Новинка от Mikado: VBar NEO

Кстати. Для тех, кто использует микадовское крепление антенн …
Я вот такую штуку приобрел (127р, Пластик как в к-баре - колкий, зато трубки мягкие и длинные):
Я вот такую штуку приобрел (127р, Пластик как в к-баре - колкий, зато трубки мягкие и длинные):
У меня такие на всех вертах.
А у меня обычно просто висят футабовские усы как попало…
История в картинках.

На самом деле все было вчера. Воспроизвел ситуацию сегодня для снятия картинок.
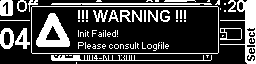
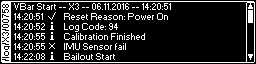
Итак. Вчера после подключения четвертого пака VBC заорал как раненый монстр и высветил на экране первую картинку. Орал секунд 10. На Neo буковка V быстро мигала красным цветом. При этом от стиков все двигалось правильно, при перемещении вертолета тарелка и хвост отрабатывали как положено. В логах было как на картинке 2 (ну не было последней строчки, о чем ниже).
Отключил и снова подключили пак. С третьей или четвертой попытки инициализация прошла. Еще раз все проверил, аккуратно взлетел, повисел, потом покрутился-покувыркался. Летит нормально. Потом отлетал по полной программе еще один пак, хотя инициализация тоже прошла не сразу. Решил, что сенсор подмерз слегка (был легкий минус), правда прошлой зимой и при -10 таких проблем не было.
Пошел домой. Попробовал снова после того, как вертолет отогрелся. Вообще не получилось проинициализировать.
Стал гуглить. Первоe, что нашел - вот это. Все прояснилось. Навернулся тот самый сенсор, который предназначен для спасения/выравнивания. Проблема, похоже, достаточно массовая.
В качестве радикального решения раньше предлагалось просто откатиться на Pro версию, где этот сенсор не используется.
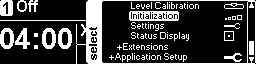
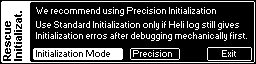
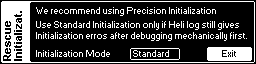
В прошивке 6.2 рекомендуется инициализировать вертолет хвостом вверх. При этом будет задействован второй альтернативный датчик. Не помогло. Оказывается, что потом альтернативная инициализация была встроена в настройки - картинки 3, 4, 5. После этого инициализация проходит успешно, только тарелка в конце дергается не один, а три раза. Ну и логах появляется два сообшения с кодом 94 и 93.
Зарядился, пошел опять на поляну, отлетал 5 паков и сегодня еще 5. Никаких проблем нет, спасалка работает и в начале полета, и в конце.
Да, по поводу последней строчки на второй картинке. Это я попробовал спасалку (в руках, естественно) при мигающем красным V. На вид все отработало как надо. Предполагаю, что оно проинициализировалось на втором сенсоре. А режим Standard в настройках просто отключает ругань на сбой первого. Standard - вот ведь как назвали, гады. Типа все нормально, а режим Precision получается уже как бы бонус.
Видно не просто так микада поставила второй дублирующий сенсор, да и еще другого производителя. Я так понял, что он менее точный и может накопиться ошибка.
Хотя, все равно неприятно. Полетаю еще, понаблюдаю. Эта ФБЛ стоит на X3, уронить, если что, не так страшно. А там буду думать - жаловаться или нет. Этот Neo был куплен в марте, время еще есть.
Алексей , писать в “редакцию” по любому надо !
…Хотя бы для профилактики , чтоб жизненный тонус не теряли .
Напишу, но хочу подготовиться. Почитаю темы типа вот этой, чтобы понимать, какие могут быть аргументы и предложения с той стороны.
Кто-нибудь знает что такое Collective Balance и как его использовать?
Для борьбы с делифином. Вот тут написано.
Adjustment for the Anti Ballooning System. Use lower values for Helis with high collective ranges and vice versa. (only with NEO available)
Для борьбы с делифином. Вот тут написано.
Не совсем так , скорее с торможением - при “смешивании” коллективного шага и циклического.
Collective Balance - это ограничение коллективного шага при большом циклическом шаге .
Вообщем фича для того, чтобы во время интенсивного 3D руления или полёта на скорость , не "смешивать"шаги и избежать срыва потока …
Можно понаблюдать как это работает и сразу станет понятно что да как :
Выкручиваем шкалу на минимум 10. Отклоняем стик элерона (элеватора) до упора и начинаем двигать стик коллективного шага , тоже до упора . Мы увидим , что тарелка по коллективу вверх-вниз перемещается с маленькой амплитудой .
Потом выкручиваем шкалу на максимум 50 . Опять отклоняем стик элерона до упора и двигаеи коллективный шаг … Тарелка двигается с большей амплитудой.
Т.е. чем больше у нас коллективный шаг , тем меньше ставим значение . Далее идем летать ,злостно раздираем ручки и смотрим как комфортнее…
"ВспуКчивание " - это звук и обычно с просадкой оборотов , который издают лопасти при смешивании обоих шагов .😃
Не совсем так , скорее с торможением - при “смешивании” коллективного шага и циклического.
Collective Balance - это ограничение коллективного шага при большом циклическом шаге .
Вообщем фича для того, чтобы во время интенсивного 3D руления или полёта на скорость , не "смешивать"шаги и избежать срыва потока …
Можно понаблюдать как это работает и сразу станет понятно что да как :
Выкручиваем шкалу на минимум 10. Отклоняем стик элерона (элеватора) до упора и начинаем двигать стик коллективного шага , тоже до упора . Мы увидим , что тарелка по коллективу вверх-вниз перемещается с маленькой амплитудой .Потом выкручиваем шкалу на максимум 50 . Опять отклоняем стик элерона до упора и двигаеи коллективный шаг … Тарелка двигается с большей амплитудой.
Т.е. чем больше у нас коллективный шаг , тем меньше ставим значение . Далее идем летать ,злостно раздираем ручки и смотрим как комфортнее…
"ВспуКчивание " - это звук и обычно с просадкой оборотов , который издают лопасти при смешивании обоих шагов .
Сколько лучше ставить %, если у меня колект. ± 13.5 и до появления этой функции все было OK?
50% если я правильно понял…
50% если я правильно понял…
чем больше у нас коллективный шаг , тем меньше ставим значение
50% по мнению Микадо, соответствует 8гр. коллектива.
Ваши 13.5гр. будут соответствовать примерно 27-30.
Вообще , конкретной цифры нет и не может быть , она может изменяться относительно разных факторов : лопасти , экспонента , падл-симуляция… моторики пальцев рук в конце концов .
интересная история про сенсор. При этом я так понимаю, что микадо использует микросхему, аналогичную MPU6050. А стало быть, эти проблемы могут быть у всех, кто этот чип использует ( если это действительно чип виноват, конечно ).
А стало быть, эти проблемы могут быть у всех, кто этот чип использует
Возможно по этой причине Спирит расфигачил новый вертолёт …
Да, я читал эту историю. Вообще, как разработчик я сталкивался со следующим:
диагностику ошибок люди воспринимают очень неоднозначно. Возможно поэтому производители по моим наблюдениям пытаются работать “до последнего” и “не парить мозг юзеру”.
Т.е. есть 2 подхода
- все параноидально проверять и если что - сразу останавливать работу.
- работать пока работает.
Где - то между этими двумя подходами есть компромисс, который резонирует с наибольшим числом пользователей…
Collective Balance - это ограничение коллективного шага при большом циклическом шаге .
На спартане примерно так же работал cyclic ring ( а на брайне, кстати, он работает иначе ). Но здесь есть один гнусненький нюанс: Я сегодня тренил вертикальную восьмерку и обнаружил, что в фазах подъема я даю полный коллективный шаг и довольно большой циклик ( и ходовая, кстати, в такие моменты работает практически на пределе ). Если лететь вверх - это еще ничего, но если лететь вниз и элеватор вдруг “отупеет” - это будет очень неприятно.
Это другое . К циклу этот параметр отношения не имеет . Циклический шаг будет такой , какой требует Rates++.
Collective Balance - будет уменьшать ТОЛЬКО коллективный шаг !
CR- сглаживает “угловатость” диагоналей стика.
Уважаемые пользователи Vbar NEO подскажите пожалуйста можно ли эту систему использовать со стандартным приемником ? Интересует возможность использования с приёмником HITEC.
Ну так у них, вроде написано что нет, только цифрА:
“Are analog inputs with standard receivers supported?
No. We support digital inputs like the protocols from V5 and spektrum satellites only.”
Можно, но вот с таким приемником:hitecrcd.com/products/…/product
Можно, но вот с таким приемником:hitecrcd.com/products/…/product
А для этого приемника нужна АВРОРА 9Х или просто 9-я тоже подойдёт?
Любая подойдет.