Автопилот Arduplane - открытое ПО

Вот мои параметры OSD:
OSD_CHAN,7
OSD_FS_SCR,1
OSD_SW_METHOD,1
OSD1_CHAN_MAX,1200
OSD1_CHAN_MIN,980
OSD2_CHAN_MAX,1600
OSD2_CHAN_MIN,1201
OSD3_CHAN_MAX,2100
OSD3_CHAN_MIN,1601
Экраны переключает по значению PWM на 7 канале, приемник настроен на NoPulse при FS…
У меня прописано вкруговую переключение экранов одним двухпозиционным тумблером (нет свободного 3х позиционника).
Думал что раз у АП наступил FS значит он наступил для всего и для OSD в том числе.
Если действительно баг, может имеет смысл написать разработчикам?
Вечером попробую как у меня будет себя вести после смены метода переключения…
Вечером попробую как у меня будет себя вести после смены метода переключения…
Буду благодарен.
Попробовал все значения OSD_SW_METHOD, отрабатывает как положено, при FS включает первый экран из любого положения…
Вот мои настройки:


Имеет-ли значение уровня управляющего канала (в моём случае 6го) при наступлении FS?
Имеет-ли значение уровня управляющего канала (в моём случае 6го) при наступлении FS?
Вот это не знаю, надо проверять. Я у себя только проверил что при выключении аппаратуры, ни один канал да же не шелохается на экране калибровки аппаратуры. т.е. значения остаются такими как были до отключения.
А у Вас какая аппаратура и точно ли полетник видит именно FS, а не просто переключение в RTL?
Ну переключение в RTL с чего-то должно наступать? Думаю что оно наступает при FS.
У мня лора.
Если Лора через полетник идет то не факт что передаются значения каналов. Надо напрямую к Лоре этот канал включать и в настройках FS лоры значение прописать.
RTL можно включить как режим, просто запрограммировав режим FS на приемнике на фиксированое значение канала управляющего режимами. И тогда полетник не будет знать что приемник в режиме FS. А можно настроить полетник и приемник так, что сам полетник будет знать про FS. В этом режиме у ардупилота есть две фазы, при их наступлении идут соответствующие сообщения в MavLink. Если полетник видит FS, то при появлении связи, режим останется RTL пока вы вручную его не переключите.
Тогда перепишу в приемнике лоры значение канала газа при FS и попробую.
RTL можно включить как режим, просто запрограммировав режим FS на приемнике на фиксированое значение канала управляющего режимами. И тогда полетник не будет знать что приемник в режиме FS. А можно настроить полетник и приемник так, что сам полетник будет знать про FS. В этом режиме у ардупилота есть две фазы, при их наступлении идут соответствующие сообщения в MavLink. Если полетник видит FS, то при появлении связи, режим останется RTL пока вы вручную его не переключите.
У некоторых полетников подключенных по SBUS передается флаг FS и ему пофиг что в остальных каналах какие-то значения. Т е приходится напрямую миную полетник к приемнику подключаться…
Все абсолютно верно, поэтому выгодно настраивать правильно, через ФС. Он не выйдет в мануал просто по появлению связи и не угробит борт.
Тогда перепишу в приемнике лоры значение канала газа при FS и попробую.
И это правильно! Значение газа ставьте минимально возможное. После этого проверьте с подключенным MP, активирует ли полетник именно режим FS, а не просто переключается в RTL. Ну и естественно не забывайте настроить поведение борта в режиме FS, там есть несколько вариантов развития событий.
Спасибо, это я в курсе ещё со времён АРМ.
О, а подскажите ещё:
были раньше статусные светодиоды для АРМ, но их поддержка прекратилась ещё до версии 3.4.0
Откопал у себя такую штуку: www.amazon.com/…/B00U4XZPP8
Их так и нельзя прицепить?
И если можно то как это сделать с платой Omnibus F4 pro V3?
Я статус снимаю ардуиной через чтение МавЛинка. Иначе никак.
Их так и нельзя прицепить?
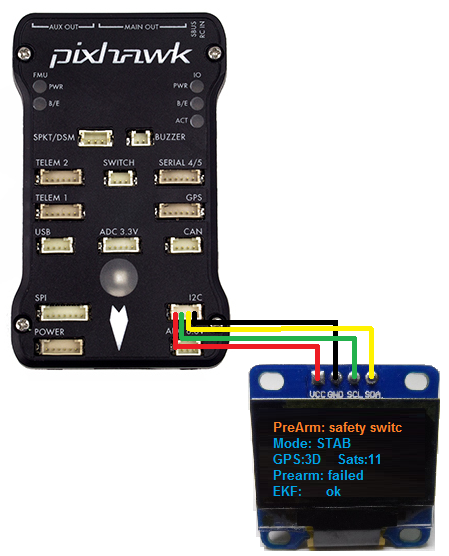
светодиодный семафор - стало крайне не информативно для современных прошивок. появилась масса предполетных проверок в частности число спутников достаточно ли, контроль вольтажа батареи, адекватность компаса и масса других сообщений.
для этого всего в i2c можно воткнуть и настроить компактный легкий и достаточно дешевый олед дисплей
У всех при перепрошивке и восстановления настроек из сохранённого файла корректно восстанавливается только первый экран OSD?
Перешивался на 4.0.0 и была такая проблема, сегодня перешился на 4.0.1 и то-же самое.
И настройки RSSI не подтянулись… 😦
У всех при перепрошивке и восстановления настроек из сохранённого файла корректно восстанавливается только первый экран OSD?
Перешивался на 4.0.0 и была такая проблема, сегодня перешился на 4.0.1 и то-же самое.
И настройки RSSI не подтянулись… 😦
У меня телеметрия перестала работать (поковыряю еще). Пришлось откатываться на 3,9
Можно ли подключить внешний датчик температуры с отображением на ОСД?
Кому удалось побороть воблинг?
Заметил, что чем больше вес, тем больше модель мандрагонит. При этом трясучка может пропадать когда летишь в повороте, или по ветру.
При занижении P на треть (как советуют) - осцилляции остаются, но становятся более медленными и амплитудными. Другие параметры (I и D) на решение вопроса не заметил, чтобы влияли в лучшую сторону. Может, конечно, что-то недокрутил…
С центровкой тоже играл, сервы пробовал разные, и медленные и быстрые.
Подскажите, куда копать? Это ведь стандартный ПИД-регулятор, тогда почему с Inav так различается результат?
Три борта, от 1.1метра до 2 метров, 1.3 кг. до 7.3 кг.
Чем больше, тем стабильнее. Автопилот АПМ.
Автотюн прошел успешно?