Activity
- Forum: topics46
- Forum: posts15354
- Blogs: entries10
- Blogs: comments133
- Clubs: topics0
- Clubs: posts0
- Market0
Назначение, функции.
Контроллер создавался под свои нужды. Хотя, думаю что он подойдет по функционалу многим строителям Bait Boat.
Работает с бюджетной аппаратурой FlySky FS-i6.
Контроллер будет крайне полезен коллегам, кто хочет объективно и точно оптимизировать винтомоторную группу на кораблике.
Для этого имеется отображение на экране пульта:
- Напряжение батареи на борту.
- Ток потребления от бортовой батареи.
- Мощность потребляемая от батареи.
- Температура датчика ( температура двигателя).
- Скорость кораблика.
К примеру, меняя винт- можно объективно видеть какое потребление идет на разных скоростях и нет ли перегрева мотора…
Тем кто желает точно выводить кораблик в заранее отмеченные точки лова, а так же для поиска этих точек имеются следующие параметры:
6.Номер точки.
7. Дистанция от кораблика до точки.
8. Ошибка меж курсом кораблика и азимутом на точку.
9. Глубина от эхолота.
То есть имея только пульт и кораблик можно находить глубокие места, перепады глубины, запоминать позиции и в последующем точно заплывать в эти позиции.
( Эхолот “на воде” не тестировался, только на столе. Более подробная информация будет после испытаний.)
Кроме того контроллер расширяет функционал FlySky FS-i6:
- Дискретный канал от тумблера на два дискретных канала- включение габаритов и фары.
- Включение питания эхолота.
- Управления двух серв на бункера от одного свободного стика пульта. Отклоняем влево- выгружается левый бункер, вправо- правый бункер.
Для повторения этого проекта будет необходимо:
- сделать плату методом ЛУТ.
- распаять элементы на плату.
- прошить контроллер либо посредством ST-LINK, либо посредством USB-TTL конвертора.
- задать параметры GPS модуля через программу u-center посредством USB-TTL конвертора.
- перешить пульт FlySky FS-i6 по известной методике посредством USB-TTL конвертора моим доработанным файлом.
Подробнее по всем этапам:
Печатная плата.
Покупной модуль с контроллером STM32 упрощает изготовление печатной платы да и прилично дешевле по сравнению с тем что покупать россыпью.
ru.aliexpress.com/item/…/32583160323.html
-
Два файла платы. Одна побольше другая поменьше. Есть разница кроме размера-
Шунт на одной из них составлен из 4-х параллельных по 0.02 ома, на другой- последовательно-параллельно 0.005 ома. Общее сопротивление шунта 0.005 ома. Типоразмер резисторов шунта 2512.
-
То что не нужно под ваши желаемые функции- можно не паять.
-
Добавлен третий дискретный канал, для фары. Будет работать или с крутилкой, или с трехпозиционным тумблером.
На схеме третий канал присутствует , на плате не разведено. На фото можно увидеть реализацию на монтажке. -
Добавлена телеметрия температуры. Есть и на схеме, есть и выводы под термосопротивление на плате…
-
GPS модуль… Можно NEO-6M, очень дешево, но менее точно.
Сам использовал в тестах BN-800, но он был относительно дорог, сейчас смотрю цены сильно снизились.
Заказал еще такой-
ru.aliexpress.com/item/…/32797180193.html
и такой-
ru.aliexpress.com/item/…/32797026966.html -
Куда на плату паять какие детали, номиналы- хорошо видно на фото собранной.
8. Диод Шотки- любой, подходящий по размеру
9. Резисторы 330, 680, 1к- в принципе все можно 680 или 1 к… Не принципиально. Но указанные номиналы- “более правильные”.
10. Модуль GPS нужно будет сконфигурировать на выдачу двух сообщений- GNGGA и GNVTG,
Проще это делать в U-center. В архиве прогу положил.
Прошивка процессора STM32.
Шить можно либо посредством ST-LINK с программой ST-LINK Utility, либо посредством USB-TTL конвертора c программой Flash Loader Demonstrator . Как это делать в инете полно информации.
В документации два файла SerPanRC_Boat_NEO-6.hex и SerPanRC_Boat_NEO-8.hex, один при использовании модулей NEO-6M, другой для NEO-8, по названию файла видно.
Модуль GPS.
Модуль необходимо сконфигурировать на выдачу двух сообщений ( мессаг) GNVTG и GNGGA ( GPVTG и GPGGA- для NEO-6M) со скоростью 38400 бод и с частотой повторения 2-5 гц.
Конфигурируется в программе U-center через подключение модуля к ПК посредством USB-TTL конвертора.
Скриншоты экрана при конфигурировании в папке документации.
Первым делом изменяете скорость с 9600 на 38400
Далее меняете частоту повторения изменяя период с 1000мс на 200-250-400-500. Подойдет любой из этих, установите к примеру 400. В этом случае мессаги будут идти 2.5 раза за 1 секунду.
Далее изменяете набор мессаг, по умолчанию их больше чем нам нужно.
Последним пунктом сохраняете все изменения одной командой- Save Config.
Более ничего менять не нужно!! Иначе имеете возможность окирпичить модуль…
Пульт.
Необходимо перешить пульт FlySky FS-i6 по известной методике посредством USB-TTL конвертора моим доработанным файлом. Файл- это таже известная крайняя прошивка 1.7.5_fast_telemetry, только мной в ней изменены наименования параметров телеметрии.
Файл прошивки и программа для прошивки в архиве по ссылке ниже.
Процедура следующая-
1.Распаковываете файл.
2. Подключаем пульт посредством FTDI к USB ( так же что и раньше делали- если уже шили)
3. Смотрим под каким com-портом FTDI ( вот тут может быть небольшая проблема- если номер выше чем 8, у меня так было, то в свойствах этого соединения нужно принудительно назначить номер менее чем 9)
4. На пульту заходим в меню и запускаешь пульт на обновление- экран станет черным
5. Запускаем экзешник ( у меня хоть и 64-битная система, но работать нормально стал только обычный экзешник)
6. Выйдет окно- предложит выбрать сом-порт, просто нажимаем нужную цифру и энтер ( у меня сом8- соответственно 8)
7. В окне будет предложены файл на выбор для загрузки-
выбираем предложенный номер.
8. После нажатия идет загрузка, по завершению пульт перезагружается.
9. Далее под свои предпочтения можно вывести в нужной последовательности параметры телеметрии на экран пульта, фото того как это у меня- в документации из архива.
Подключаем плату в кораблике по схеме соединения платы контроллера . Нагрузки на дискретные каналы- до 1 ампера, до 3S, но не индуктивные. Если индуктивные- то параллельно им нужно ставить диоды.
Настройка пульта.
Для заявленных функций используем 5, 7, 8, и 10 канал.
На эти каналы назначил следующие управляющие тумблера-крутилки-джостики ( вы можете изменить по своим предпочтениям) :
5 канал- крутилка VrA, поворотом выбирается номер точки, на экране он отображается в строке “Krs” значением после запятой.
10 канал- Swb, при его опускании на время от 0.3 до 5 сек происходит запоминание позиции в которой в это время находится кораблик, при этом вы увидите что Dist ( дистанция ) обнулится ( совпадут позиция кораблика с позицией задания) .
Позиция сохранится под номером, который выбран ранее крутилкой и в этот момент отображается на экране.
7 канал, трехпозиционный SwC, Нет огней- габарит+фара- габариты. Если приемник на кораблике не видит пульт ( нет связи) - то габариты включаются автоматом. На случай проблем в темное время.
8 канал- SwD. Включение эхолота.
4 канал, стик. Отклонение от центра влево- левый бункер, вправо- правый. Сервомашинки подключаются к плате контроллера.
Внимание: в положении “бункер опущен” положение сервы нужно выставить механически. “Расходами” в пульту и “конечными точками” можно будет откорректировать только положение “бункер поднят”.
Телеметрия на экране.
Krs - отображение азимута на выбранную точку, для наглядности выполнено так как мы смотрим на циферблат часов. Сам кораблик плывет в направлении 00 минут, цель находится в направлении куда указывает стрелка значения минут в этой строке. цифра после запятой- номер выбранной точки.
Стоит учитывать что если нет движения - то значение в этой строке- это истинный азимут цели относительно места, в котором находится кораблик. То есть куда направлен нос корабля не имеет в этом случае значения.
На небольшой скорости значение азимута будет “скакать”.
Dist - расстояние до выбранной точки в метрах, значение дробное.
Curr- потребляемый ток, в амперах, значение дробное.
Powr- потребляемая мощность, в ваттах, дробное.
ExtV- напряжение в вольтах, дробное.
Temp-температура в градусах Цельсия, дробная.
GSpe- скорость по GPS, км/ч, дробное.
Deep- глубина по эхолоту, в метрах, дробное.
При включении координаты GPS определяются не мгновенно, необходимо какое то время… Если старт “холодный”, а это бывает если последнее включение происходило давно - то время получения точных координат может быть и до 10 минут.
Если старт “горячий”, то есть последнее включение было не далее как за пару часов до этого момента - то определение координат быстрое, до минуты…
Вы можете судить о том определяются ли координаты и точно ли по GSpe ( скорости). Если не определено- то значение ноль. Если значение сильно “скачет” ( то есть кораблик на месте- а значение скорости на экране часто выскакивает более 1км/ч) - то нужно еще подождать, поймано мало спутников- и определение координат не точное.
Как только значение скорости станет в основном менее 0.5 км/ч- то можно считать что определение координат и скорости стало приемлемое…
Теперь можно пользоваться.
Удачной рыбалки.
Архив с схемой, файлами прошивки пульта и контроллера, с фотографиями и скриншотами-
yadi.sk/d/AoGhBOfHsiRYhg
Вариант прошивки для выбора номера точки посредством 9 канала ( в первой прошивке был пятый).
drive.google.com/open?id=1aJXA9RYiB7P0kaJ3Nesiu1wo…
Не для коммерческого применения.
Панкратов Сергей. serpanrc@yandex.ru
При необходимости в регуляторе с реверсом ( на авто, лодку) не обязательно приобретать специальный регулятор.
Можно приобрести и дешевый коптерный и обучить его.
На Хоббикинге периодически в продаже бывает регулятор, то по 2 то по 1 доллару.
hobbyking.com/…/dys-blheli-16a-mini-esc-with-solde…
Его и буду использовать для примера.
Этот же регулятор можно найти в магазинах в термоусадке и с напаянными проводами, но уже дороже.
Еще необходим программатор, вариантов их много но более логичным и дешевым вариантом будет приобретение Arduino nano.
Ее можно превратить в различные программаторы или множество других применений.
Один из лотов-
ru.aliexpress.com/item/…/32648343439.html?algo_exp…
Так как регулятор без проводов нужны и они.

На фото:
Слева плата регулятора, справа- ардуино нано.
Провод с разъемом для подключения батареи, кабель мини усб для подключения к ПК, провода с разъемами для подключения к приемнику. Можно взять удлинитель сервы
и разрезать его.
Далее чуть пайки. В ардуино нано впаиваем кусочек разъема-гребенки, что идет в комплекте. Нам важны два вывода- D3 и через один от него - GND. К этому разъему мы будем подключаться для программирования.
Впаиваем-

Теперь паяем провода на плату регулятора-

Слева- провода к мотору. В центре справа - провод с разъемом для подключения к приемнику или программатору. Обратите внимание- провода 2, бек-а регулятор не имеет.
Черный- земля (GND), желтый- сигнальный. Красный средний не ставим. И два провода- питание от батареи. Красный-плюс, черный- минус.
Собрал два на разные токи-

По железу все готово.
Теперь софт.
Первым делом нужно поставить драйвер для ардуино нано на ПК.
Процедура простая, как это сделать для примера можно почитать тут-
new-tech.in.ua/…/153-arduino-compatible-board-driv…
Далее идем и качаем BLHeliSuite
blhelisuite.wordpress.com
зип-архив размером около 63 мб, распаковываем его.
Все готово для программирования регулятора.
Кабелем USB mini USB подключаем ардуину.
Заходим в распакованную папку и запускаем BLHeliSuite

Теперь ардуино превратим в программатор.
Жмем на вкладку “Make interfaces”

Выбираем порт, ваша ардуина должна появиться под каким то номером USB-SERIAL CH340 , его и выбираем. Жмем на “ArduinoUSBLinker (SK Bootloader)”, на предложение жмем Yes, идет процесс загрузки, OK, Yes, OK.
Программатор готов.
Далее можно программировать регулятор.
Подключаем к ардуине провод от программатора. Не путайте концы- сигнальный к D3, земляной к GND.
Жмем “Select ATMEL/SILABS Interfase” Выбираем строку под номером 4 (Atmel SK…).
Возвращаемся в прежнюю вкладку. “Atmel ESC Setup”.
Проверяем порт- тот ли стоит. Baud ставим 57600. Подаем питание на регулятор.


Жмем “Connect”.
Должно произойти соединение ( кнопка станет- дисконнект).
Жмем “Read Setup”.
Произойдет считывание настроек регулятора, название регулятора и версия прошивки.

Вы можете поменять настройки в текущей прошивке, но лучше установить свежую. Для этого жмем " Flash BLHeli", будет предложена свежая прошивка, выбираем ее и жмем OK.
Соглашаемся, прошивка устанавливается.
Далее меняем настройки, нас прежде всего интересует “Motor Direction” , ставим “Bidirectional”.
Остальные настройки смотрите по скриншоту, на нем то как ставлю я.
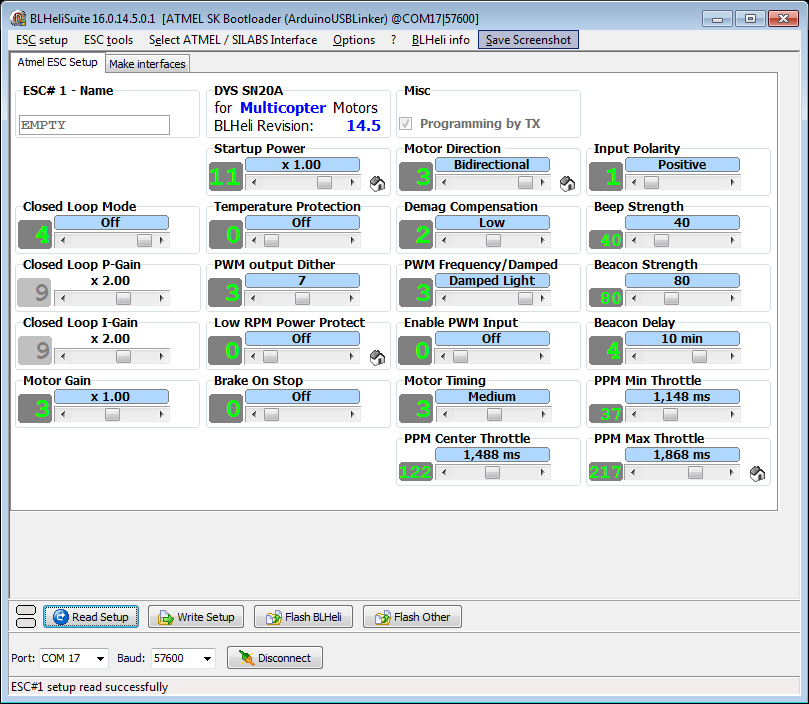
Жмем “Write Setup”, происходит копирование настроек и после этого регулятор готов к работе с реверсом.
Что еще добавить к этому:
- Подобные настройки можно производить со всеми регуляторами, у которых прошивка BLHeli.
- Программаторы существуют под это дело разные, их можно приобрести готовыми.
3.Плата Ардуино нано хороша тем что из нее можно сделать множество программаторов, в том числе и те которые с помощью этой программы могут перепрограммировать и регуляторы, в которых не стоит BLHeli.
Все это можно почитать в файлах справки, что есть в скачанном архиве.
Там же есть и перечень регуляторов с их фотографиями, которые проверены перешивкой.
О возможностях настроек на русском можно почитать в документе-
hobbyking.com/…/blheli_manual_silabs_rev14.x_rus_.…
П.С. Записи в этой категории дневника так или иначе перекликаются с созданное темой на форуме-
rcopen.com/forum/f68/topic511026
Продублирую тут, страничка уже не новая, но почему то в старом месте не видна как страница дневника…
Договорились с ребятами с Оренбурга провести тест видеолинка, Оренбург- Бузулук.
Была рассчитана антенна, изготовлена и проверена на приборах моей разработки.
По расчетам видеолинк должен перекрыть расстояние до 220 км, ограничивающий фактор- только высота полета от которой зависит расстояние прямой видимости из за кривизны земли.

Высота старта модели и высота места приема около 200 метров.
В итоге при дальности линка 170 км высота полета модели должна быть 1130 от уровня моря или 930 от точки взлета. И это без учета того что на линии приема есть холмы до 200 метров.
Для 200 км высота уже должна составлять 1765 ( 1565 над точкой старта).
Потому было выбрано относительно реальное расстояние по причине сложности набора такой высоты.
Таким образом были выбраны горки-холмы для проведения теста.
8- го мая Андрей Головин и Евгений Михайленко выдвинулись из Оренбурга, я из Бузулука.

Приехав на место обнаружил что забыл стойку для антенны, хорошо что взял с собой лопату- по пути накопать перегноя.😃
В качестве антенны - офсетная парабола 1.2 метра от Супрала. Парабола распространенная, однако длиннофокусная и есть проблемы с подбором облучателя. Из несложных подходит от Харченко, есть некоторая не оптимальность, но смирился с потерей 1,5 дб относительно
возможно-достижимого.
В качестве приемника- мой rcopen.com/forum/f8/topic235968
Использовался и усилитель с Кш не более 1 дб. Для удобства проведения теста была собрана схема на коаксиальных реле, позволяющая оперативно переключать антенну парабола-патч и режим с усилителем- без усилителя.

Неприятности на том что я забыл стойку не кончились, у Андрея поломан винт, а с другим высоты более 1200 метров достигнуть не удалось.
Антенна же настроена на частоту его видеопередатчика, у Евгения частота на 110 мгц ниже.
Кроме того почти на линии приема на расстоянии 10км от места приема оказалась вышка сотовой связи и цифрового телевидения.
Но как оказалось это не сказалось, все же динамический диапазон усилителя большой.
Сетап Евгения описан тут- rcopen.com/forum/f90/topic142729/8622
1.5 вт китайский передатчик и антенна “паук” на шикарном 4-х метровом планере.
Но эксперимент удался не смотря ни на что. Практика, как и положено, сошлась с теорией полностью.
Фотографии в альбоме «Прием Оренбург-Бузулук» SerPanRC на Яндекс.Фотках


Усилитель вносил лишь очень небольшое улучшение качества видео, в принципе так и ожидалось, но если использовать длинный кабель от антенны до приемника то установка усилителя у антенны может быть очень полезна.
На патч приема практически не было- только едва заметные признаки, усиление параболы, измеренное в предыдущих тестах, относительно патча 12 дб (в 16 раз).
По видео можно оценить как влияла высота полета на видеолинк.
Кстати, с таким диаметром приемной антенны и применении 1вт передатчика на 5.8 ггц можно получить те же 170 км видеолинка, только настройка антенны станет острее, вместо уголка в 12 градусов станет 2.5.
Большое спасибо Андрею и Евгению!!
Рассмотрим возможность приема радиосигнала, модулированного видеосигналом.
Очевидно, что видеосигнал на выходе приемника должен обладать определенными свойствами.
И прежде всего отношением полезный сигнал/шум. Хорошая статья по этой теме находится по адресу-
www.telesputnik.ru/archive/archive/15/…/60.html
В аналоговом спутниковом телевидении используют те же решения что и мы для FPV.
Модуляция, применяемая для спутникового- частотная. Важным фактором ее применения является то что она дает значительный выигрыш по выходному отношению сигнал/шум по сравнению с другими методами модуляции.
Применяемые для этого приемники в своем составе имеют частотный детектор Если рассматривать график сигнал/шум на выходе ( а чистота изображения и есть этот параметр) детектора от сигнала/шум на входе детектора то обнаружим интересное свойство. После определенного порога выходной сигнал много чище чем входной.
В указанной выше статье есть табличка, которая получена теоретически и подтверждена практически.
Рассмотрим ее
Табл. 1.
C/N (дБ) Качество сигнала
5 срыв синхронизации
6 максимально зашумленное изображение со “снегом”
7 то же, но с меньшим “снегом”
10 редкий “снег” по всему изображению при SECAM и на цветных его частях при PAL
12 “снег” только на очень ярких насыщенных цветом деталях изображения
13 качество хорошего видеомагнитофона
14 качество кабельной сети
Из таблицы следует что для того чтоб изображение по нашим меркам было цветным и чистым отношение сигнал/шум на входе детектора должен быть 9-10 дб, Срыв синхронизации- не читаемое изображение наступает при 5-6 дб. Запомним эти цифры, они нам будут нужны для дальнейшего расчета.
Замечу, на 9-10 дб превышать должно по нашему, FPV- критерию… Модули эти применяют не только FPV-ники, но, к примеру, и в видеосендерах. А там критерий, при просмотре видео на большом экране- более завышен…
Потому и можно встретить параметр чувствительности на одни и те-же модули то в -85 дбм, то в -95… Видимо в одном случае для очень чистого изображения при применении в видеосендере, а в другом- по потере синхронизации, пропаже полностью изображения в FPV.
Заметьте- между чистым (по нашим меркам, не для большого экрана) цветным изображением и полной его потерей всего около 3-4 дб, а это только в 1.4 -1.6 раза по расстоянию…
Наша дальнейшая задача- посчитать минимально возможный шум на входе приемника, после этого мы можем определить чувствительность приемника.
В большинстве приемников применен модуль RX5808. Модуль очень хороший по чувствительности.

По этому фото мы определим важные компоненты, определяющие чувствительность.
Идеальный приемник ( абсолютно не шумящий) на своем входе будет иметь мощность шумового сигнала от антенны-
Мощность шумов Рш= k*Пш*Т
где k = 1,38 • 10–23 Дж/град — постоянная Больцмана;
Пш — шумовая полоса линейной части приемника, Гц;
T- температура, комнатная - 290К
В формулу входит полоса сигнала. В нашем случае она определяется полосой пропускания фильтра промежуточной частоты приемника SAW filter NDF4010 и равна 17.8 мгц.
www.datasheetarchive.com/dl/…/NDF4010
Шум составит, после подстановки наших данных -101.4 дбм
Тут стоит отметить, что от теплового шума нельзя избавиться, он присутствует всегда и везде.
Способ борьбы с ним только один- глубокое охлаждение, к примеру азотом, как в крутых радиотелескопах. Других вариантов нет.
Однако помимо теплового шума и сами элементы приемника вносят свои шумы. Наибольший вклад вносят активные элементы на входе приемника, в наше случае это транзисторы первого и второго каскада предварительного усиления ( LNA) NPN SILICON GERMANIUM RF TRANSISTOR
NESG3031M05, они легко определяются на фото платы модуля ( четырехногие с обозначением T1K).
Нас прежде всего интересует параметр собственного шума этого транзистора, даташит на этот транзистор желающие могут погуглить.
NF = 1.1 dB TYP., Ga = 9.5 dB TYP. @ VCE = 2 V, IC = 6 mA, f = 5.8 GHz
В идеальном случае этот транзистор увеличит тепловой шум еще на 1.1 дб, об этом говорит параметр NF.
Вносит шум и последующий каскад, только в относительных единицах в меньшей степени, так как полезный сигнал уже усилен первым каскадом.
Кто имеет желание более глубоко изучить этот вопрос то можно последовать по ссылке-
www.rfdesign.ru/…/325-2013-07-17-09-27-49.html
В итоге при идеальном выполнении усилителя на паре этих транзисторов с промежуточным фильтром вклад в добавлении шума будет не менее 1.5 дб, реальный прогноз из имеющейся практики - 3 дб.
Тут стоит заострить внимание- добавление шума к тепловому это единственное с чем могут бороться производители по улучшению параметра чувствительности ( охлаждение жидким азотом или гелием опустим) . То есть теоретический предел увеличения чувствительности как раз только эти 1.5- 3 дб. Выше никак не прыгнуть. Читая рекламу производителей о чувствительности фильтруем их обещания исходя из этих знаний.
Итак, минимальный шум на входе нашего приемника в идеальном случае составляет
-101.4дбм+1.5дбм= -99.9 дбм
В реалистическом прогнозе-
-101.4дбм+3дбм= -98.4 дбм
Выше мы рассмотрели вопрос о том на сколько должен превышать сигнал относительно шума по разным критериям чистоты изображения.
В итоге получаем-
Для того чтоб изображение по нашим меркам было на грани цветным и чистым сигнал на входе детектора должен быть 9-10 дб превышать уровень шума, что составит
В идеальном случае -99.9+ 9…10дб= -90.9 …-89.9дбм
В реалистическом прогнозе -98.4 дбм + 9…10дб= -87.4 …-88.4дбм
По критерию «Срыв синхронизации- не читаемое изображение» чувствительность составит
В идеальном случае -99.9+ 5…6дб= -94.9 …-93.9дбм
В реалистическом прогнозе -98.4 дбм + 5…6дб= -93.4 …-92.4дбм
Теперь зная ожидаемые уровни чувствительности приемника можно определить максимально возможные дальности, как считая по формулам, так и пользуясь калькулятором (allcalc.ru/node/334 ) и первой частью статьи в дневнике-
rcopen.com/blogs/1628/22400
Внимательный читатель заметил что мы рассматриваем идеальные условия приема. То есть помимо всегда присутствующего теплового шума не учитываем другие источники шума, не учитываем дополнительные ослабления сигнала состоянием атмосферы, препятствиями, соседствующими элементами рядом с антенной… То есть рассматривается теоретический предел по чувствительности, дальности.
При грамотном исполнении к теоретическому пределу вполне можно подойти очень близко.
Ради интереса можно посчитать типовой сетап : 23 дбм мощность передатчика, диполя с Ку= 2.1дби , чувствительности в рамках критериев что мы посчитали выше.
Поздравляю тех кто дочитал до этого места.
Внутри любых калькуляторов для расчета радиотрасс лежат в основе простые для понимания формулы.
Разложим по полочкам…
Представим источник сигнала, равномерно излучающий радиосигнал во все стороны. Такой источник называют изотропным.

Если представить сферу, в центре которой находится источник, то вся мощность этого источника равномерно распределена по всей поверхности этой сферы с радиусом R, площадь которой равна

В таком случае на единицу площади приходится часть мощности, и она меньше мощности источника в 4πR2 раз.

Если мы знаем площадь, с какой собирает энергию антенна, то уже по этой простейшей формуле мы можем определить мощность на ее выходе. Такие антенны, характеризующиеся площадью, называют апертурными. Зеркальные, линзовые, рупорные…
Для изотропной приемной антенны формула выглядит так
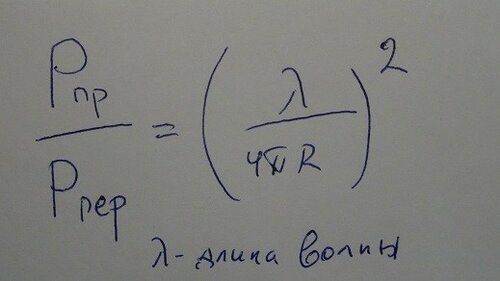
Распишем ее на члены, так она станет более простой для понимания.

Левый член определяет мощность, приходящуюся на единицу площади, а второй член это ничто иное как эффективное поперечное сечение антенны, с которой она собирает поток мощности.
Любая антенна, хоть она и не имеет явную площадь как апертурная, имеет все равно эквивалентную площадь.
Хорошо нам известный диполь имеет усиление по отношению к изотропному излучателю 2.14 дби, что в 1.64 раза больше.
Оценим с какой площади он собирает поток мощности, каково его эффективное поперечное сечение.

Видим что диполь собирает энергию с площади равной площади прямоугольника с одной стороной равной длине диполя ( половина длины волны) , а другой стороной в 1.91 раза меньше чем его длина.

Вполне ожидаемый результат!
Если антенна имеет усиление относительно идеальной изотропной антенны то и мощность сигнала на выходе у нее будет пропорциональна этому усилению. Ровно то же и с антенной на передаче.
С учетом усилений передающей и приемной антенны формула будет выглядеть так:

Формула известна как «Формула передачи Фрииса».
При вычислениях много проще складывать и отнимать,оперируя децибелами, чем умножать и делить.
Приведем формулу к логарифмическому виду и произведем расчет с данными из следующего эксперимента.

Пользователи часто пользуются не формулами, а калькуляторами, один из них находится по адресу-
allcalc.ru/node/334
Подставим в него те же исходные данные. Мощность передатчика 28 дбм, расстояние 1 метр, антенны диполя с Ку= 2.1дби, потери на кабелях и разъемах 0.5 дб.

Совпадение результатов калькулятора результатам расчета по формуле полное.
Поставим эксперимент на проверку теории.
Измеряем мощность передатчика, результат 28 дбм.

Разносим антенны передатчика и измерителя мощности на 1 метр и измеряем мощность на приемной антенне. Антенны имеют на этой частоте КСВ около 1.5 ( не нашлось антенн на одну частоту, потому они на частоте где у них не минимумы КСВ).
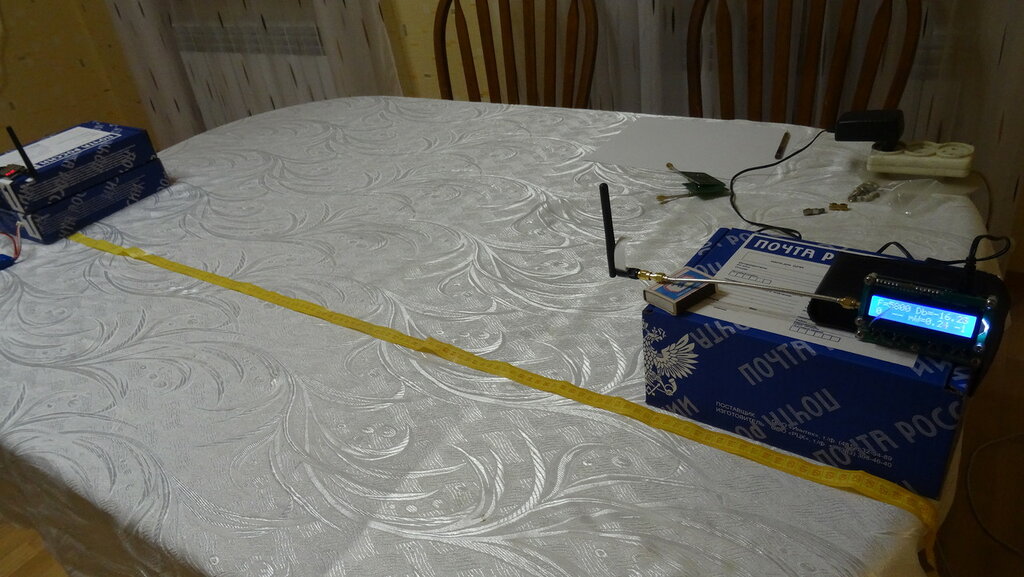
В процессе измерения показания несколько меняются за счет влияния тела оператора, но показание при наблюдении с большого расстояния соответствует расчетному в -16.5 дбм.
Заодно был подключен патч для оценки его усиления
 Уровень с него составил около -11 дбм, а значит его усиление более чем у диполя на 16.5-11= 5.5дбд или 7.6дби. Что даст вдвое большую дальность по сравнению с диполем.
Уровень с него составил около -11 дбм, а значит его усиление более чем у диполя на 16.5-11= 5.5дбд или 7.6дби. Что даст вдвое большую дальность по сравнению с диполем.
Выводы:
- Формула во всех калькуляторах одна- «Формула передачи Фрииса»
- Формула абсолютно понятная, легко объясняется на “пальцах”. Практически только геометрические расчеты. Никакого колдовства и шаманства.
- Экспериментальные данные полностью подтверждены теоретическим расчетом.
- Один из результатов анализа формулы-понятие того по какой причине дальность выше на меньших частотах при одном виде антенн ( для примера- диполей). И так же понятно что с одним и тем же диаметром зеркальной антенны дальность будет одинакова на разных частотах…
- И дальность работы лампочкотестера, хоть он и в ближней зоне, соответствует расчетам, желающие легко могут проверить.
Во второй части рассмотрим такой параметр как чувствительность приемника. Расчет теоретически возможной чувствительности приемника.
rcopen.com/blogs/1628/22403 .
На прошлых страничках своего дневника
rcopen.com/blogs/1628/22316
rcopen.com/blogs/1628/22323
я упоминал о своей очередной разработке-измерителе мощности.
Это страница- ответ на просьбы поделиться этой разработкой.
Вариантов за последние лет 5 у меня было множество, но только в этом году решил более тщательно проработать конструкцию.
Задача стояла сделать прибор с достаточной точностью для нашего хобби и удобным в применении.
Есть несколько приборов на рынке с подобным функционалом, однако они имеют существенные недостатки как то:
- Совершенно не согласованный измерительный вход прибора, с высоким КСВ на верхних диапазонах ( вплоть до КСВ>2).
Это дает при измерениях не контролируемые значительные ошибки. - Калибровка по малому числу точек. Но детектор измерителя имеет очень большую неравномерность как от частоты, так и от амплитуды, в результате получается не приемлемая точность. Наиболее часто используемый детектор ( другие имеют не лучшие характеристики)-
www.analog.com/media/en/…/AD8317.pdf - Неудобное для пользования меню.
- Размер самого прибора и размер индикатора неудобен в эксплуатации.
5 Внешний подключаемый аттенюатор не калиброван.
В результате появился сначала рабочий макет-


а затем и окончательная версия-



Собранная плата без экрана над детектором

Итог-
Прибор не мал и не велик для руки, показания легко считываются.
При работе нет никаких многостраничных меню. Все всегда на экране индикатора.
Работа с прибором:
- Двумя левыми кнопками выбирается частота, на какой идет измерение.
- Если сигнал импульсный ( передатчик пульта или LRS) кнопкой “Impuls” включаем-отключаем режим измерения импульсного сигнала , при этом на экране отображается знак “%”, а перед ним значение скважности сигнала , в процентах.
- При подключении-отключении внешнего аттенюатора кнопкой “Attenuator” включаем-отключаем поправку на затухание, вносимое подключенным внешнем аттенюатором.
При этом при включении режима отображается знак “А”. Поправка на каждой частоте предварительно измерена- откалибрована.
В зависимости от установленного аттенюатора внутри прибора наибольшая точность без внешнего аттенюатора в диапазоне +5 дбм… -35 дбм, с аттенюатором +33 дбм ( 2 вт)- -5 дбм или, при другом исполнении- без внешнего аттенюатора 0 дбм… -45 дбм, с внешним аттенюатором +33 дбм ( 2 вт)- -15 дбм.
Калибровка произведена на частотах 145,435,868,915,1100,1280,1360,1800,2440,2700,3300,4400,5400,5600,5800,5900, на каждой по 10 уровням-
0,-2,-5,-10,-15,-20,-25,-30,-35,-40.
Схема-

Плата-

Страница с проектом на гитхабе, пока там файл печатной платы, и пара хексов, под кварц 16 мгц или под внутренний генератор 8 мгц.
github.com/SerPanRC/Radio-Control-Power-Meter
Продолжение следует…
Для достижения наилучших результатов по дальности видеолинков и RC управления требуется контроль мощностей передатчиков, настройка и проверка-сравнение антенн
по Ку ( коэффициенту усиления), о чем шла речь в прошлой теме- rcopen.com/blogs/1628/22321
Кроме того наиважнейшим параметром антенны является КСВ ( SWR по английски), от него зависит и эффективность работы антенны и работоспособность передатчика.
В случае высокого КСВ передатчик может выйти из строя.
Вкратце о сути этого параметра:
Если нагрузка передатчика, подключенная через линию передачи, не равна 50 омам и (или) имеет кроме активной составляющей и реактивность ( не скомпенсированную емкость или индуктивность) то часть мощности не поглощается нагрузкой и отражается.
Контроль КСВ осуществляется в результате измерения падающей мощности и отраженной. Для того чтоб выделить отдельно эти составляющие служат либо мосты, либо направленные ответвители.
То есть для измерения КСВ нам нужно:
- Генератор ВЧ ( передатчик)
- Мост или направленный ответвитель для выделения прямой и обратной волны
- Измеритель мощности.
В качестве генератора можно использовать передатчик, но с некоторыми оговорками, о чем будет сказано ниже.
Мосты и направленные ответвители бывают разные, для примера некоторые приобретенные на Ебее-

Для опытов далее я буду использовать мост своей разработки, который имеет лучшие характеристики чем представленные на фото.
Измеритель мощности опять же свой.
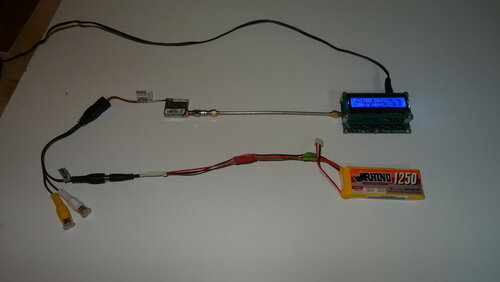
Соберем установку для определения КСВ антенны-

Передатчик- аттенюатор-мост- измеритель мощности. К свободному порту моста- антенна.
Внимательные заметили что кроме перечисленного выше появился аттенюатор. Его необходимость вызвана тем что передатчик выдает излишнюю мощность на мост. Приходится ставить аттенюатор- ослабитель мощности. Кроме этого он делает измерения точнее, но причина этого явления не является темой статьи…
Процесс измерения прост, процедура такая: - антенна не подключается, вывод моста для антенны остается свободным. В результате вся мощность отражается и поступает на измеритель. В результате мы
косвенно измеряем прямую волну. Если нужно измерить не на одной частоте- то переключаем каналы и вносим результат в таблицу.
2 Далее подключаем антенну и измеряем отраженную волну. На одной частоте или разных каналов и вносим значения в таблицу. - Вычисляем разницу меж прямой и отраженной ( вообще то их отношение, но разница меж логарифмическими единицами и есть отношение истинных значений) Вносим в таблицу.
А затем либо вычисляем по формуле, либо смотрим по табличке по фото-

Таким образом я получил : прямая -12.84 , отраженная -25.14 , разница 12.3 дб, по таблице определяем КСВ=1.64 . Плохо, на других приборах на этой частоте КСВ был лучше.
А причина в том что часто передатчики имеют высокий уровень гармоник, в том числе и тот что я применил. То есть помимо того что у него на выходе есть сигнал основной, есть и гармоники, то есть частоты вдвое, втрое и более высокие. У этого передатчика вторая гармоника меньше основной всего лишь на 12 дб.
И вот представьте что у вас идеальная антенна. На основной частоте она ничего не отражает и КСВ должен быть равен 1, но на второй гармонике у нее очень плохое согласование ( 2280 мгц- в нашем случае) и эта гармоника почти полностью отразится и зарегистрируется прибором. Что ухудшит показания КСВ ( но не сам КСВ!!!) при нашем измерении.
Потому нам в измерительной цепи нужен еще один элемент, фильтр, он пропустит основную частоту и не пропустит гармоники.
Комплект и измерительная цепь будут выглядеть так ( передатчик, мост, фильтр, аттенюатор) -


Интереса ради измерю КСВ фабричной нагрузки и самодельных с целью понять- можно ли их применять для измерений на частотах 1.2 ггц.

Измеряем фабричную и далее самодельные-


Результат всех опытов сведен в таблицу-

Что интересного можно извлечь из нее?
- После того как в измерительную цепь внес фильтр измерение КСВ антенны на частоте 1140 мгц с 1.64 стало 1.37, что соответствует действительности.
- Видим что минимум КСВ антенны около 1160 мгц, 1.09 Замечательное согласование.
- Нагрузка, составленная из 3-х 1206 сопротивлений в параллель по 150 ом ( 50 ом в итоге) имеет КСВ практически как и у фабричной ( 1.088 проти 1.08 у фабричной) , что очень неплохо.
- Эквиваленты несогласованных нагрузок из резисторов 0805, одна из двух 75-ти омных сопротивлений ( 37.5 ом) , вторая из двух 150-ти омных ( 75 ом) при измерениях показали КСВ 1.38 и 1.52,
а в идеале должны были показать 50/37.5=1.3333 и 75/50=1.5, что очень близко, 1.38 и 1.333, 1.5 и 1.52 . То есть измерения довольно точны, очень хороший результат…
Это уже далеко не показометр, а измеритель.
Ранее я писал о простейшем, но крайне полезном приборе- лампочкотестере. Он позволяет выявить явные проблемы радиоканалов управления и видеолинков.
Но если пытаться выжать из своего оборудования максимум и для знания того- есть ли соответствие параметров приобретаемого оборудования заявленным производителем- то крайне необходим измеритель мощности СВЧ.
На предыдущей страничке- rcopen.com/blogs/1628/22316 я остановился на недостатках детектора СВЧ мощности на диодах Шотки.
Кроме упомянутого существуют и другие способы измерения мощности СВЧ,в частности существуют детекторы, основанные на изменении температуры датчика под воздействием СВЧ энергии. Подобные детекторы обладают рядом преимуществ, однако по причине очень высокой стоимости они не доступны для хоббийного применения, стоимость только датчика от нескольких десятков тысяч рублей.
Потому все недорогие измерители мощности, предлагаемые на рынке, в основе своей, имеют микросхему логарифмического детектора, чем достигается не большая стоимость и приемлемая для большинства точность.
Не является исключением и измеритель моей разработки.

На фото измерение мощности передатчика 5.8 Ггц, там же виден промышленный детектор японской фирмы Anritsu на термоэффекте, с которым проводилось сравнение показаний.
Коллегам должен быть знаком ImmersionRC RF Power Meter www.immersionrc.com/fpv-products/rfpowermeter/
Он имеет ряд недостатков, сильно снижающую точность измерений. Калибровка по малому количеству точек , около десятка, плохое согласование входа с высоким КСВ, что так же значительно понижает точность.
Данные недостатки устранены в моей конструкции.
С какой целью используют Power Meter?
Первое и явное применение - это измерение мощности передатчиков. Что интересно, в разных темах часто можно было прочитать о том что мощности купленных передатчиков очень сильно не соответствую заявленным производителям.
Ради интереса я промерил все что было под рукой и сверил с показаниями фабричного прибора, немного фото:


1.Передатчик TS832S ( 600 мвт 5.8 ггц) показал мощности 420-505 мвт на разных каналах,
2. LM-500 мвт показал 440-570 мвт,
3. пульт Futaba T8FG - 46 мвт,
4. LRS 1 Вт- 912 мвт при максимальной мощности и 145 мвт при минимальной.
Особых оснований для обвинений производителей не обнаружил.
Второе применение, которого я коснулся на прежних страницах дневника, это измерение напряженности электромагнитного поля, получим подключив прибор к антенне. Однако нужно понимать что в этом случае прибор собирает весь “мусор” эфира.
Но, в некоторых случаях, он может быть очень полезен. К примеру, для сравнения или настройки антенн с большой направленностью.
Яги, биквады, патчи и прочие… Почему именно они? Потому как: а) простые антенны широконаправленные, принимают отраженный сигнал со всех сторон, что очень мешает измерениям. б) в них и настраивать нечего, что определяет их направленность.
Но если направленная антенна подключена к прибору, а передатчик с передающей антенной установлен на значительном удалении, то измерения как для настройки так и для сравнения вполне можно проводить.

Я таким образом настраивал положение облучателя на антенне для приема FPV на расстоянии 170 км.

От его положения ( совмещение фокуса отражателя с фазовым фокусом облучателя) значительно зависит усиление антенны.
rcopen.com/blogs/1628
Третье применение- это использование измерителя мощности в процессе измерения КСВ (SWR).
Про это следующая страница дневника.
На прошлой странице rcopen.com/blogs/1628/22309#comment21 была затронута тема простейшего индикатора поля- лампочкотестера.
Ничего более простого и эффективного для оценки работоспособности передатчиков и антенн нет.
В случае же если необходимо получить максимальную отдачу от используемых радиопередающих устройств- то необходимы количественные измерения. И тут без измерителя мощности не обойтись.
Простые и доступные измерители мощности работают по принципу детектирования высокочастотного сигнала.
И первые опыты, когда я понял что без измерителя мощности я далее не продвинусь, были с детекторами на диодах Шотки. Порывшись в коробках обнаружил несколько плат из прошлого, их и буду использовать в демонстрационных целях…

Это пара детекторов на диодах HSMS-286x, выполненных в соответствии с рекомендациями производителя, один выполнен на диапазон 2440 мгц, другой на диапазон 5800 мгц.
www.avagotech.com/docs/AV02-1388EN
Поигравшись несколько лет назад с ними я понял- что это не мой путь. Для того чтобы сделать из него измеритель, а не показометр- схема резко разрастается и усложняется.
Для повышения чувствительности нужно вводить цепь смещения, для уменьшения температурной нестабильности- применять дифференциальное включение пары диодов и обязательное применение диф усилителя. И на этом фоне применение чипов уже доступных в то время логарифмических детекторов было явно более предпочтительным.
Но все же опыты провел, используя детектор в составе индикатора поля.

Расстояния по сравнению с лампочкотестером можно использовать много большие, и при тех что на фото- напряжение с детектора на приборе в сотни милливольт, что позволяет еще более увеличить расстояние меж антенной передатчика и детектора. Однако это не на пользу.
Следующее видео даст пояснение-
Камера достаточно удалена - однако ее небольшое перемещение приводит к значительным изменениям показаний. Кто читал прежнюю страницу помнит что я писал про это…
Еще видео и фото , где в качестве детектора индикатора поля мой Power Meter.


Расстояния можно делать более метра, но влияние всех предметов вокруг еще более значительное. Для количественных измерений поля использовать можно и нужно, но сложно, нужна безъэховая камера или антенны с большой направленностью ( к отражениям со стороны не чувствительные).
По видео видно- что в процессе измерения сигнал меняется более чем на 3 дб, а это вдвое…
Что имеем в остатке: детектор на диоде у меня так и не нашел применения. Для оценки напряженности поля более удобен лампочкотестер, а для прочих измерений он явно проигрывает детекторам на микросхемах логарифмических детекторов.
Следующая тема будет о измерителе мощности на логарифмическом детекторе и его использовании в нашей практике.
Практически все коллеги по хобби сталкиваются с ситуацией что видеолинк или канал управления либо не работает вовсе, либо работает на дальности много меньшей ожидаемой. Без средств контроля поиск неисправности становится большой проблемой и часто бывает возможен только поочередной заменой всех комплектующих. И благо- если есть у кого взять что то на пробу…
Но 90% причин этой проблемы может решить лампочкотестер. Он занимает достойное место даже у владельцев дорогих измерительных приборов, потому как недорого обходится, занимает мало места и даже в поле поможет вам легко определить большинство проблем с радиоканалом.
Кроме того он имеет преимущества перед другими, более чувствительными показометрами.
В результате того что помещения, да и пространство на улице- совершенно не похоже на безэховую камеру- при измерениях антенн будет и множество отражений. В итоге, прибор с большей чувствительностью, будет на большем расстоянии от антенны и на меньшем от отражающих предметов. Почему и будет принимать “кашу” со всех сторон.
В моей практике пара лампочкотестеров уже очень давно. И лампочек в давние времена по случаю было куплено достаточно.
Выпало чуть времени и поставил серию экспериментов.
Нужно сказать что отдельных постов на форуме, посвященных лампочкотестеру, было не мало, но подробного описания не встречал.
На память, самый подробно на этом вопросе останавливался Александр Анашкин, помню его статью- но на форуме не нашел.
Но, в любом случае, рекомендуемые размеры, сделанных мной ранее лампочкотестеров- не сошлись ни с какими тут рекомендованными.
При очередном заказе печатных плат на свои поделки пририсовал на свободное место заготовки для “лампадок”.

Для вибраторов использовал стальную омедненую проволоку диаметром 1 мм. Подбором длин вибраторов определил их длину для максимальной чувствительности на всех интересующих частотах. Лампочки использую двух видов, 1.5в 15 ма и 1.5в 12 ма. Первые лучше использовать для более низкочастотных диапазонов, вторые- для 2.4 и 5.8Ггц.
Шаг металлизированных отверстий на заготовках из стеклотекстолита 2.54 мм.
В качестве держателей- палочки для шашлыка, в ней пропил. Соединение с помощью термоусадки.
Таким образом выглядят детали лампочкотестера перед сборкой-
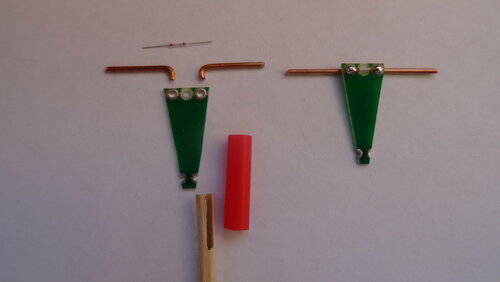

Собранные- 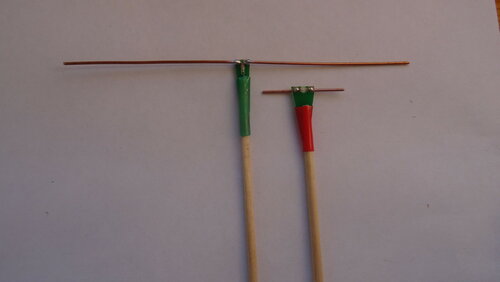
Диапазоны 2.4, 5.8Ггц и 433 мгц- узкополосны и девайс перекрывает весь диапазон. А диапазон 1.2 ггц достаточно широкополосен и для его перекрытия лучше использовать три разных.
Длины вибраторов в ходе экспериментов получены следующие:
435 мгц - 160 мм
1100 мгц - 63 мм
1160 мгц - 58.8 мм
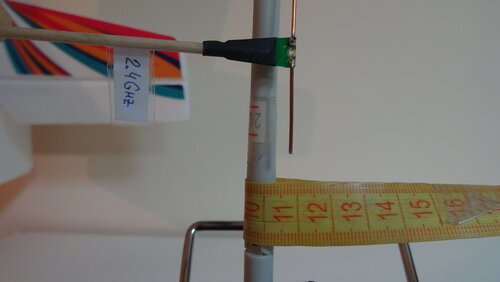
1250 мгц - 53.8 мм
2440 мгц - 25.5 мм
5800 мгц - 12.3 мм
В итоге опытов получил такой комплект-

Для оценки дальностей свечения своим Power Meter измерил мощности своих подопытных-


Причем измерил мощность без аттенюатора меж передатчиком и измерителем, и с 6 дб аттенюатором, для чего- далее.
Далее тесты дальности на разных частотах с заранее известными мощностями, некоторые интересные моменты-
Дальность от Футабы ( 46 мвт в импульсе, 13.5 средняя) и Спектрум ( мощность не измерял- лень лезть внутрь пульта)-
НО это иллюстрирует давний спор- у кого передатчик мощнее:)


У Спектрума в разы более мощный, но вот протокол все портит.
Специально делал два замера для иллюстрации изменения дальности от мощности, изменение мощности в четверо (6дб) - смотрим изменение расстояния-
LM-500mw


Вчетверо разная мощность ( на 6дб) - вдвое расстояние. Как и должно по теории.
Футаба с бустером, без бустера было фото выше
LRS 1вт, встроенного в Спектрум, на максимальной мощности и на средней-



Что радует- выполненные по этой технологии лампочкотестеры с лампочками из одной партии показывают совершенно схожие результаты.
Для тестов я использовал антенны на каналах, где эти антенны при измерениях показали свой минимальный КСВ. Мощности передатчиков на этих каналах были измерены.
То есть зная замеры дальности свечения и мощности передатчиков легко можно сравнивать и оценивать не только исправность- но и мощность своих испытуемых,
так как зависимости дальности свечения от мощности тоже известна.
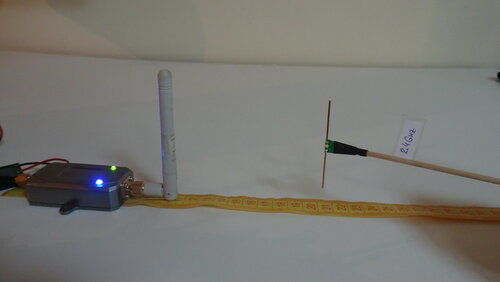
Расстояния, на которых загорается лампа-
5800 мгц, 450 мвт- 50 мм
2440 Футаба 46 мвт в импульсе ( 13.5 средняя) - 10 мм
2440 Футаба с бустером - 100 мм
2440 Спектрум 30 мм
1160 LM 500 мвт ( по факту 550 мвт) 250 мм
LRC 1вт, при полной мощности ( 912 мвт)- 1000 мм