PitLab FPV System: OSD+Autopilot+Ground station

опять какой то дурной спор ради спора…
Низкий центр тяжести.
о каком НИЗКОМ центре тяжести идёт речь когда трекер хоть от Питлаба хоть от MFD стоит на штативе, при высоте конструкции в 1700мм будет играть роль 100мм?
Поворотная серва 360 градусов, что не создаёт повышенных нагрузок при перекидывании антенны на другую сторону.
Питлаб так же позволяет работать с сервой 360 градусов
Провода не закручиваются и ни за что не цепляются.
Да, согласен, но для реализации “не закручивания” нужно или засунуть на антенну и батарею, и приёмник и расшифровывающую сигнал для наземки электронику, а это вес и вся эта херь будет повышать ЦТ всей конструкции и способствовать к переворачиванию… Если всего этого не делать, нужен тот же Slip ring а это дополнительные затраты… сложность реализации конструкции и в домашних условиях при отсутствии доступа к промышленным инструментам решится сделать такую же конструкцию смогут единицы…
А ещё в этой наземке есть компас.
да, это удобно, почти… не хочу вдаваться в подробности, эта тема о Питлабе, но какое отношение к устойчивости конструкции имеет компас?
Это далеко не всё. Нужно быть глубоко убеждённым фанатом питлаба, чтобы не увидеть приемуществ. Их масса. Другое дело-где взять такую же конструкцию для использования с питлабом, ибо питлабовская конструкция и не сказать, что сильно дешёвая и не то, чтобы удобная в эксплуатации.
Не надо меня обвинять в фанатизме к Питлабу, разговор изначально о конструкции поворотного механизма, ни о деньгах за которые можно это сделать, хотя конечно mfd стоит как крыло от Боинга и сам ты не желаешь повторить этот механизм ручками, по тому что понимаешь - сложно… ни о электронике и ни о дополнительных фичах вроде компаса…
У Питлаба это простая повторяемая вещь, которую можно сгородить из фанеры на коленке и пользоваться… И именно режим 180 градусов с перекидыванием антенны делает её простой, повторяемой…
Да, есть и недостатки, как и у любой другой системы…
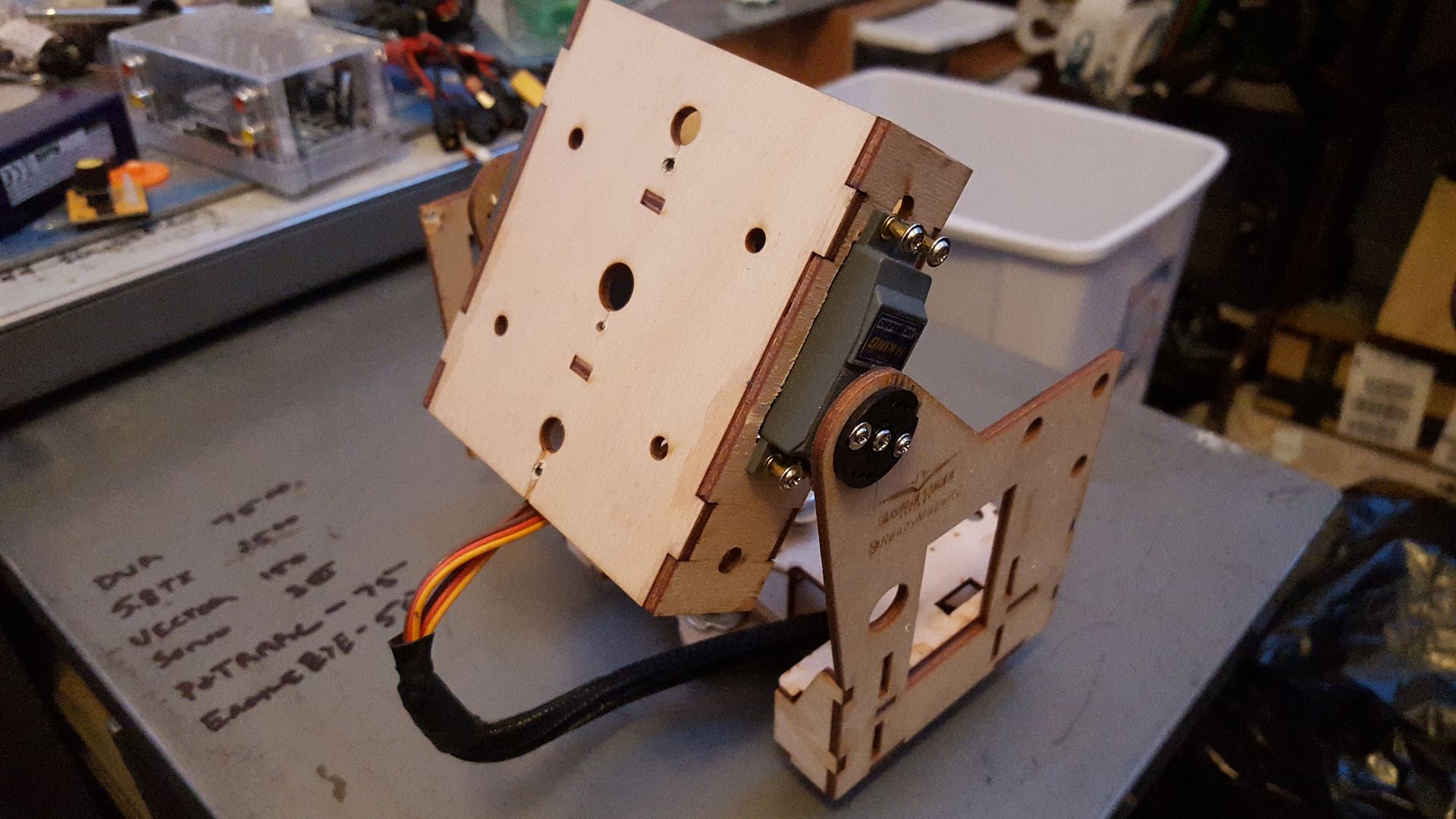
Если по существу, нормальная конструкция с противовесом, замедление в настройках поворотки дают очень неплохой результат с тяжелыми антеннами… Хорошо сбалансированная антенна переворачивается легко и без сильных нагрузок! (на картинке виден балансировочный груз)

С простыми типа Харченко, Патч и подобными это работает замечательно без дополнительных противовесов…
Тяжёлая антенна, значительно поднятая над точкой крепления механизма трекера к штативу, создаёт нехилый рычаг, который при порыве ветра способен на всё.

Такая конструкция выглядит не сильно сложнее. Ищу что-то типа такого в CAD виде, чтобы нарезать на ЧПУ. Может есть у кого чертежи?
Кстати, какой тип 360-градусных серв нужен для работы питлабовской наземки? Как я понял - они бывают разные.
Тяжёлая антенна, значительно поднятая над точкой крепления механизма трекера к штативу, создаёт нехилый рычаг, который при порыве ветра способен на всё.
в данном ракурсе mfd ничуть не лучше а даже хуже… Если ставить на неё ту же Ягу килограмма на три, там противовес как у Пита в центре не поставишь…
Такая антенна требует от mfd вынести её и противовес за пределы центра устойчивости
Такая конструкция выглядит не сильно сложнее. Ищу что-то типа такого в CAD виде, чтобы нарезать на ЧПУ. Может есть у кого чертежи?
а чем она лучше, картинка маленькая, видно плохо?
по моему принцип такой же как у Пита
наверное это попытка сделать нечто подобное
READYMADE RC ANTENNA PAN/TILT
Кстати, какой тип 360-градусных серв нужен для работы питлабовской наземки? Как я понял - они бывают разные.
я никогда не пробовал, по этому не знаю, а в чём конкретно они бывают разные?
Ну если уж говорить о недостатках - MFDшный трекер больше для панельных антенн. Противовес там ставить некуда, да и незачем. ЕГо роль выполняет пружина, работающая на сжатие.
Лучше тем, что она 360-градусная, т.е. факт опрокидывания антенны на другую сторону отсутствует как факт. На позапрошлых выходных такое опрокидывание стоило мне вылетевшую конструкцию антенны и упавшую на землю из казалось бы крепкого зажима.
Сань, ну не должна отбалансированная антенна падать… Явно у тебя нет противовеса…
ты говорить про 360 градусов про трекер на твоей картинке?
Явно у тебя нет противовеса…
Его нет. Боюсь вешать на этот трекер ещё хоть что-то. Даже с самой медленной скоростью рывок такой, что страшно рядом стоять 😁
ты говорить про 360 градусов про трекер на твоей картинке?
Я хочу найти чертежи такого же, чтобы запилить трекер как у mfd/eagle под свою 15dbi панель.
Касательно того, чем отличаются 360-градусные сервы - как я понял есть те, коnорые continous rotation и те, у которых просто диапазон 500-2500us расширен для оборота на 180 градусов от центра в каждую сторону. Я ошибаюсь?
Ха! Похоже нифига не continous rotation
а как в cлучае полёта самолёта над базой работает mfd ?
Касательно того, чем отличаются 360-градусные сервы - как я понял есть те, коnорые continous rotation и те, у которых просто диапазон 500-2500us расширен для оборота на 180 градусов от центра в каждую сторону. Я ошибаюсь?
Как мне кажется нет таких серв которые крутятся как моторчик на все 360 гр с регулировкой скорости. Обычно их делают из обычной сервы со снятым потенциометром, а вместо него впаивают два резистора . На MFD именно такие стоят (Футаба).
Ха! Похоже нифига не continous rotation
а как в cлучае полёта самолёта над базой работает mfd ?
Просто следит за самолётом куда бы не летел.
По идее continuous rotation без доп. потенциометра, должен как-то хитро калиброваться.
Просто следит за самолётом куда бы не летел.
т.е. она может сделать и 10 и 20 оборотов подряд?
Да.
Да.
тогда там явно какая то другая серва, в отличии той что на видео…
Собственно в этом и вопрос - какую из всех 360-градусных серв ожидают разработчики питлаба?
Собственно в этом и вопрос - какую из всех 360-градусных серв ожидают разработчики питлаба?
судя по видео, с расширением до 360 градусов…
вольный гуглоперевод из оригинальной темы
GS не работают с сервоприводами с полным непрерывным вращением. Он работает с сервоприводами с обратной связью и контролируемым / ограниченным диапазоном поворота. Некоторые сервомоторы Hitec имеют несколько оборотов, но все же они контролируют положение и ограничивают количество оборотов.
Калибровка довольно проста. Вам нужно открыть страницу настроек (гаечный ключ), выбрать подходящий тип 180/180 или 90/360, а затем выбрать Servo azim ( и Servo elev на след шаге) и с помощью соответствующих кнопок <и> отрегулировать позиции сервопривода.
:/
а как в cлучае полёта самолёта над базой работает mfd ?
просто у неё нет ограничений на накручивание кругов
тогда там явно какая то другая серва, в отличии той что на видео…
крутятся как моторчик на все 360 гр с регулировкой скорости. Обычно их делают из обычной сервы со снятым потенциометром, а вместо него впаивают два резистора . На MFD именно такие стоят (Футаба).
крутятся на разной скорости как обычный мотор
тогда там явно какая то другая серва, в отличии той что на видео…
как писал Олег снят переменный резистор и заменен на два постоянных
просто у неё нет ограничений на накручивание кругов
И, видимо, за счёт компаса она и узнаёт на сколько повернулась. В противном случае, без обратной связи, узнать это нельзя.
Что ж майфлайдрим умер…Вот бы они сделали енкодер телеметрии как у скайларка - 2 на 1см - цены бы этой поворотке небыло. А так енкодер размером с плату питлаба. Далеко не в каждый самолёт он влезет.
Кстати, в поворотке питлаба есть i2c. Сделали б поддержку компаса и можно было бы ставить полноценную 360-градусную серву.
Ладно, оплакали поворотку. Бог с ней.
Другой вопрос. Новое крыло в авто режиме как-то всё время прыгает +/- пару метров. В мануале летит ровно. Микс на руль высоты пробовал разный - от 30 до 70%. Как тюнить? Постоянное раскручивание мотора требует энергии заметно больше, чем вращение на постоянной скорости.
как писал Олег снят переменный резистор и заменен на два постоянных
Думаю не все так просто…
При таком подходе невозможно без дополнительных усилий отследить на сколько повернулась антенна…
Ладно, оплакали поворотку. Бог с ней.
Другой вопрос. Новое крыло в авто режиме как-то всё время прыгает +/- пару метров. В мануале летит ровно. Микс на руль высоты пробовал разный - от 30 до 70%. Как тюнить? Постоянное раскручивание мотора требует энергии заметно больше, чем вращение на постоянной скорости.
Тюнить параметром стабилизации по питчу, простым или расширенным.
Про компас в наземку я задавал вопрос, обещали подумать…
Не нравится постоянное раскручивание, поставь режим газа - постоянный
И, видимо, за счёт компаса она и узнаёт на сколько повернулась.
Так и есть. Поворотка MFD знает свое местоположение за счет своего жпс (или борта по желанию) , компас понимает направление. С борта идут данные о жпс по аналогии радара на ОСД, зная это поворотка поворачивается в ту сторону по команде драйвера . А угол Подъема рассчитывается (заложен программно)по удалению и высоте с жпс с борта.