик т.к. выставляя значения:
Max positive : 120%
Max positive lim : 150%
на практике наблюдаю, что серва реагирует на перемещение стика до тех пор, пока не превышено 100% Max positive, при условии, что Max positive lim 150% т.е. заставить серву “уехать” больше 100% у меня не получилось 😃 . Стик продолжает движение, монитор показывает, что максимальное отклонение на стике 120%, но серва на это уже никак не реагирует, оставшись на 100%. В абсолютной величине это 90 градусов (между крайними точками при полном отклонении). На той же Футабе енд-пойнт легко идёт за отметку в 100% и для той же самой сервы я получил угол почти 115 градусов. ХЗ правильно это или нет, но с моей точки зрения логика здесь нарушена. Если ставлю лимит меньше 100% - всё точно отрабатывает, ограничивая ход, но больше 100 - никак. Есть у уважаемого сообщества какие-то на этот счёт мысли?
P.S. Опыт повторил на цифровой серве, результат совершенно такой же.
Да, Дим - действительно странно. Сервы по любому отрабатывать должны… Боюсь предположить, но возможно это баг… собственно - первый из обнаруженных. а что говорят иностранные коллеги, ты не спрашивал на rc universe, например…
Для начала, не могли бы вы уточнить данная проблемма присутствует только на элеронах или на остальных каналах тоже.
Если только на элеронах то там есть функция Aileron Differential которая определяет лимит отклонения элерона отдельно вверх и вниз, для компенсации в связи с различными сопротивлениями элеронов при отклонении вниз и вверх.
Я данной аппаратуры пока не имею, но предположил данный вариант прочитав инструкцию, так что заранее извините если написал ерунду.
Разобрался. Причём, эта мысль приходила ко мне во время обсуждения проблемы с Виктором (Vic_Bull) по телефону, но тогда (за разговором) я пропустил пункт меню настройки приёмника и, ессно, задачу не решил. Решение следующее, велечины максимальных и минимальных значений выходных импульсов на каналах приёмника настраиваются непосредственно в приёмнике (через JetiBox) и по умолчанию имеют значения min 1.0ms - max 2.0ms, что и соответствует -100% +100% в передатчике. Чтобы разрешить приёмнику крутить серву далее этих значений (установленных по умолчанию) необходимо их изменить (уменьшить/увеличить) соответственно, и т.о. я установил на приёмнике:
ATV HighLimit Yn 2.2 (было 2.0)
ATV LowLimit Yn 0.8 (было 1.0)
“Yn” - номер нужного канала.
Теперь серва “поехала” почти на 125 градусов, чего мне и было нужно. Не думаю, что такая операция обязательно нужна (на остальных каналах расходов заглаза), но знать о ней и иметь ввиду - полезно, тем более, что там настраивается поведение приёмника при пропадании сигнала (FailSafe и пр.) Возможности такой настройки есть на всех приёмниках (на последних версиях точно), я колдовал с самым маленьким 5-и граммовым. Опять же оказался полезным эмулятор JetiBox-а в передатчике, им всё и сделал.
Схема программирования приёмника (кликабельно):

Очередное обновление прошивки 1.06
Вот с каким моментом столкнулся. Настраиваю поведение сервы элерона в меню настроек серв. У сервы есть несколько настроек, в частности (значения написаны по дефолту): Max positive : 100% Max negative : -100% Max positive lim : 125% Max negative lim : -125% Из названий пунктов, думаю, понятно их назначение. Суть производимой мной настройки выставление крайних точек для сервы, и вот тут я становлюсь в тупик т.к. выставляя значения: Max positive : 120% Max positive lim : 150% на практике наблюдаю, что серва реагирует на перемещение стика до тех пор, пока не превышено 100% Max positive, при условии, что Max positive lim 150% т.е. заставить серву “уехать” больше 100% у меня не получилось . Стик продолжает движение, монитор показывает, что максимальное отклонение на стике 120%, но серва на это уже никак не реагирует, оставшись на 100%. В абсолютной величине это 90 градусов (между крайними точками при полном отклонении). На той же Футабе енд-пойнт легко идёт за отметку в 100% и для той же самой сервы я получил угол почти 115 градусов. ХЗ правильно это или нет, но с моей точки зрения логика здесь нарушена. Если ставлю лимит меньше 100% - всё точно отрабатывает, ограничивая ход, но больше 100 - никак. Есть у уважаемого сообщества какие-то на этот счёт мысли? P.S. Опыт повторил на цифровой серве, результат совершенно такой же.
Это наверное как в футабе 9z
макс негатив и позитив-это расход машинки
макс позитив и негатив лимит - это то максимальное значение,за которые сервы никогда не могут выходить.
в футабе с этим сталкивался-в миксах можно заставить машинку уходить дальше максимально установленной в настройках величины. а что б таким образом не поломать сервы-элероны-другие движущие части-и был придуман данный АБСОЛЮТНЫЙ ЛИМИТ,за который ни-ни никогда))
Это наверное как в футабе 9z
Именно. Я, собсно, и коментить не стал т.к. всё интуитивно понятно.
Сегодня провёл, наконец-то, полевые испытания. В качестве подопытного “кролика” был использован метровый пенолётек с 7-и канальным маленьким (~7гр.) приёмничком. По данным описания гарантированный приём (в режиме тестирования) должен быть на расстоянии не менее 50м. Включив режим тестирования и одновременно запустив тест серв я потопал в поле, сам самолёт оставил на земле за машинами. С товарищем договорились, что как только сервы начнут сбоить он подаст сигнал. Всё оказалось проще, товарища можно было и не напрягать т.к. примерно в 100м от самолёта я получил сообщение от самого передатчика о том, что сигнал пропадает. Самолёт, со слов друга, в какой-то момент неуверенно дёрнул элеронами. На этом тест я и закончил, с вполне удовлетворившим меня результатом.


Ещё одно замечание, касающееся встроенного динамика - громкость очень приличная и в поле все сигналы слышно отменно. В конце уже, фана ради, стал летать под музыку, но для этого всё-таки нужны наушники.
Чёта в этой теме я начинаю ощущать засилие самого себя… Фидбека нет и я даже понятия не имею, читает ли это кто-то ещё. Если и правда это кому-то интересно - дайте знать, а то может и правда, говоря словами Козьмы Пруткова, пора “заткнуть фонтан”.
На сей раз выложу видео по прошивке 1.06, которая научила аппу “говорить”.
www.youtube.com/watch?v=L9p4FIY8sa8&feature=plcp
Ещё было бы очень интересно услышать мнение владельцев других брендов, какие там фичи реализованы.
Не стоит прекращать данное начинание, тема востребована, может и в не столь большом масштабе.
Лично я уже заказал и аппу и девайсы к ней, сейчас просто жду когда ее произведут и привезут, обещают в конце этого начале следущего месяца, а там посмотрим. После смогу полноценно присоединиться к данной теме.
Надеюсь, что данный девайс обретет некоторую популярность в модельных кругах нашего города.
Так что я за продолжение!)
Я тоже за продолжение.
Просто пока владельцев, мягко скажем, не много, вот и приходится одному отдуваться.
Со временем станет проще.
и я, и я за продолжение!!!
Очень интересная тема! Подумываю об “мыльничном” варианте. Я за продолжение!😃
Дмитрий, а проводились ли сравнения (полевые тесты) с Graupner mc-32?
Есть ли какие-то принципиальные отличия?
Функционально аппараты схожи, но возможно есть какие-то особенности одного и другого?
Дмитрий, а проводились ли сравнения (полевые тесты) с Graupner mc-32?
К сожалению, пока с Мурадом не пересекаемся, но всё впереди и ничего не мешает провести сравнительные испытания. Тот тест на дальность, который я уже проводил, делался на приёмнике (Rx7) малого и среднего радиуса дальности т.е. с чувствительностью -98 дБм, у приёмников большого (Full range) радиуса чувствительность ещё выше -106 дБм, но в реале (приёмник на 9 каналов входит в комплект) я ещё не тестировал.
Честно говоря, по всей этой бодяге (РПУ, РПрУ, основы РРВ) у меня диплом и глядя на всю эту бытовуху я не очень понимаю, как такими “тестами” что-то можно оценить. Производитель чётко говорит, если на расстоянии 50м всё Ок - летай и не парься. Очень много факторов, влияющих на качество радиосвязи, и то, насколько грамотно выполнен монтаж всей электрики борта, радиопрозрачность материалов, правильность установки приёмника и расположения антенн для формирования, опять же правильной, ДН, ну т.д. и т.п… Это я всё к чему, к тому, что стандарт на выходе передатчика 100 мВт, чувствительность приёмников также у всех примерно одинаковая, а вот дальше уже начинается работа (зона ответственности) моделиста, которая, по моему скромному разумению, и определяет эту самую пресловутую дальность. Я сейчас не рассматриваю те случаи, когда речь идёт об откровенных косяках со стороны производителя, ну и сравнивать всё-таки разумно устройства одного ценового диапазона.