Автопилот Arduplane - открытое ПО

. так, что такая посадка в мануале это 100% сваливание.
Что и требуется от модели.
В момент изготовления модели за советом по постройке обратился к своим украинским коллегам, мало кто проникся смыслом данной посадки, сперва даже подумали, что юмор такой.
Модель должна садится так:
Страшновато, но эффективно.
Видео еще одного самолета управляемого пиксхавком:
Ну смотря какие поверхности, если закрылки то возможно, а все остальное никак ведь и тангаж выдерживать надо и крен.
Из поверхностей есть только киль да руль высоты, классическая “таймерка”.
Просто интересно, изготовители самолетика с последнего видео сажают в ручную, или “обманывают” автопилот в параметрах в параметрах Landing.
del)
Просто интересно, изготовители самолетика с последнего видео сажают в ручную, или “обманывают” автопилот в параметрах в параметрах Landing.
Мне интересно, они вал на моторе после каждой посадки меняют?
почему не работает gps на арм 2.5 . Даже родной поставил и тот не работает.
надо заходить на посадку на скорости а последний метр “парашютированием” при этом он и горизонтальную скорость погасит и приземлится без пробега и вертикальную не успеет набрать
почему не работает gps на арм 2.5 . Даже родной поставил и тот не работает.
А лампочка светится? Вообще поподробней надо расписывать.
на самом gps горит зеленый типа спутники есть.
на самом gps горит зеленый типа спутники есть.
нее… когда спутники есть горит синий. Куда подключал?
Мне интересно, они вал на моторе после каждой посадки меняют?
есть моторы у которых юбка ротора имеет подшипник, к примеру Scorpion SII-3032:

надо заходить на посадку на скорости а последний метр “парашютированием” при этом он и горизонтальную скорость погасит и приземлится без пробега и вертикальную не успеет набрать
заход на посадку может длится более 100м с таким крылом, не везде можно позволить такую посадку, скорость гасится плохо, нагрузка на крыло не велика (так пока и пытаюсь садить, но в ручную, не осмелел для автомата)
и для такой посадки надо прикупить сонар
Просто интересно, изготовители самолетика с последнего видео сажают в ручную, или “обманывают” автопилот в параметрах в параметрах Landing.
Да в принципе че АРМ обманывать, максимальную скорость снижения задираем, минимальную ARSP снижаем и вуаля. Проблема мне кажется в другом- модель при такой посадке должна крутить штопор ( а задирание руля высоты на себя только ускорит процесс). Положение рулевых плоскостей при такой скорости практически не имеет значения. Тут скорее всего весь фокус в чудовищном V крыла из за которого самик в принципе не может свалиться
в моей прошивки небыло поддержки nmea. Скачал спец прошивку для квадрика все заработало. А ктонибуть подскажите прошивки для самолета и машинки с поддержкой nmea. И вообше зачем убирать nmea неврубаюсь. что за история такая.
народ с какой прошивки отключен протокол nmea?
народ с какой прошивки отключен протокол nmea?
пост # 8505
20 мая 2015 года вышла прошивка ардуплан 3.3.0
… не влез сервоподвес стабилизации камеры и исключили поддержку NMEA жпс-глонасс модулей.
а вот поддержку NMEA и модулей с префиксами стандарта глонасс мне удалось уместить в своей сборке
Тут скорее всего весь фокус в чудовищном V крыла из за которого самик в принципе не может свалиться
Все можно свалить, главное правильно уложить, штопорит чудно.
mission planner speech English only? Я так понимаю надо ковырнуть виндовый синтезатор речи?
Заставил я говорить мишин планнер “понятным” языком, установил пакет eSpeak.
Может скорость выше круиза, нос то хоть держит ?
Мотор гасит, слегка наклоняет нос вниз и планирует к какой-то своей низкой высоте. Дотерпел до 2 метров, затем Manual и резко вверх.
Что и в FBWB никаких вопросов, летает как часики?
Да, летает на высоте нужной.
Думаю надо листы настроек приложить и сравнить))
Енто что? Та “портянка” настроек?
ЗЫ
Меня точка на фото смущает. Осталась после экспериментов с GeoFence. Никак не убирается. В config/tuning делал Reset to Default (кстати, эта кнопка сбрасывает только настройки или делает аппаратный сброс APM? На аппаратный не очень то похоже, точка остается. Как делать аппаратный сброс? Терминала то нет уже.)
Не летит ли APM к этой точке на 0 высоте?
Эта точка похожа на какой-то “ручной” Home. Где бы APM точку домашнюю при включении не создавал, эта точка всегда там, где оставил (ее можно по карте таскать мышкой).
Может МП переустановить?
Меня точка на фото смущает. Осталась после экспериментов с GeoFence. Никак не убирается.
У меня аналогичная ситуация. В принципе после получения ЖПС координат автоматически перемещается к месту старта. Видимо ее оставляют специально…и она символизирует возможно …домашнюю точку как ее понимает АРМ… он же не знает сбой по питанию или воще полеты закончились, временно прервалась модемная связь или модем отключен до следующих полетушек. Поэтому и бережно хранит “houm” там где он ее полседний раз зафиксировал. При новом включении точка появляется в месте старта.
Остальные точки от ограды я снес записывая в АП нулевые точки для ограды…
ребята подскажите где в МП посмотреть какое ограничение стоит по дальности полета, тоесть типо барьера чтоли какогото по достижению его самолет летит обратно на хоме, и второй вопрос по полетам по точкам, например самолет пролетел 5 точек которые я запраграмировал то после выполнения он на дом политит и в круг встанет или он что делать будет, если есть где почитат на рус языке дайте ссылку плиз.
кстати и по высоте тоже есть ограничение где? если есть буду признателен где глянуть.
Поэтому и бережно хранит “houm” там где он ее полседний раз зафиксировал.
В том то и дело, что всегда эту точку хранит. Где бы “хоум” не фиксировал.
Попробую прошить старые прошивки, где терминал работает и через терминал делать “сброс к заводским настройкам”.
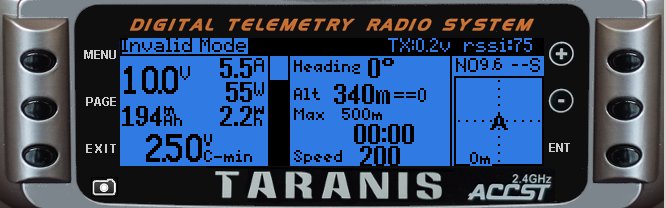
Для владельцев Frsky Taranis с приемником x8r.
Спаял сегодня приблуду. Берет Mavlink (который на MinimOSD идет), кодирует его, сует в Smart Port приемника x8r, дальше приемник отдает телеметрию на передатчик.
В итоге имеем на экране передатчика всякие координаты GPS, напряжения, токи, израсходованные мАч, направление носа самолета, дистанция до него и проч.
Опять же передатчик голосом говорит полетный режим (мануал, лойтер, …)
Стоимость проекта = стоимости платы Arduino Pro mini (200 руб.)
Если строить на Teensy 3.1 (1800 руб.) то просто будет больше проговариваемых параметров (в Arduino Pro памяти поменьше).
Проект тут
github.com/wolkstein/…/s-c-l-v-rc-opentx2.1
Думаю это сработает и для обладателей Turnigy с прошивкой OpenTX модулями от FrSky, а так же обладателей не XJT модулей, а DJT (там решения проще, можно поискать в инете).
А у кого Pixhawk, так вообще лафа
copter.ardupilot.com/…/common-frsky-telemetry/
Ребята скажите кто в курсе, калибрую компас на скае v6, кручу его верчу, потом МП останавливается, вылетает табличка с какимито цифрами, и это все? получается он откалибровался?
Бинго 😃
вылетает табличка с какимито цифрами, и это все?
Если циферки не слишком большие, то да.