Activity
“Два” по теории: у мультивибратора- откуда синусоида возьмется?
чорт, я думал там что-то вроде колебательного контура… Но вы правы, я абсолютный нуб, совсем недавно взявший паяльник в руки.
Можно. Уже все придумано и сделано:
ru.aliexpress.com/item/…/32410454603.html
шикарно, спасибо!
Спасибо, вариант на 555 действительно очень хороший и дешевый, схема полностью аналоговая получается. В даташитах разобрался, все довольно просто рассчитывается. Уже закупился 😃
Подскажите еще в плане доп.апргрейда: можно ли к этой схеме еще как-нибудь цифровой индикатор с частотой в герцах прикрутить?
Спасибо,
но мне кажется не подойдет, не регулируется длительность вспышки светодиода, и сигнал если я правильно понимаю синусоидный. На 555 и импульс прямоугольный и все параметры под контролем.
Всем привет!
Для моих целей понадобился стробоскоп с плавной регулировкой частоты.
Нужен совет опытных гуру, с какой стороны подойти к задаче.
Понятно, что можно сделать на ардуино, но на ней вообще все что угодно можно, и это как микроскопом гвозди заколачивать.
Можно ли как-то эффективней и проще сделать, желательно на элементной базе доступной в чипидипе?
Подкиньте принципы пожалуйста, я дальше сам постараюсь нагуглить.
ЗЫ. желаемый диапазон частот работы: 10-150Hz
Привет, подкиньте пожалуйста варианты (и марки) моторов на 1755 проп, питание 4S, тяга 50% на мотор 1кг+масса мотора. Только не Tiger 😃
Я пока смотрел что есть на HK, emacs и DYS.
PS. Немного не по теме, но может кто-нибудь слышал об опыте использования стробоскопа для анализа вибраций?
Да, только это был командный завал. На Вашем графике видно, что рол четко выполнил команду. А вот Х и DX, VelX и DVelX начали разбегаться. Хотя это как раз может была регистрация факта и нежелание пикса исправлять ситуацию. Тогда это конкретный глюк.
Спасибо.
К таким же выводам пришел, получается что исходя из корректных данных пикс начал выдавать некорректные команды управления. Печально. Попробую на буржуйском сайте что-ниб выяснить.
У Вас коптер в лойтере. При наборе высоты произошло смещение по координате.
В реальности не было смещения, или по крайней мере не в ту сторону. А заваливаться он начал конкретно - видно как постепенно, медленно и неотвратимо растет крен. Я за ним такой глюк знаю, поэтому успел срочно до катастрофы переключиться в альтхолд, а раньше я просто движки вырубал.
У вас маг уезжает в моменты газа и шим в питании. Я бы подальше удвинул силовые провода и в разъём пикса на 5В повесил маленький кондёр на несколько тысяч мкф.
Вы думаете что просто глючит (со?)процессор? Или все-таки он на какие-то входные данные от датчиков так реагирует?
В момент начала завала уровень вибраций (vibe.VibeY, был в районе 5, вот вообще считай - нет вибраций)
Нужна помощь, не могу разобраться.
В прилагаемом логе ситуация: на третьей минуте в режиме Loiter коптер начинает заваливаться влево (на график выведены отмасштабированные: сигнал от пульта (RCIN1), ATT.DesRoll, ATT.Roll):
FAIL на ixbt.photo:
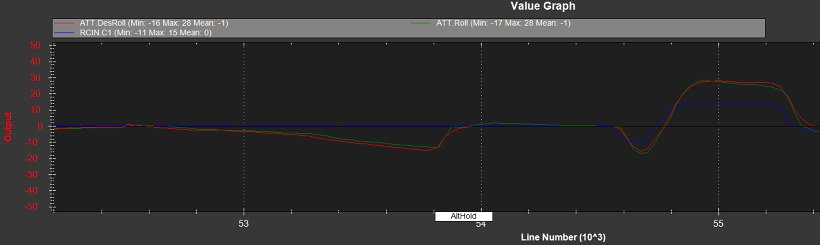
Почему-то контроллер начинает выдавать команду на моторы двигаться влево, причем крен продолжает расти. Я быстро переключаюсь в режим AltHold, коптер выравнивается.
Почему это происходит?
Судя по EKF у меня большие проблемы с магнетометром, но RAW данные что с первого, что со второго вроде консистентны.
Вибрации тоже в норме.
(коптер на раме 850мм, 4s, пропы 1755, 2кг полетная масса, pixhawk 3.3.2)
Марко выложил баг с видео. Проваливается высота в althold и pos hold в 3.3
Блин, этож моя проблема, несколько страниц назад я всех тут задолбал этим багом.
баро добросовестно видит падение давления от скорости
Только в моем случае баро добросовестно видел повышение давления. Может, это и не мой случай в видео, у меня было в лойтере. Но выглядит прям как у Марко в начале видео.
весит 583 g
Блин, молодцы инженеры. У меня только один подвес сам столько весит, без камеры.
Похоже BM сами сделали своей микре конкурента - разработали вместе с джедаями Zenmuse X5R
Я когда джедаевский X5R увидел сразу понял что это БМ.
Я думаю они поэтому микру и задержали с выпуском, чтобы для джедаев первых выпустить. С джедаями у них навар выше получается, значительно. И продажи, я думаю, будут выше. И они не конкуренты, если так то - у джедаев это готовое решение: поставил и полетел, а с микрой надо мозгами шевелить и руками работать.
Вот только есть сомнения в оптимальности полетных характеристик инспайра с таким подвесом. Доп.вес минимум 1 кг получиться должен был, инспайр конечно его потянет, но полетное время сократится радикально.
Пока правда не очень понимаю разницу…
Sport немного меньше по размаху (реальный размер 600), но у него центральная часть больше, что позволяет удобнее размещать электронику. Плюс изначально установлены ретраки.
У IRON MAN 650 ноги складываются/раскладываются вручную, хотя при желании отдельно можно приобрести сервы для ретраков. Меньше центральная площадка, мне 3й этаж пришлось сооружать дополнительно чтобы все разместить.
PS. Решил послать в ж@пу эти EMAX, от них сильные вибрации, и не получается сбалансировать. Тем более у них довольно длинный ротор, что дополнительно мешает балансировке. Пока полетаю на 3608, с перспективой смены на 4108.
Открыл еще раз свой лог. Почему то лог барометра постоянно 0.
Наверное, данные с него в первый полет просто не логировались, также как и данные imu. Во втором полете (“8664”-я минута полета) данные присутствуют. Вибрации кстати в пределах 1, в пиках до 1.5
Да разные, ну например основной аппарат на котором летаю больше всего: 600 рама квадр, моторы 4108 690kv, 4s,пропы 12-13, вес от 2,3кг до 3кг, в зависимости от подвеса\камеры…
Спасибо. Можете какой-нибудь лог скинуть, просто посмотреть как нормальный полет должен выглядеть?
моторы санни и тмотор использую
Какие размеры комбинаций моторов и пропов + полетная масса?
Я стараюсь выводить на 0,3-0,5
У вас какая конфигурация?
Вибрации у вас велики
Да, вы правы. На втором IMU вибрации за пределы выходят. Возможно, поэтому в EKF2.Ratio скидывается в этот момент в 0, признавая первый датчик неработоспособным. Возможно, и обороты поэтому снижает, считая что коптер пошел вразнос из-за вибраций.
Кстати, опубликуйте моторы+пропы на которых эта проблема возникает.
Моторы EMAX 3515, пропы тарот 1555. Один из пропов с ущербом, но сносно сбалансирован. В выходные поставлю свежие пропы - треугольные quanum 1755.
Тиха украинская ночь но
салобаро лучше прикрыть на всякий случай как от ветра так и от солнца 😃
Ну и прошиться на последнюю прошивку. Или откатиться на 3.2.1 - последнюю стабильную.
А то пока мы тут с вами мозжечок ломаем разрабы уже все пофиксили
Мне нельзя на 3.2, я использую функции и оборудование которых нет в 3.2
Прикрыть не вопрос, но пока не заметно в логах ничего дискредитирующего текущую конфигурацию баро.
Кстати, пикс находится под пластиной, так что можно сказать баро прикрыт, от прямых потоков точно.
Придется к разработчикам видимо обратиться…
Работоспособность imu может от температуры зависеть?
Поролон в коробочку пикса. Пикс в руках не держал, но наверняка там есть место. Если нет , тогда нужен колпак.
Заморачиваться с графиками, я думаю, не стоит. Самого факта изменения баро высоты от скорости уже достаточно, чтобы сделать вывод, что датчику плохо.
А у вас не возникало мысли, что баро реальную высоту показывает? Коптер снижается - баро показывает снижение высоты. По-моему логично, нет?
Кроме того, если бы бародатчик врал (а на графике видно что баро регистрирует снижение высоты) коптер наоборот улетал бы вверх.
Блин у вас 3.3r11. Вышла уже релизная версия. Кто знает что там поменяли кроме того что есть в changeloge.
github.com/diydrones/…/ReleaseNotes.txt
По теме смотря лог заметил что на момент просадки возрастали вибрации на втором акселерометре. Как читать EKF логи не знаю. Может фильтр калмана дурит?
Это очередной релиз кандидат, не релиз. Видимо только фикс багов идёт, новые функции уже не добавляют.
Да, там в этот момент на фильтре что-то непонятное для меня происходит, контроллер полностью отказывается от данных одного imu в пользу другого. С другой стороны вибрации вроде в пределах нормы и clipping остаётся нулевым.
Логику Вы описали правильно. Почему в логе не так прокоментировать не могу , у меня не читается. Алексей Вам писал , что надо смотреть другие графики.
Во все тонкости работы баро датчика не влазил. Мне как инженеру достаточно знать ограничения: на датчик не должен попадать свет, он должен дышать, но при этом на него не должны попадать потоки от винтов и набегающего воздуха. Типовая рекомендация разработчика - закрыть черным поролоном. Более грамотное решение - накрыть обтекаемым колпаком (что и предлагал Вам сделать Алексей).
Лично у меня датчик закрыт обтекаемым корпусом коптера (без поролона), поэтому у меня нет таких проблем на любых режимах и скоростях.
Повышение вибрации с увеличением скорости - это нормально. Она возникает из-за набегающего потока, но это следствие, а не причина. Хотя только добавляет проблем.С этим тоже согласен.
У меня пикс, куда там поролон?
У меня другая ситуация - давление растёт, а высота падает. Я вроде все нужные датчики на график вывел, если чего-то не хватает скажите.
Мне кажется, в него безусловно задувает, раз пила графика такая сильная.
Пила в 20см, мне кажется для баро это довольно неплохая точность (если нет, покажите примеры где шум ниже). По крайней мере в покое с выключенными моторами уровень шума примерно такой же.
Даже ок, если задувает, как это может приводить к тому, что коптер в полете проседает?
Ну и еще раз. В горизонтальном полете появляется наддув от набегающего потока.
И? Что происходит потом?
Ну, а внутри у него датчики, в частности баро, который и реагирует на наддув.
Я правда не понимаю. Вы ведь такой сценарий описываете:
- Коптер начинает двигаться, ветерок начинает обдувать контроллер.
- Давление на баро уменьшается (?) и контроллер интерпретирует это как не запланированный набор высоты
- Для компенсации набора высоты контроллер понижает обороты движков, в результате чего коптер снижается.
Я правильно излагаю? Но по логам не сходится же!
Или я что-то простое не понимаю, за что прошу заранее прощения но всё-таки объясните подробнее пожалуйста.
на вид несмотря на то что на скорости падает высота - высота по баро выше, но как только ускорение прекращается
Я не очень понял. В CTUN.BarAlt - тот же BARO.Alt, но относительно старта. Вычтите из BARO.Alt 4 и получите CTUN.BarAlt 1 в 1.
(я смотрю на момент 8:24:48 - 8:25:11, т.е. 20 секунд до 6й минуты полета)
Я не увидел, чтобы данные по высоте любого из датчиков высоты ползли вверх. GPS.RAlt почти совпадает с CTUN.Alt и сначала находится на одном уровне, потом начинает сползать вниз.
CTUN.BarAlt и BARO.Alt (с разницей в 4 единицы) тоже сначала находятся на одном уровне, а потом начинают сползать вниз, но быстрее чем CTUN.Alt.
CTUN.DAlt единственный остается на своем месте, т.к. стик высоты не трогается.
высоты на http://fotkidepo.ru:

PS Даже давление на датчике баро посмотрел, все так. То есть коптер со всех данных получает информацию, что высота падает, и не пытается предпринять никаких контрмер. Или я что-то не так понимаю?
Скорее всего ошибка прошивки.
Ну если бы программист просто знаком где-то ошибся, то аппарат бы просто рухнул 😃 После остановки он же выравнивается.
Но тут другое - явно у контроллера был какой-то резон начать снижать обороты. У меня для него придумывается только одно оправдание - он считает, что в горизонтальном полете подъемная сила винтов больше, и заранее компенсирует это снижением оборотов. Но это догадки, что там у него внутри - знают лишь немногие.
- Проблема с прошивкой. АПМ ведется на показания баро. Высота упала по баро, АПМ решает , что тоже надо снизить высоту.
Так если высота упала, ее же надо наоборот поднимать, разве нет? Там же видно, что DAlt (целевая высота) остается неизменной, а дельта растет - значит наоборот надо давать больше газа, чтобы скомпенсировать падение высоты, а он наоборот продолжает снижать, пока я его не останавливаю, после чего выравнивается.
Баро я не трогал, вообще не разбирал корпус. Пикс стоит под карбоновой площадкой, между ними расстояние ~3мм. На график выведено значение CTUN.Alt если я не ошибаюсь - это высота рассчитанная после фильтра кальмана.
нет доступа
А сейчас?
а остальные параметры не уменьшали? троттл рэйт по умолчанию?
Нет, все параметры не трогал пока. На старой конфигурации и так неплохо летал, а на новой пока первый полет как раз для подгонки.
У меня MP бета, т.к. новые параметры 3.3 в обычной версии отсутствуют.
На всякий случай продублирую лог: drive.google.com/open?id=0B0n-5xqp-dUQZlZzQ1k1LVNz…
видимо второй и первый мотор близки к максимуму поэтому контроллер ограничивает газ для того чтобы обеспечить приоритет стабилизации.
кстати сталкивался когда аппарат с неровно установленными моторами терял высоту а после исправления -проблема ушла
У первого и второго RCOUT в районе 1510-1530, у третьего-четвертого в 1420-1450, до максимума далековато как я понимаю, диапазон у ESC примерно 1150-1950. По Yaw весьма бодро крутится без потери высоты в обе стороны. Но я, конечно же, это в любом случае поправлю.
Посмотрим, уйдет ли проблема или нет…
ЗЫ. Смущает то что видно как контроллер специально обороты сбавляет.
- Да есть, но не по весу, а по вращению, видимо винты не вертикально стоят. Проверю. Но повлиять не должно было, запаса по мощности достаточно много.
- Полетный режим везде Loiter. Да, пикс. Полет был не энергичный совсем.
- Ок, обновлю, спасибо.
Такое ощущение, будто он считает по-вертолетному что в полете огибаемая (или как там правильный термин?) масса воздуха больше, и можно снизить обороты.
Нужна помощь.
В горизонтальном полете коптер снижает высоту. Причем он об этом знает, но все равно снижает:
График на http://fotkidepo.ru, по тыку открывается в полном размере:

На график выведены RCOUT1-4 чтобы были видны команды на движки, отмасштабированы формулой -1000 /50, т.е. держатся на уровне 1500, что примерно 50% по throttle.
Также выведен Spd отмасштабированый для справки, чтобы выло видно когда коптер летит, когда висит на месте.
Видно, что перед началом падения высоты коптер снижает обороты на всех четырех движках, после чего предсказуемо начинает снижаться.
Зачем он это делает, ИМХО никаких предпосылок к этому нет? Прошивка 3.3 rc11
Полный лог: www.dropbox.com/s/9qc15uqn3hn2c41/90.BIN?dl=0
Блин, может Вы перестанете спорить с человеком, у которого моторов ведрами…? Я Вам только что написал, что размеры по статору у обоих моторов, и ВЕ и ВХ одинаковые…
Ок. Откуда я мог знать что у вас BX тоже есть…
Be2212 - да, а bx2212 - нет. В серии BE цифры честные указываются, в остальных - не факт.
Это уже не критично, мне пока беззеркалки хватит, а потом раму и переделать можно будет.
У вас есть понимание, как из 680-й рамы вы будете делать 860-ю ?
Для беззеркалки взлетная масса может быть в пределах 4кг. Это скорее всего другие моторы. Или вы хотите сразу взять моторы, которые потянут потом 8кг?
Грузоподъемность нужна с запасом, пока GoPro с подвесом таскать будет а в перспективе Canon Mark3.
Я бы сказал что гексы 680 для марка с подвесом будет маловато. Ну то есть он сможет поднять, но очень ненадолго - минут на 5-10. Для беззеркалки нормально будет, но для зеркалки уже сильно мало. 3й марк с объекивом будет больше 1,5кг + подвес килограмма 2. Итого 3,5 кг подвешенной массы. Взлетная масса хорошо сбалансированного коптера будет больше 8кг при таких условиях. Удовлетворительное по эффективности соотношение ватт/килограмм с такой нагрузкой может быть достигнуто для гексы при пропах хотя бы в 15", т.е. гекса выходит минимум 860 класса.
Вообще меня эти моторки заинтриговали
Я бы не рискнул такие брать, хоть они и копеечные. Они не 2212 по размеру статора, а 2208 скорее всего. И что там про балансировку - неизвестно. Смотрите на серию BE лучше.
Привет, подскажите где можно взять алюминиевые стойки для рамы? Про@бал одну штуку. И к тому же приобрел доп.комплект пластин рамы (3й этаж сделать), а они без этих стоек шли.
Поставил третий этаж на пластиковые стойки, они чуть короче, но все нормально, для всякой электроники подходит. А вот верхняя пластина для аккумулятора стоит теперь на трех стойках, а под ней пиксхавк. Нехорошо… =(
Вообще каждый AV_IN должны идти парой проводков, желательно свитыми парой для минимизации помех. Так что земля по любому получается должна быть подведена к каждому входу. На выходе - будет земля автоматически. На входе управления переключателем земля тоже должна быть, нежелательно питать любые элементы, используя чужую землю, даже если такая минимальная нагрузка. Короче, в вашем случае ИМХО даже вопроса не должно было возникать – вести землю или нет. Ответ – вести.
если там не ноль, то нужно вести, так?
То значит что-то не так собрано и перепроверять.
В постоянном напряжении нет земли. Есть “+” и есть “-”.
Это вопрос терминологии. Не путайте человека. Электроны, кстати, бегают от минуса к плюсу, если быть точными. От плюса к минусу бегают “дырки”. А земля - это название для общей для всех элементов линии, на которую напрямую(!) запитана любая нагрузка.
Я тоже читал что DYS неплохи, но не нашел где их можно купить.
На ebay.
Помогите с моим вопросом про заведение земли везде куда можно, плз, Сообщение
Земля обычно общая. Но померяйте на всякий случай, есть ли разность потенциалов между землями от разных источников. Если нет - то все должно быть ОК, достаточно одной земли.
4S тянут. Тяжелее только rctimerовских…
Они 22г. 80г - это весь комплект с упаковкой наверное. Но BX2212 выглядят стрёмновато. Лучше на BE2212 смотреть.