Новый автопилот от фирмы Feiyu Tech

А чего вы не летаете на новой прошивки осд 1.20. ?
Кстати я попросил их инженера сделать выбор расположении скорости баро и жпс , сказал рассмотрят этот вариант, мне не очень нравится что скорость воздушная на шкале, а Gps скорость в правом угле, лучше наоборот или рядом расположить их на шкале.
Ребят, а как осуществляется отслеживание полета в реальном времени не этом автопилоте? Там же нет наземной станции. Что-то не догоняю…
Через модем…можно купить у них или сторонние разработки…где то в теме писали про это
В реальном времени у тебя раньше должно отваливаться РУ, а картинка сохраняться - вот и следи куда оно там рулит.
Так ведь это вряд ли, сначало картинка как правило гаснет
У меня картинка бьет существенно дальше РУ, и потребовало это меньше возни - 1Вт Лавмейт + большой патч.
Мои два лавмейта тоже бьют хорошо, но не всегда. Наверное, помехи. Недавно в Астаханской обл залетел за стену тростника высотой 4 м (мы на лодке стояли прямо у ней), так картинка угасла, а управление осталось. Грешу на бустер 3 ВТ, может он помеху дает на видео. Но там была высота 20-30 м, удаление где-то 1500 м. Да и Патч был направлен в другую сторону, на втором приемнике штырь.
Не надо летать низко и далеко, это и при правильно выставленных антеннах чревато потерей сигнала.
Новая прошивка для 41. Ура. Вот изменения. Если кто может переведите “правильно” а то вроде как понятно но не совсем дословно.
- Fixed the problem with the attitude calculation that magnetic interference will affect the attitude calculation.
- Optimize the stabilization control for navigation.
- Increase the operation of recording the servo neutral and the neutral attitude on the ground. If you want to do this recording operation, you need to according to the following steps to complete. ( 1 ) Plane stay on the ground, adjust the plane to the level flying attitude, remember the plane keep static. ( 2 ) Use the remote control fine-tuning adjust the rudder surface to leveling under the RC mode. ( 3 ) Switch from ABM mode to RC mode 8 times, it can finishes the record operation and save the parameter forever automatic. The LED light from white to green,also the aileron have a tilt action and then go back to level, this will prompt the record is success.
- Optimize the use of UBLOX GPS.
- Improved the climbing throttle which control by altitude and the speed, avoid the possible which underspeed in climbing.
- Adjust the protection control when the GPS speed is too low.
- In the navigation mode, the remote control rocker can not control the plane any more(Except Fixed altitude & Heading lock mode).
- Protection altitude of Auto Return To Launch Mode have been set to 50m.
- Auto Return to home,if the altitude more than 100 m,the plane will descend to 100m automatic.
Новая прошивка для 41.
Блин, хорошие нововведения и защитная высота и снижение в авто режиме, а для ДОСа ничего не подкинули?
Обещали в конце лета сделать на 41 и Досе. Возможно появится и на Досе скоро.
Новая прошивка для 41. Ура
Не знаю, стоит ли радоваться…
7. In the navigation mode, the remote control rocker can not control the plane any more(Except Fixed altitude & Heading lock mode).
и с автоснижением …пусть лучше возвращается к базе на своей высоте и только потом снижается , к примеру, достигнув радиуса кружения…а то хрен знает, как он будет снижаться и самое главное - это черевато полной потерей видеолинка (улетели на 10 км и автовозврат…не уверен, что видеолинк на такой высоте не пропадет)
Пусть пользователь задает высоту снижения сам!!! Или автоснижение при подлете к радиусу кружения. Опять все через жопу!!!
4. Optimize the use of UBLOX GPS. все таки косячки были…тогда столько времени убил и телег им накатал…
Леша, чем твоя душенька не довольна? ))) Автоснижение сделали, пусть снижается, или ты боишься что он сильно снижаться начнет?
Что интересно, так это защита высоты 50м, супер, если будет падать отключите аппу и самолет перейдет в RTL и не упадет ниже 50м , будет подруливать рулем высоты, как это было и хорошо работала в 31. У меня правда при посадке отлетела отключился бустер (штекер) и самолет поддал газу и ушел на взлет сам)) на высоту 50м и крутился надомной пока я копался с бустером. ))
Далее по прошивке 1,20 для 41. Вроде как сделали запоминание тримиров самолета.
Так же сделали более продвинутое управление газа, теперь пишут что может на подъем идти легче или спускаться.
Вообщем Спасибо .
Автоснижение сделали, пусть снижается
ой душенька не спокона…
улетели на 10 км и автовозврат…не уверен, что видеолинк на такой высоте не пропадет
Подскажите приобрел себе трекер Skykark, есть схема подключения к FY-31, там используют 3 провода от GPS на FY-41 четыре провода, я думаю нужно использовать зеленый провод и два питания, куда девать желтый и за, что он отвечает.
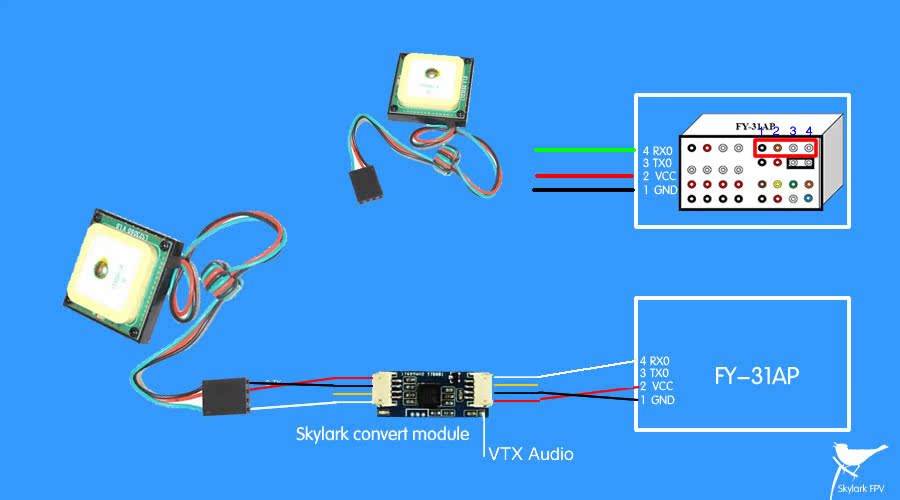
есть схема подключения к FY-31
С трудом понял Ваш вопрос. Вы хоть между предложениями ставьте точки!
Распайка GPS антенны на 41АП:
GPS-RXD:Connect to GPS module TX port.
GPS-TXD:Connect to GPS module RX port. Не используется.
VCC:+5V output port.
GND:GND output port.
Защита высоты 50м по ходу не работает в новой прошивке. В ГКС 5,1 там опять стоит 0м. При установке 50м при повторном подключении слетает.
50м при повторном подключении слетает.
Это всё Алексей виноват. Сглазил! Он так и сказал:
Опять все через жопу!!!
Это всё Алексей виноват
не, это у Китайцев все с права на лево…блин, сейчас общаюсь с Asmile, так там хотя бы тебя понимают и делают по просьбе, а тут писать устал - все по ихнему…
GPS-TXD:Connect to GPS module RX port. Не используется.
еще как используется - его нужно подключать! Фишка гонит в гпс модуль конфу при инициализации.
еще как используется - его нужно подключать!
Лёш, к GPS антенне припаян ленточный провод в три жилы. Шина TX port не используется.
Ты лучше скажи, если подключить TX port, что изменится? Я, как пользователь это почувствую?
общаюсь с Asmile
кто это?
Эта его любовница из южной Кореи