Skywalker FPV

видимо все подразумевают “дальнолёт”
Пока было озвучено время, про дальность полёта ничего.
Пока ещё ни один конвертоплан не смог сравниться по времени и дальности с FPV носителями как мотопланер или коптер.
Таких игрушек полно в разделе “Другое”. Если из Skywalker сделать конвертоплан, он мало будет чем отличатся от других, “выше головы не прыгнет”.
Пока ещё ни один конвертоплан не смог сравниться по времени и дальности с FPV носителями как мотопланер или коптер.
Я уточню. Конвертоплан не смог сранится по времени и дальности полета с коптером ?
Конвертоплан не смог сранится по времени и дальности полета с коптером ?
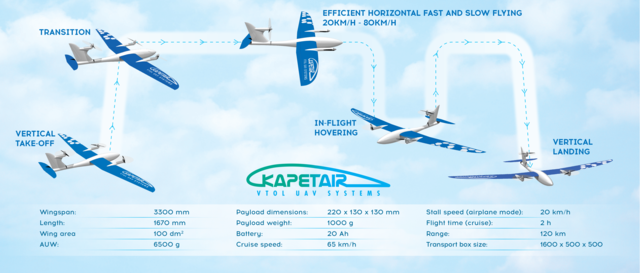
Лень искать достижения на коптерах (не по теме), а так для сравнения размеры, вес и время полёта ( как понял максимальный полёт без вертикального взлёта и посадки). также обратите внимание на площадь крыла (нагрузка 65гр/дм2).
С таким полётным весом квадрокоптеры уже летаю дольше.
В теме было озвучено о переделке Skywalker 168 размахом и желание летать долго (согласились на 2 часа). Была ссылка на конвертоплан 180см, полёт до часа.
Получается как не считай, продолжительность полёта конвертоплана будет в первую очередь зависеть от нагрузки на крыло.
Большая часть крыла самолету в полете только мешает
Что, простите??? 😃
С таким полётным весом квадрокоптеры уже летаю дольше.
Что что? 😃 “С таким полётным весом квадрокоптеры уже летаю дольше” 2 часов? Огогошеньки! А можно посмотреть в лицо такому квадрокоптеру? 😃
А я вот думаю а зачем конвертоплану режим висения ? Если только для взлета и посадки то зачем делать поворотные ВМУ ?
Для модели ведь “положение кресла пилота” на висении не важно в отличие от настоящего Пусть и висит вертикально фюзеляжем. По сути обычный двухмоторник с разнонаправленными винтами и рулением самыми обычными рулями в потоке винтов по всем каналам. H образное хвостовое оперение и элероны за винтами. Только надо не полагаться на 3Д умения пилота а надо автоматизировать процесс висения.
По сути обычный двухмоторник с разнонаправленными винтами и рулением самыми обычными рулями в потоке винтов по всем каналам
ArduPilot вроде умеет их
ArduPilot вроде умеет их
Да, представил сейчас как вместо желтенького крыла, Skywalker будет висеть.
Skywalker будет висеть.
В 3,5 кило и снимает небо ))))
А я вот думаю а зачем конвертоплану режим висения ?
Хе, странный вопрос. Нафига нужен конвертоплан, который не зависает блинчиком.
Да, представил сейчас как вместо желтенького крыла, Skywalker будет висеть.
да в общем то пофиг почти. Так как в трехмоторном варианте все равно вся нагрузка почти на передние моторы будет.
Не смог понять про векторное управление
Vectored Yaw
Vectored yaw aircraft tilt the left and right rotors separately to control yaw in hover. This reduces mechanical complexity in tilt-tricopters as it avoids the need for a tilt servo for the rear motor for yaw control.
To setup a vectored yaw aircraft you need to set Q_TILT_TYPE=2, and also set Q_TILT_YAW_ANGLE to the angle in degrees that the tilt motors can go up past 90 degrees.
For example, if you have a tilt-tricopter with vectored yaw, and your motors can tilt through a total of 110 degrees from forward flight, then your Q_TILT_YAW_ANGLE would be 20, as that is the angle past 90 degrees that the tilt mechanism can go.
You also need to setup your two tilt servos with SERVOn_FUNCTION=75 for left tilt and SERVOn_FUNCTION=76 for right tilt.
Не смог понять про векторное управление
в классическом трикоптере задний мотор должен уметь наклоняться в стороны. Там для этого серва стоит. В случае конвертоплана, если моторы сервами поворачиваются в режим коптера и моут повернуться не только на 90 градусов, а например на 110, то это избвит от необходимости в серве вращающей хвсотовой мотор (не та что ставит его вертикально, а та что на коптерах наклоняет его в стороны).
На картинке стандартное устройство хвостового мотора трикоптера

в классическом трикоптере задний мотор должен уметь наклоняться в стороны. Там для этого серва стоит. В случае конвертоплана, если моторы сервами поворачиваются в режим коптера и моут повернуться не только на 90 градусов, а например на 110, то это избвит от необходимости в серве вращающей хвсотовой мотор (не та что ставит его вертикально, а та что на коптерах наклоняет его в стороны).
Да, это я понимаю. А сервы обычные подойдут?
Да, это я понимаю. А сервы обычные подойдут?
Ну у обычных серв угол поворота больше 90 градусов, так что пойдут
90 градусов, а например на 110
В том что и фокус что нет. Там обычнве 90 градусные сервы. Он рулит по YAV в одну сторону одним мотром в другую другим в обоих случаях отклоняя их “вперед”.
Там обычнве 90 градусные сервы
обычные не 90 градусные.
>> can go up past 90 degree
Я перевожу как “поворачиваться более чем на 90”. Тут я может и не совсем прав, формулировка у них мозголомная.
Он рулит по YAV в одну сторону одним мотром в другую другим в обоих случаях отклоняя их “вперед”.
А как он компенсирует хвостовой мотор ? Все время летит вперед для компенсации ?
А как он компенсирует хвостовой мотор ? Все время летит вперед для компенсации ?
скольжением. В висении хвостовй мотор повернут тоже вверх.
Vectored yaw aircraft tilt the left and right rotors separately to control yaw in hover. This reduces mechanical complexity in tilt-tricopters as it avoids the need for a tilt servo for the rear motor for yaw control.
Не совсем дословно - векторное управление наклоняет левый и правый мотор для управлния по YAV во время висения. Это уменьшает сложносить механики и не требует сервы наклона для хвостового ротора.
Серва поворота остается.
Серва поворота остается.
серва поворота в вертикальное положние остается, но не нужна серва для поворотов хвостового мотора в стороны.
Ну и тогда ваш вариант перевода примера прошу " a total of 110 degrees from forward flight".
For example, if you have a tilt-tricopter with vectored yaw, and your motors can tilt through a total of 110 degrees from forward flight, then your Q_TILT_YAW_ANGLE would be 20, as that is the angle past 90 degrees that the tilt mechanism can go.
Например если у вас конвертоплан и ваши моторы могут повернутся на 110 градусов от горизонтального полета ваш your Q_TILT_YAW_ANGLE должен быть 20 т.е угол после 90 градусов на который механизм может повернутся.
Т.е не “обязательно” а “может”. Впрочем спор ниочем - большиство серв действительно ходят больше 90 градусов.
серва поворота в вертикальное положние остается, но не нужна серва для поворотов хвостового мотора в стороны.
да
А я вот думаю а зачем конвертоплану режим висения ? Если только для взлета и посадки то зачем делать поворотные ВМУ ?
H образное хвостовое оперение и элероны за винтами. Только надо не полагаться на 3Д умения пилота а надо автоматизировать процесс висения.
Называется это дело переход из 1го режима полёта во 2ой, и обратно. Когда кривая потребной тяги проходит через V наивыгоднейшую. Переходный процесс самый сложный.
Покрутил свой Skywalker и так и сяк, думаю может вместо консоли на киль, просто удлинить родной мотормаунт. Но тогда не понятно как переход в гориз. полёт будет происходить.
Но тогда не понятно как переход в гориз. полёт будет происходить.
Аналогично, только мотор будет “вниз” смотреть в режиме висения.