Чем соосный вертолёт лучше обычного?

Чем соосный вертолёт лучше обычного?
Ничем.
Соосник не летает в ветер, ему нужен полный штиль. И скорость у него маааааааленькая:) Единственный его плюс - стабильность. Висит сам.
Но и новые верты классической схемы имеют режим автостабилизации (WLtoys V977, например). Так что у соосников нет преимуществ перед классикой.
А кто сказал, что лучше? Если речь идёт о пилотажных моделях, то я очень хотел бы увидеть соосник, который хотя бы петлю спокойно выполняет.
На ютубе есть ролики чехов с их соосным проектом и они петли летали.
Посмотри обсуждение здесь www.rcgroups.com/forums/showthread.php?t=2048342
Там много ссылок на проекты и есть обсуждение некоторых проблем.
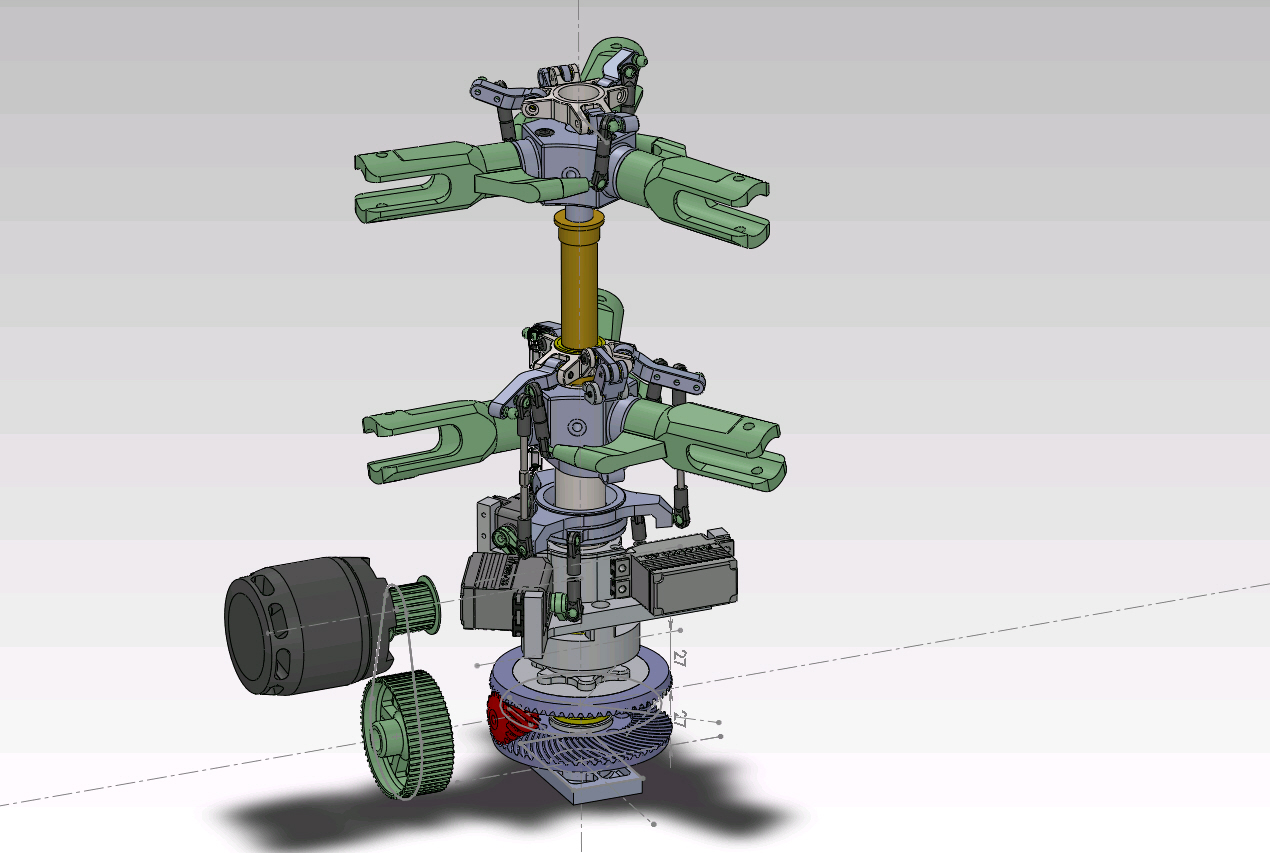
А вот мой недоделанный проект, застрявший в таком виде с июня
А по существу вопроса, соосник с коллективным шагом лучше классики во всем, кроме одной вещи - своей сложности.
Чем соосник лучше написано в википедии. Меньше размеры винтов, более компактный, не забирается мощность на хвостовой ротор, вся идет на несущие винты.
соосные самолеты 😃 www.nnre.ru/transport_i_aviacija/…/p5.php
и вертолеты: avia.cybernet.name/hel/helicopter.html
А вот мой недоделанный проект, застрявший в таком виде с июня
А как ты планируешь управлять разворотом? Как управлять 3мя сервами коллективным шагом ясно, а вот как быть с разворотом, я что-то не догоняю.
Или там должна быть четвёртая серва с приводом через вал, которая не указана на рисунке?
А как ты планируешь управлять разворотом? Как управлять 3мя сервами коллективным шагом ясно, а вот как быть с разворотом, я что-то не догоняю.
Или там должна быть четвёртая серва с приводом через вал, которая не указана на рисунке?
Дифференциальным шагом. Да, четвертая серва пока не дорисована.
а почему нет коптеров с одним винтом? 😃 у Вас ведь коптер?
Так и у коптеров такая же ситуация - есть скажем октокоптеры (8 пропеллеров), а есть соосные квадрокоптеры (тоесть визуально выглядит как обычный Х-образный квадрокоптер, но по два пропеллера на каждом луче, итого тоже 8 пропеллеров). Например вот:

Вот и хотел понять в чём преимущество соосного варианта. А чтобы разобраться, решил начать с основы (с простых вертолётов и их соосных наследников). Хотя честно говоря к разгадке не приблизился. Понял что соосный вертолёт может быть без хвоста. Но коптерам это не актуально… 😦
Но коптерам это не актуально…
А на коптеры не действуют законы физики? Есть такая штука “инерция”, первый закон Ньютона ru.wikipedia.org/wiki/Инерция все корни растут отсюда.
Почитайте в той же вики про схемы вертолетов, вон выше про самолеты давали ссылку(там таже история что и с квадрокоптерами), на эту тему написано много статей, более того защищено много докторских диссертаций и написано научных трудов, не ленитесь почитайте, а не ждите, что вам на форуме в двух словах опишут фундаментальные законы физики и вековой опыт в вертолетостроении. Если совсем влом читать спросите зачем на ту-142 стока винтов и почему его зовут “мясорубкой”
А на коптеры не действуют законы физики? Есть такая штука “инерция”…
А причём тут инерция? Ссылки которые были были даны выше, я прочитал (хотя там вначале было только про вертолёт, написано интересно и я прочёл ещё несколько статей с того сайта, а про самолёт было подкоректировано и добавлено уже после того как я прочёл то сообщение).
Но только я уже отмечал это - вертолёт и те самолёты что приводятся в примере, имеют по одному винту!
Добавление второго винта крутящегося в противоположную сторону убирает вашу инерцию и нет необходимости в хвостовом винте.
А у квадрокоптера и так 2 винта крутятся в одну сторону и 2 винта в другую сторону, и соосность ни капли не меняет его “инерцию”!
Что же касается “мясорубки” - если бы они попытались расположить по 4 двигателя с каждой стороны, то самолёт получился бы значительно тяжелей, так как пришлось бы делать значительно более крепкие крылья. Так что смысл вашего сообщения я не понимаю. Соосность вертолёта лишает его инерционного закручивания, которого и так нету у коптеров. А соосность ТУ-142 сделана для экономии массы, что так же не актуальна для соосного квадрокоптера, так как для превращения его в октокоптер придётся добавить всего две трубы по 90 грамм и увеличит массу меньше чем на 10% (ну будет весить не 2400г, а 2580г - разница не заметна с учётом что, он может таскать фотик массой в 2кг).
ни капли не меняет его “инерцию”!
Я написал, про корни растущие из этого закона, физика это сложная штука, очень много переменных
Соосность вертолёта лишает его инерционного закручивания
Лишает! Согласен! Но, не лишает вибраций, две крутящиеся штуки не на одной оси по любому вызывают вибрацию, для некоторых операторов, это важно, отсюда и наличие квадрокоптеров с соосными винтами.
А соосность ТУ-142 сделана для экономии массы, что так же не актуальна для соосного квадрокоптера, так как для превращения его в октокоптер придётся добавить всего две трубы по 90 грамм и увеличит массу меньше чем на 10% (ну будет весить не 2400г, а 2580г - разница не заметна с учётом что, он может таскать фотик массой в 2кг).
Ага, там сидело 40+ инженеров и без Вас они так и не смогли решить этот вопрос:)
Я написал, про корни растущие из этого закона, физика это сложная штука, очень много переменных
Ну эти корни я понял уже после четвёртого сообщения, и дальше везде писал с учётом этого. Вы просто повторили.
Лишает! Согласен! Но, не лишает вибраций, две крутящиеся штуки не на одной оси по любому вызывают вибрацию, для некоторых операторов, это важно, отсюда и наличие квадрокоптеров с соосными винтами.
Ну тут вы уже перегнули… Вибрация это конечно одно из самых важных для тех кто занимается съёмкой с коптеров, но только решается это отдельной каллибровкой каждого луча. Кстати самые устойчивые коптеры имеют поворот лучей в двух направлениях (примерно напоминающие закручивающуюся новогоднюю ёлку). Например DJI S1000 вообще не имеют ни одной симетричной оси вращения винтов ни вертикально ни горизонтально!
Ага, там сидело 40+ инженеров и без Вас они так и не смогли решить этот вопрос:)
Они свою задачу решили (разве кто-то усомнился в этом?), другое дело что их решение не имеет ничего общего с соосностьют квадракоптеров…
Логичнее было бы начать с вопроса, о каких “соосниках” речь - о реальных вертах или о моделях. Если вы сделаете муравья размером с собаку, у него хребет сам собой сломается, не говоря уж о возможности таскать груз весом в 20 раз больше своего… Энерговооруженность 3D-моделей на два порядка выше, чем у самых заряженных настоящих вертолетов. Отсюда и возможности к безумному пилотажу в руках умельцев. Т.е. это только по виду вертолет, а на самом деле нечто науке прежде неизвестное. Хотя в полете использует те же законы аэродинамики, что и большие машины.
Соосные rc-верты популярны в начальном классе, поскольку проще в управлении. Для этого им дали неподвижный верхний ротор с флайбаром, который верт держит за макушку, как ваньку-встаньку наоборот. Если сделать верхний ротор управляемым, соосник станет очень динамичен. Но технически реализовать это трудно (особенно на модели, из-за ее размеров). И управлять этим не проще (если не сложнее), чем вертом классической схемы. Поэтому таких вертов очень мало, стоят они дорого и никому не нужны (только в качестве “проектов”, которыми занимаются для разминки мозга и редко доводят до завершения). В мире моделей безоговорочно доминирует классика. И еще коптеры - под разные утилитарные нужды.
Насколько знаю, у соосников есть ещё такая особенность.
Часть энергии винта расходуется на закручивание потока. Абсолютно бесполезное действо.
Нижний винт врубается в уже подкрученный на встречу верхним винтом поток, суммарная скорость растёт, растёт и КПД системы.
Ну и вниз уходит более равномерный поток, менее воздействующий на парусность фюзеляжа.
и чем ближе расположены винты, тем сильнее эффект.
А причём тут инерция?
Там не только инерция, но ещё и вполне конкретное аэродинамическое торможение об воздух. Шаг лопастей то не постоянен у вертолёта.
…Если сделать верхний ротор управляемым, соосник станет очень динамичен…
да просто снять грузики с флайбара- начинает болтаться по крену и тангажу от малейшего сквозняка и неохотно прекращает движение после возврата стиков “в-нейтраль”. Субъективно- увеличиваются расходы серво.
да просто снять грузики с флайбара
Это разные вещи. Флайбар существует только на моделях, его нет на настоящих вертолетах. Там масса и инерция такие, что флайбар не нужен. А из модели без флайбара вы получите малоуправляемый снаряд, легко выводимый из равновесия малейшим внешним воздействием.
“Управляемый верхний ротор” - это ротор, который имеет крен относительно валов, как нижний. При этом исчезает эффект перехлеста роторов. Но исчезает и стабилизация в точке, которую обеспечивает горизонтальный верхний ротор. Технически реализовать это (на модели) можно, но сложно.
эффект перехлеста роторов
А можно с этого места подробнее?
Или речь идёт о пересечении (встречи) лопастей?
Ну да, о нем и идет.
Если один ротор меняет угол относительно другого, рано или поздно их лопасти неизбежно встретятся. На микросоосниках еще хуже, там встречаются нижний ротор и флайбар верхнего ротора. Что приводит к мгновенному падению модели.
Термин не имеет прямого отношения к “перехлесту” в смысле совместного вращения винтов на вертах типа чинук и т.п. Чисто модельный жаргон…-)