MultiWii на самолете

Для коптеров туда выводится стабилизация камерой. Возможно, что для самолета туда идет то же самое…
На счет вывести AUX3-AUX4 точно не скажу… Возможно, если покопаться в коде, то можно и это сделать…
Вообще лучше это спроить в теме о MultiWii в разделе по коптерам. Там много знающих людей - подскажут 😃
Multiwii Mini Flight Controller w/FTDI Interface
кто на таком летает?
кто на таком летает?
Вчера затестил MultiWii Crius Lite Mini на Цессне. Все полетело с первого раза на стоковых пидах. Арминга вроде нет. Прошивку ставил последнюю MultiWii dev version r1342 (20130214)
Но чуть подправил код:
void servos2Neutral() {
#ifdef TRI
servo[5] = 1500; // we center the yaw servo in conf mode
writeServos();
#endif
#ifdef FLYING_WING
servo[0] = conf.wing_left_mid;
servo[1] = conf.wing_right_mid;
writeServos();
#endif
#ifdef AIRPLANE
int8_t i;
for(i = 4; i<7 ;i++) servo[i] = 1500;
writeServos();
#endif
#ifdef HELICOPTER
servo[5] = YAW_CENTER;
servo[3] = servo[4] = servo[6] = 1500;
writeServos();
#endif
}
Дальше буду пробовать ставить баро и жпс и настраивать возврат домой

Попробовал залить на Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560).
Настроил датчики и конфиг на крыло. На земле вроде как все ок.
Остался вопрос как крутить PID ?
А какие сейчас настройки?
I и D я вообще не трогал. Про P - писал выше.
Хотя вообще на стоковых пидах должно лететь нормально.
Если будут осциляции - уменьшать P.
На земле вроде как все ок.
проверь во всех режимах: на гирах и акселях
ПИДы по-умолчанию
Подскажите чайнику, а режимы там как то переключаются или один какой то для самолетов работает ?
По умолчанию чувствительность гироскопов большая.
Спасло только #define GYRO_SMOOTHING {10, 10, 3}
Без этого реагирует даже на шевеление сервы.
Подкручивание PID результатов не давало.
В Гуи надо назначить включение режимов на тумблера. HORIZON - задействован аксель. Если выключен режим, то летит на гирах. PASSTHRU вроде отключает управление вием полностью. Включенный режим подсвечивается зеленым. Надо проверить правильность отрабатывания серв с включенным HORIZON и выключенным. Самолет должен компенсировать наклоны. Если сервы работают неправильно, то надо изменить ориентацию для гиры или для акселя в коде.
Всем спасибо !!!
Разобрался с настройками, до этого ни разу не имел дело с платами и контроллерами.
Проверил в полете. Все в принципе ОК. Есть одна проблема.
Прошивка не знает и соответственно не учитывает влияние рулевых поверхностей на разных скоростях.
Бросил на режиме HORIZON куда глаза глядят. Подхватило, выровняло красота.
Но при наборе скорости вошло в колбасу по тангажу и разрушилось 😃
Прошивка не знает и соответственно не учитывает влияние рулевых поверхностей на разных скоростях.
В gui есть параметр TPA . Когда он равен 0 то пиды идут без изменений . Если равен 100 то при максимальном газе пиды будут равны 0. Ну и соответственно при 50 при максимальном газе пиды уменьшатся на 50 процентов.
Собрал все обратно, уменьшил пиды.
Летает ровно, строго как бомбер. Без стаба сразу падает (центровка задняя).
Можно рекомендовать на летающие крылья, у кого есть проблемы со взлетом.
Бросил и летит. Еще бы научить держать высоту самостоятельно.
Тримируйте аксель и будет держать высоту и горизонт
у меня крыло летаю с eagle tree, а гардиана небыло пришлось поставить multi wii как стабилизацию, налетал часа 3 без проблем и высоту и горизонт держит ручки бросал сам летит по высоте не проваливается включал только гирик и аксель
летал на стоковых пидах прошивка 2,1 с оф сайта
Нууу не то, что бы высоту держит. Держит горизонт который выставишь. А там как повезет.
Часа два потратил на выяснение как работают разные режимы MULTIWIIя
Angle and horizon делают одно и тоже. Если есть запас высоты можно бросать модель как попало. Выровняет и полетит.
Кидал носом вверх с моста 5м на малом газу. Кувыркнулось и полетело. Буду прововать вертикальный взлет на малом газу.
В режиме BARO высоту не держит, а ведет как режим акро на многороторниках.
Пробовал включать стаб после бочек с выходом на вертикаль и вращением.
Аксели приходят в себя секунды через 3. До этого пытаются поставить самолет либо носом вверх либо вниз.
Проблема…в режиме PASSTHRU расходы больно резкие. Пришлось настраивать разные расходы на разные режимы.
Подцепил GPS, правда что он делает пока не понятно.
Вопрос есть прошивка для E-OSD под мультивий ?
А с crius AllInOne 1.1, крылышко без проблем сконфигурилось? Залил версию 2.1 - в Гуи горизонт как положено отображается, а сервы повернуты на 90 градусов. По крену отрабатывают как тангаж, а тангаж как крен. Не правили output.ino ?
В config.h Есть настройки, описывают куда двигать сервы для крена и тангажа.
*********************** Flying Wing ***********************/
/* you can change change servo orientation and servo min/max values here
valid for all flight modes, even passThrough mode
need to setup servo directions here; no need to swap servos amongst channels at rx */
#define PITCH_DIRECTION_L 1 // left servo - pitch orientation
#define PITCH_DIRECTION_R -1 // right servo - pitch orientation (opposite sign to PITCH_DIRECTION_L, if servos are mounted in mirrored orientation)
#define ROLL_DIRECTION_L 1 // left servo - roll orientation
#define ROLL_DIRECTION_R 1 // right servo - roll orientation (same sign as ROLL_DIRECTION_L, if servos are mounted in mirrored orientation)
Тоже собрал и установил самолет. Но у меня отдельно ардуина и отдельно блок иму. Уставноил для эксперимента на цессну 150, полетная масса 540 грамм, центровка передняя. Вытаскивает самолет в горизонт при ветре 6 м.с
Ветер отключает полностью. Ощущения дикие, щенячий восторг был вначале 😃 Стоковые пиды, прошивка 2.1. Единственно что пришлось найти правильную ориентацию иму. Но так как иму у меня отдельно на 4 проводах это не проблема.
Тоже собрал и установил самолет. Но у меня отдельно ардуина и отдельно блок иму. Уставноил для эксперимента на цессну 150, полетная масса 540 грамм, центровка передняя. Вытаскивает самолет в горизонт при ветре 6 м.с
Ветер отключает полностью. Ощущения дикие, щенячий восторг был вначале 😃 Стоковые пиды, прошивка 2.1. Единственно что пришлось найти правильную ориентацию иму. Но так как иму у меня отдельно на 4 проводах это не проблема.
А можно подробней какая ардуина? Что за блок ИМУ. Где его купить вытащить и ссылку на проект спасибо… И если не трудно пару слов подробней фото и схема подключения…
Ардуина вот такая
Иму вот такая.
Использую стоковую 2.1 , работает с частичным использованием акселя, а в основном на гирах. В планах дождаться миним осд и собрать все в кучу.
Хариер на цессне - 😉 смотрится диком, но самолет только завлеи в хариер и бросили пульт. Мультивии держал его сам.
Схема подключения дана в первом посте ветки. Фото пока дать не могу. Единственно что я сделал это выставил инверт серв и подключил канал газа минуя плату, потому что воевать с армингом не есть хорошо на самолете.
По личным ощущениям вещь получилась отличная, учитывая возможность вывести авиагоризонт в осд и теоретически рабочий режим “RTH” вещь будет очень отличная для меня.
Если кому понадобится менять реверсы серв для стабилизации, вот последовательность
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {1, 2, 3, 4, ROLL, YAW, PITCH, 8}
Спасибо за ответ! А могу я например использовать вот такую плату hobbyking.com/…/__27033__MultiWii_328P_Flight_Cont… И почему вы выбрали отдельную плату иму? Чем вы руководствовались. Судя по цене иму экономить вы не пытались. Значит ваша конфигурация с отдельной палтой иму чем-то лучше. Можете объяснить в чем плюсы и в чем разница?
Спасибо за ответ! А могу я например использовать вот такую плату hobbyking.com/…/__27033__MultiWii_328P_Flight_Cont… И почему вы выбрали отдельную плату иму? Чем вы руководствовались. Судя по цене иму экономить вы не пытались. Значит ваша конфигурация с отдельной палтой иму чем-то лучше. Можете объяснить в чем плюсы и в чем разница?
Хоббикинговская плата ничем не плоха. Просто я хотел чтобы блок иму я мог закрепить где мне удобнее. А готовую плату мультивии тяжелее разместить правильно и по горизонту, в отличии от маленького блока иму. По цене все выходит дороже, но не настолько чтобы совсем, а в плане размещения, и удобства настроек все в разы приятнее. единственное что пришлось городить кучу проводов. Но это пока тестовая версия, на ней все обкатаем и будет разводить и заказывать единую печатную плату, с осд и гпс модулем на борту.
Изначально я для себя делаю осд с авиагоризонтом и простенькой стабилизацией. по цене выйдет мои блоки + цена гпс + цена миним осд. Будет чуть дороже чем покупная, но даст мне свободу настройки и подгонки под себя.
Если кому понадобится менять реверсы серв для стабилизации, вот последовательность
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {1, 2, 3, 4, ROLL, YAW, PITCH, 8}
Каналы идут немного по другому, согласно картинке в первом посту
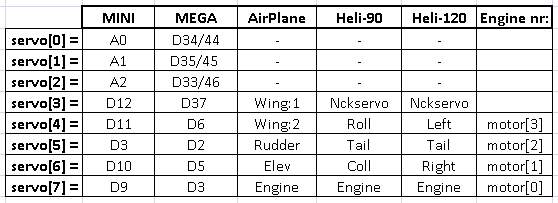
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {0, 1, 2, WING1, Wing2, Rudder, Elev, THR}
опять же конечно в зависимости от того какой тип носителя вы выбрали, в прошивке 2,1 я выбрал airplane
Единственное на что стоит очень сильно обращать внимание, канал газа должен идти напрямую на регулятор. Точнее через игрек кабель, с приемника зайти в мультивии и парралельно уйти на регулятор. Иначе с армингом будет тяжело.