reptile s800 sky shadow

В результате токи немного возросли, скорость - нет
Сетап s800 весом 454 г без аккума (был на 11 г легче, но пришлось приклеить две 5-рублёвых монетки на концах плоскостей для смещения центровки назад), мотор BR2205 2300 kV проп 5045BN, аккум 4s весом 153 г. Интереса ради попробовал проп 6040 - максималка не изменилась (порядка 100-105 км/ч без снижения), но “крейсерский газ” уменьшился с 50% до 40%. Видимо, что в моём что в вашем случае сетап “упёрся” в соотношение лобового сопротивления и мощности двигателя.
[quote=AlexeyStn;7443443]
при автозапуске крыло еле-еле разгоняется и набирает высоту. Выходит, пропы с более широкими лопастями и меньшим шагом оказываются эффективнее на крыле?
По моему опыту пропеллер с большим шагом и узкими лопастями хорошо работает только “на скорости”, я ставил на квадр трёшки DAL T5051C, и у них заметно мало тяги в области малого газа, подхватывать коптер из паверлупа и т.п. приходилось намного резче в сравнении с трёшками HQ5048.
Имеется Рептилия 670, вес 435г
На s800 летали? Интересует сравнение по “ветрозависимости” и посадочной скорости. Подумываю о компактном разборном сетапе на тушке S670 (да и Мобиус в хозяйстве имеется), но, если у неё посадочная скорость будет под 50 против 30 у s800 - ХЗ с какого расстояния мне придётся заводить её на “глиссаду”. На s800 захожу метров за 100+ на высоте метров 12-15, включаю angle и планирую с выключенным мотором.
На s800 летали? Интересует сравнение по “ветрозависимости” и посадочной скорости. Подумываю о компактном разборном сетапе на тушке S670.
S800 не пробовал. S670 - моё первое и пока единственное крыло, сравнивать особо не с чем, разве что с коптерами, они ветроустойчивее многократно 😁.
Скорость при касании земли около 40 км/ч, иногда чуть ниже. Возможно, приноровившись, научусь сажать медленнее. Я только на этих выходных сделал свой первый вылет на крыле с FPV, до этого только визуально летал.
S800 не пробовал. S670 - моё первое и пока единственное крыло, сравнивать особо не с чем, разве что с коптерами, они ветроустойчивее многократно
Ясно, жаль. С коптерами, понятно, и сравнивать нечего, в акро там и 17-20 м/с практически пофиг, машинально скомпенсировал креном да и забыл, на управление не влияет.
Скорость при касании земли около 40 км/ч, иногда чуть ниже.
Ага, ну то есть на треть быстрее s800, но, в принципе, терпимо.
Я только на этих выходных сделал свой первый вылет на крыле с FPV, до этого только визуально летал.
Уважаю! Я визуально вряд ли нормально крыло посажу - по FPV это сделать куда проще, ты видишь куда летишь. Ну и “право-лево” местами не меняются как при визуальной посадке “на себя”.
Уважаю! Я визуально вряд ли нормально крыло посажу - по FPV это сделать куда проще, ты видишь куда летишь.
Вы не подумайте, что я без автопилота визуально летаю. Angle в iNav прощает многие ошибки, право-лево не страшно путать, когда самолёт сам выравнивается. Без опасений можно много раз уходить на второй круг, пока наконец не попадёшь на полосу ровно и не научишься рулить на себя.
Не уверен, кстати, что есть смысл делать 670-ю рептилию разборной. Я свою склеил. Толстый фюзеляж и торчащие винглеты всё равно не позволяют компактно сложить её в рюкзак. Но даже в собранном виде она реально маленькая, вожу её в транспорте в тряпичной сумке, куда она влезает почти полностью. С велосипедом, правда, пока не придумал, как быть.
но пришлось приклеить две 5-рублёвых монетки на концах плоскостей для смещения центровки назад),
В смысле??А почему не в отсек регуля?
Я визуально вряд ли нормально крыло посажу - по FPV это сделать куда проще, ты видишь куда летишь.
Ну не всем…я хоть и новичок -но стараюсь визуально садить.С посадкой по камере… расстояние…высота… как то сложно…Все таки эт не в живую глядеть с крыла.На гоночных дрончиках тоже подлетаю -переход в хэрайзэн из акро -скидываю очки -и сажусь. 😃 Видать пока не судьба.
В смысле??

А почему не в отсек регуля?
А потому что больше расстояние (в продольном направлении модели) от центра тяжести, то есть больше рычаг - соответственно, можно обойтись меньшей массой грузиков.
Ну не всем…я хоть и новичок -но стараюсь визуально садить.С посадкой по камере… расстояние…высота… как то сложно…Все таки эт не в живую глядеть с крыла.На гоночных дрончиках тоже подлетаю -переход в хэрайзэн из акро -скидываю очки -и сажусь.
Ну, видимо, кому как - мне что в симуляторе в разы проще в режиме “вида с бортовой камеры” и рулить и сажать что в реале. На скорость и высоту смотрю только для “общего развития” - сажусь именно по картинке “в живую с крыла”. Хотя понимаю, что надо натренировать “посадку в визуале” на случай отказа FPV - по RTH крыло обратно-то прилетит, но будет кружить на высоте 100 м, а дальше уже сам. Режим land, понятно, не рассматриваю (точнее, настроен RTH+LAND для FS - то есть на случай полного отказа р/у), так как будет садиться наобум и во что-нибудь врежется. А на гоночных дронах всегда сажусь по FPV кроме случая его отказа - когда-то переходил из acro в angle перед посадкой, но сейчас лишь отключаю airmod, тем самым включая motor_stop (в CF и BF airmod отключает motor_stop, а в iNAV - нет) для удобства посадки. А так - в acro от взлёта до посадки. На крыле - взлёт, понятно, в стабе (так как автоланч = angle), основной полётный режим acro (если штиль - можно и в manual-е), посадка - планирование в angle.
Толстый фюзеляж и торчащие винглеты всё равно не позволяют компактно сложить её в рюкзак.
Нужно прикинуть, конечно, но мне казалось, что, сложив крыло к крылу винглетами в одну сторону и положив “тушку” с верхней стороны крыла - получится достаточно компактный “бутерброд”.
Angle в iNav прощает многие ошибки, право-лево не страшно путать, когда самолёт сам выравнивается. Без опасений можно много раз уходить на второй круг, пока наконец не попадёшь на полосу ровно и не научишься рулить на себя.
Значит буду тренироваться - вплоть до посадки из положения “прилетел по RTH”, то есть из круга над головой на высоте 100 м.
можно обойтись меньшей массой грузиков.
Ага, всё-таки три грамма сэкономили…)))))
Ага, всё-таки три грамма сэкономили…)))))
Если это намёк на ваше предложение отказаться от бочонков, то там вес ушел бы из задней половины крыла, а её и так догружать надо, если рассчитывать центровку под стоящие спереди HD-камеру и курсовую. Причём в роли курсовой у меня пока HS1177 в штатном лёгком корпусе, есть мысль поменять её на Predator - а у него корпус усесистый. Соответственно, опять придётся хвост догружать, нагоняя общий вес.
Существуют более рациональные мероприятия для регулировки ЦТ без установки дополнительных грузов, как то - перераспределение масс, облегчение конструции, подбор веса комплектующих.
А вообще вы чересчур заморачиваетесь, ваш пятак - как мертвому припарка, рояли вообще не сыграет.
Тоже самое касается и вашего слишком срупулезного подхода к регулировке тяг.
Хотя, я и сам от похожих вещей получаю кайф: на последнем крыле я сильно заморочился на снижении полетного веса. Тоже тема ещё та… (оттуда и такое пристрастие к граммам…)
ваш пятак - как мертвому припарка, рояли вообще не сыграет.
Вы ошибаетесь - эти ДВА пятака (по одному на крыло, в сумме 11 г) сместили ЦТ ровно туда, куда мне требовалось, переведя “слегка переднюю” центровку в “слегка заднюю”.
Существуют более рациональные мероприятия для регулировки ЦТ без установки дополнительных грузов, как то - перераспределение масс, облегчение конструции, подбор веса комплектующих.
Крыло было собрано из имеющихся в наличии комплектующих - покупались лишь тушка да сервы.
- Смещать аккумулятор внутри канопы особо некуда - разве что менять его местами с электроникой, но в задней части канопа имеет мЕньшую высоту, потому 4s туда уже однозначно не влезет - в общем, ещё и аккумы заново покупать плюс жертвовать запасом тяги.
- Можно вынести мотор на стойках, но добавочный вес (вторая моторама, 4 стойки и 8 болтов) выйдет такой же, как и от двух пятаков, если не больше.
- Можно поставить более тяжёлый и мощный мотор - но на максимальную скорость это сильно не повлияет (выше обсуждали), а общую массу увеличит больше, чем “два пятака”, так как мотор расположен куда ближе к ЦТ чем места крепления “пятаков”.
Так что, как ни крути, вариант с пятаками оказывается самым простым и эффективным. Кстати, надо поискать а автомагазинах свинцовые грузики на самоклейке для балансировки колёс - вроде, там есть 5-граммовые. Получится совсем компактно и незаметно.
P.S. Исключение курсовой камеры (использование видеовыхода со съёмочной) я не рассматриваю, так как не всегда летаю с HD-камерой, да и картинка с её видеовыхода откровенно хуже (даже с GoPro). Вариант с переходом на Runcam Split - недёшево, HD-видео потеряет в качестве. Кроме того, для курсовой и съёмочной зачастую требуются РАЗНЫЕ настройки - в курсовой важна “читабельность” картинки, а в съёмочной “естественность” цветопередачи.
свинцовые грузики
Зайдите в любой шиномонтаж, там вам за так насыплют
Если говорить о Рептилии, то вот таких клипс хватает:
А вот такой тип крепления к кабанчику не убивает ли “обоих зайцев” - и малое трение в кабанчике и возможность регулировки?
Тоже вариант.
У меня на первой рептилии стояли шаровые наконечники с резьбой под тягу. Не дает люфтов и есть возможность регулировки. Но в борьбе за вес на второй рептилии я от них отказался.
Ребят, если рептилия на крыло валится(без разницы какое) это я так понимаю задняя центровка ?
И еще вопрос, у кого какой угол у элеронов установлен ?
если рептилия на крыло валится(без разницы какое)
Очень неподробно
у кого какой угол у элеронов установлен ?
Страницей выше писал порядок установки и калибровки
Ребят, если рептилия на крыло валится(без разницы какое) это я так понимаю задняя центровка ?
На какое крыло? Заднее? 😃
А CG проверили между плоскостями? ( а не только перед- зад).Летаем без пк? Если вешали передаван видео в крыло -прикинули противопол. вес для компенсации??
А вообще чтоб это крыло полетело ( без тонкой посл. доводки) надо его установить на передний болт регуля -и добиться отсутствия крена -вперед назад и лево-право.( причем с полным полет. весом -винтом…крышкой и акумом).
Поднять на 5 мм элевоны -и в небо.
Когда-то давно летал на фальконе. Вот оно было неуправляемое при неправильной центровке,и наровило в штопор сорваться.Было это лет пять назад…
Щас вот решил опять крылом обзавестись.Ну и приобрел рептилию.Контроллер матек стр,видео в одном крыле,ГПС в другом.Проболвал сначала за крыло закидывать,в мануале.Получилось раза с пятого)Пока вспоминал как это делать,отвалился мотор,благо скотч под рукой был,заклеил.И в небо.Стаб не включал,ТК хочу механически оттримировать плоскости сначала.Посему и спрашивал про угол и центровку.Пока эксперименты остановил,ибо приемыш с Банга RX82DA похоже глючный,аппаратура на секунду теряет телеметрию.Ну а валится на небольшой скорости.
Проболвал сначала за крыло закидывать,в мануале.
Автоланч, типа, для слабаков? Ну-ну, птичку-то пожалейте! 😉
Стаб не включал,ТК хочу механически оттримировать плоскости сначала.
Ну и напрасно - намного проще сделать наоборот. Говорю же - почитайте мой пост внизу предыдущей страницы.
Ну а валится на небольшой скорости.
При правильной центровке - прекрасно планирует на 30 км/ч с выключенным мотором.
Вот тут: архив в pdf.
Ну а где резать элевоны и как и куда ставить кабанчики - это азы… Начинать надо с азов - с чтения ветки для новичков и всяких FAQов. Никто же не допустит к вождению новичка в автошколе, пока тот не пройдет теорию. И тут так же.
PS Без обид. 😃
Извините, забыл ответить тогда, пошел пересматривать то, что читал на эту тему.
Первая модель. FAQ много прочитано, но не увидел конкретных рекомендаций по допустимому углу между тягой и плоскостью движения тяги со стороны сервы (и со стороны кабанчика тоже). И на готовых и на самодельных моделях делают и с довольно приличными углами (~ где-нибудь поболее 10 градусов).
На Рептилии чем меньше “перекоса”, тем ближе к краю элевона.
Да не, я без обид. Если бы ссылкой кинулись, то я бы вообще был очень рад.
Ну а по теме - я свой разбил. Потеря сигнала за деревьями. На такой скорости, пока таранис произносил “рси сигнал лоу”, он стал уже “критикал”, а файлсейв настроить забыл. 😃
Жду запчасти, т.к. ровно склеить не получилось. 😃
Непруха.
То есть оно так и улетело после потери сигнала прямо с включенным мотором?
Автоланч, типа, для слабаков? Ну-ну, птичку-то пожалейте! 😉
А автоланч корректно сможет отработать на не отриммированном крыле с пидами по умолчанию?
Я пробовал в эти выходные новый самолетик ненастроенный в воздух с автозапуском поднять - не вышло. Пару раз попробовал и до триммирования и автонастройки пидов запускал руками.
После (авто)настройки все хорошо запускается и с автозапуском.
но не увидел конкретных рекомендаций по допустимому углу между тягой и плоскостью движения тяги со стороны сервы (и со стороны кабанчика тоже)
Честно говоря заморачиваться этим смысла нет. Углы обычно зависят от назначения модели. На всяких 3D - градусов под 45-50, на пилотажках - что-то около 30, на скоростных моделях - градусов 10-15. Я всегда на пульте ставлю несколько разных расходов. Начинаю со средних, потом переключаю и гляжу где что поправить. Это все индивидуально по большому счету, как и экспоненты. Главное чтобы отверстия в кабанчике было точно по петлям, чтобы были одинаковые отклонения вверх и вниз. Как тут кто-то писал - можно тяги по движению, а не под углом. Хотя особо смысла в этом не вижу - тяга проходит по области низкого давления и влияние ее уже не так критично…
То есть оно так и улетело после потери сигнала прямо с включенным мотором?
Да. Причем я еще до последнего наблюдал картинку “со снегом” чудесного приземления мордой в землю. 😃
Стояла камера сяоми. Запись оборвалась до втыкания в планету - видимо пишет целыми блоками. Последний блок уже не скинулся… А так хотел посмотреть. 😃
А автоланч корректно сможет отработать на не отриммированном крыле с пидами по умолчанию?
Автоланч - это angle (стаб) плюс заданная тяга мотора. По моему опыту, на неоттриммированном крыле прекрасно отрабатывают все “стабилизированные” режимы, включая acro (это ж стабилизация “произвольно заданной плоскости”, а angle - её частный случай, когда плоскость перпендикулярна к направлению на центр Земли) - главное, чтобы хватило хода элевонов (при установке тяг “по Юлиану” ни фига не хватает - я ставил в оба верхних отверстия что на серве что на кабанчике) для компенсации “неоттриммированности”. Единственный режим, критичный к триммированию - это manual (passthru), потому начинать настройку именно с него смысла мало, в остальных режимах оно и так полетит.
Ненастроенные пиффы тоже не сильно критичны - либо воблинг дадут либо “сонное” управление. В принципе, можно ещё до авто-трима прогнать авто-тюн (кстати, он стартует с заниженных пиффов и поначалу даст “сонное” управление) - и через несколько энергичных качаний по роллу-питчу пиффы станут “вменяемыми”. Только не забудьте их сохранить после посадки, они автоматом не сохраняются - в общем, доки в руки и почитайте описание авто-тюна.
Ну и ещё я для автоланча:
- уменьшил паузу до запуска двигателя до 200 мс - по пальцам один фиг ударить не успеет (пока он там задетектит бросок), зато криво брошенное крыло будет раньше “подхватываться”
- добавил угол тангажа автоланча со стоковых 18 до 25 градусов - движок BR2205 2300kV с пропеллером 5045BN на аккуме 4s на 70% газа “вывозит” влёгкую.
После запуска обычно лечу не в стабе, а в акро - даже при неотюстированном положении полётника, когда в angle самолёт уводит по крену или по тангажу, а acrо вполне спокойно можно летать и садиться по FPV.
И обязательно проверять центровку! Неверная центровка (как по питчу так и по роллу) будет серьёзной помехой как автоланчу так и полёту до настройки.
Вопросик общего плана.
Кто пользуется сайтом www.windy.com ?
Какой ветер для вас допустим чтоб выйти полетать…настроить модель?
Живу на краю пустыни и практич. всегда дует с утра 7…8 м/с. А к 12 полудня - уже 12…13 м/c с порывам до 23м/c.
Какой ветер приемлем для полетушек для вас?
Иль для таких легких крыл это запредельно и болтанкак будет еще та?
Какой ветер приемлем для полетушек для вас?
Сегодня как раз тестил самостоятельно скомпонованные пиффы - с утра пораньше, пока (согласно прогнозу) ветер не раскачался. Но, по факту, во время полётов (с 8:15 до 11:00) было вот так:
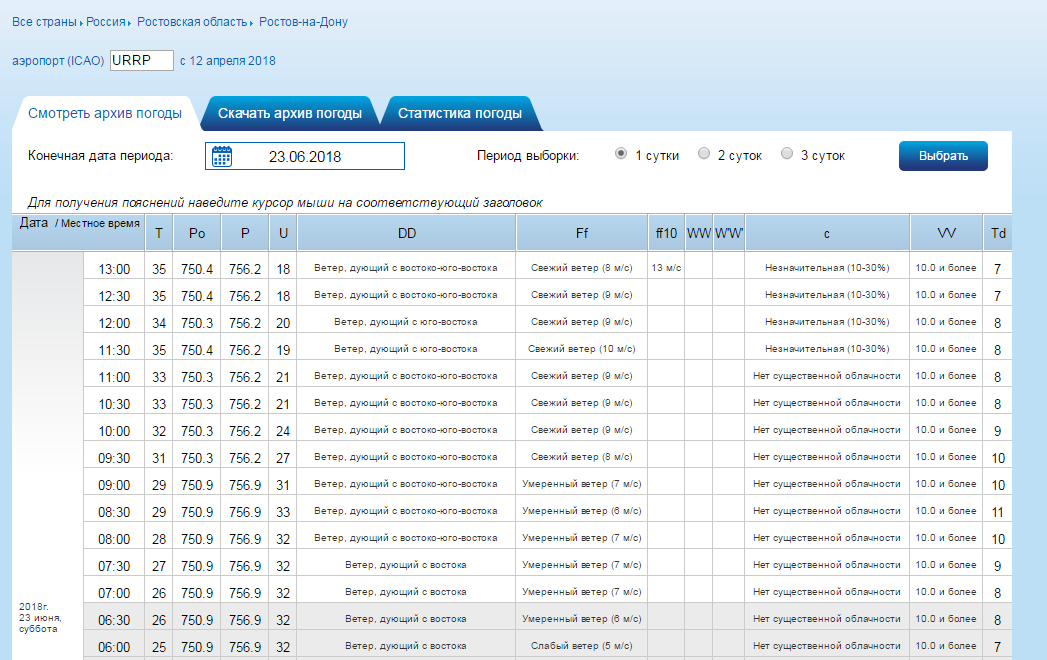
Перед запуском ветер пытался крыло из руки выдернуть - рептилию же держать толком не за что. Однако, автоланч отрабатывал штатно - со встречным ветром крыло даже шустрее вверх уходило, без просадки после броска. В полёте, конечно, потряхивало временами (в основном на разворотах, когда ветер был сбоку), но всё вполне рулилось даже в мануале - хотя в акро, конечно, комфортнее. А вот в стабе раскачки было куда больше - надо бы пид стабилизации увеличить, но в OSD-меню 1.8 я его, как ни странно, не нашёл. Автотрим тоже вполне реально было проделать - при полёте ровно навстречу ветру. Посадка тоже без особых проблем (правда, у нас трава, а не пустыня) - при встречном ветре крыло неохотно идёт вниз даже с выключенным мотором, приходится питч-стиком “запихивать”.
Иль для таких легких крыл это запредельно и болтанкак будет еще та?
По сегодняшнему опыту, болтанку можно существенно снизить подбором пиффов (точнее, P и I, а FF трогать не надо). Правда, это потребует либо частых циклов взлёт-посадка либо вывода пиффов ролла-питча на OSD и настройки их изменения по свободному каналу.
настройки их изменения по свободному каналу.
Собсно, мануал для настойки вот: github.com/iNavFlight/…/Inflight Adjustments.md
На таранисе x9d для этого прекрасно подошли боковые слайдеры (LS и RS) плюс свободный тумблер (итого 3 канала) - слайдерами меняю значения по отдельности для ролла и питча, а тумблером выбираю между корректировкой P и I.
Соратники…Продублирую вопрос тут.
Кто то может утверждать что от малых коптерных регулей ( типа блхелли) больше помех по видео чем от больших регулей типа симонка?
Мож ктото пробывал и видел ощутимую разницу?(щас стоит маленький блхелли)
Ставил доп. low esr на маленький регуль…-ни черта не помогает…Полосы хоть убей…И пробывал по питанию…и на фильтрацию камеры…
Уж доп. плата питания для омнибаса ф3.Передаван от отд. бека на 12в.Отд.бек 5 в -для камеры.( плата матек) Сервы -от отдельного 5в.
Граунды пробовал и так и так…
Он зараза хоть умри -полосы и все…
Уж не знаю…неужто панасоники 1800Мкф на 25в lowesr туда пихать?