Activity
Бывает так: когда тебе хорошо, то тебе просто хорошо. А когда тебе плохо, то ты начинаешь лезть на форум и постить о том, что тебе плохо и искать таких же несчастных. )))
А может ЕВ200 просто хороши в продолжении того, что я написал выше? И отсутствие этих очков в барахолке это косвенно подтверждает. )
и снова здравствуйте.
а я такое уже видел раньше. И чуть не сжег моторы.
И у меня, заметьте, контроллер не матек.
а на вашем еще и гира 20602.
А вы там пластиковыми стойками виброразвязку делаете.А так - да. F1 прикручивали болтами к карбону и норм.
Знаете, скорей всего Вы, и все кто говорил про виброразвязку правы.
ставлю на то что направление вращения моторов
Нет. С моторами все ОК.
Ниже стоит регулятор 4в1. На расстоянии 5-6мм (две капроновые гайки). Это может как то влиять?
Поставь 3.4.0 и попробуй я так решил проблему с глюками. Д а и не забудь стереть флеш перед прошивкой.
Поставил с очистной и снова с настройкой. То же самое.
Проблема в том что пропы не одели и не полетели.
Чтоб потолок и стены мне попортил? ))) Лучше дайте этот совет в разделе “Вопросы новичков”.
то есть виброразвязки нет.
подложите резиновые колечки 3*1,5 под полетник и гайки и попробуйте
Ну что Вы такое говорите. Что вы с этой виброразвязкой. Я не один коптер собрал. И такое вижу первый раз. И грешу на встроенную гиру. А Вы про развязки. У меня контроллер на коптере такого же размера вообще стоит на латунных стойках, а это считай жестчайшее крепление. Капроновые стойки хоть как то теоретически могут погасить вибрации.
Влад а прошивка 3.5.1 на этом пк?
Да. Но я и 3.5.0 ставил с сайта разработчика.
причины.
- полетник не виброразвязан. если вы используете стоковые резинки, полетник ни во что на раме не упирается, ничем не прижат сверху или снизу, провода силикон, то это отпадает.
Полетник виброразвязан на столько, на сколько это возможно. Он стоит вторым этажом на нейлоновых стойках. У меня рядом лежит коптер, у которого контроллер стоит на латунных стойках, при этом моторы побиты, пропеллеры ваще кривые, и такого “угара” нет.
- моторы/пропеллеры. если они, как вы говорите, идеальны, отпадает.
Моторы новые. Оригинальные. Они когда работают через конфигуратор - просто “поют”. Пропеллеры я даже не ставил.
- настройка фильтров. ну не знаю. обычно даже шумные сетапы на таких стоковых настройках должны чувствовать себя хорошо. ну ок - попробуйте понизить LPF1 Gyro и LPF1 D-term до 70 и 80 соответственно. не поможет - ставьте на LPF1 тип BiQuAD.
Вот тут я ваще ничего не понял. ))))
- пиды среднестатистические, D не задран. влияние маловероятно.
Какие пиды??? )))) Я пропы даже не одевал. В ПИДах все еще по умолчанию стоит.
- настройки регуляторов стоковые? почему oneshot 125? старые какие-то? может они не тянут гиро/пид луп?
Настройки регуляторов я все прововал, ДШОТ600 тоже - в мануале эти регули работают на ДШОТ600. Результат тот же.
Скажите, а неисправность гироскопа возможна?
поробуйте отсоединить поочередно питание каждого регулятора … если какой-то мотор имеет межвитковое замыкание или пробит какой-то регулятор , ток будет высокий , если хотите определиться с какого луча начать , положите коптер в четкий горизонт и покрутите моторами , мотор с самым высоким потреблением стоит отключать первым
Спасибо что помогаете.
Но хочу еще раз уточнить: когда коптер на столе, и я управляю моторами как по отдельности, так и по одному через конфигуратор - то все просто великолепно. Все четыре мотора на полном газу (без пропов) потребляют 11 ампер сколь угодно долго и работает чистенько и коптер лежит не подвижно и держать его совсем не надо. Но стоит мне отключить конфигуратор и попробовать сделать то же самое с пульта то начинается не стабильная работа коптера.
Я очень сомневаюсь, что проблема регуляторах и моторах.
Вот на скриншотах видно, что значения гироскопа очень сильно изменяются в течении двух десятых секунды, при этом коптер лежит неподвижно (ну его колбасит естественно). Может ли это быть проблемой гироскопа?
может у вас рама пластилиновая или наоборот из камертона сделана ))
включите через cli дебаг командой:
set debug_mode = gyro_scaled
запишите лог и выложите.потом:
set debug_mode = gyro_filtered
и тоже лог.
и тоже сюда положите.ЗЫ: и это - dynamic notch сознательно выключен?
Нет ), рама не пластиковая. Рама такая: Diatone 2018 gt-m200 ru.aliexpress.com/item/…/32841304146.html
dynamic notch - включил. Да, я пробовал его отключить.
У меня debug_mode = NONE.
Установил set debug_mode = GYRO_SCALED
dropmefiles.com/WkfUI
Установил set debug_mode = GYRO_FILTERED
dropmefiles.com/B8MEE
Такой же расколбас. После арма я при GYRO_SCALED газ не давал. Только арм. Во втором случае моторы запустились нормально, но чуть повысив газ началась тряска даже если я газ убрал в ноль.
Коптер 200. Контроллер: Матек F405 CTD. Там гира малошумная. Виброразвязки нет, используются нейлоновые стойки. Тока не говорите, что для такого размера коптера с великолепными оригинальными моторами EMAX RS2306 (которые просто поют при полной газе) нужна система с пружинами и масленными амортизаторами. ))))
Плата ориентирована верно, моторы расположены верно, вращение моторов настроено верно.
Добрый день.
Помогите разобраться с бешенством коптера при сборке.
Ситуация следующая: Собрал коптер, настраиваю в Бетафлай - все вроде отлично. Включаю моторы в бетафлай - великолепно все слушается и отзывается. Но если армлю с пульта начинается дикая тряска и ток подскакивает на моторах без пропеллеров до 54ампер.
Записал лог файл.
Но вот три скрина с интервалом в одну десятую секунду:
Еще раз подчеркну, что во время управления через бетафлай - все моторы отлично реагируют и отлично управляются.
Вот лог файл. Он коротенький: dropmefiles.com/qmJmJ (храниться шесть дней).
Что а это? Тут как бы тема про это.
Да я про то, что по этой ссылке уже продается! Хотя, конечно получше посмотрев, вижу, что доставка через два месяца.
Да, друзья. Извините. Действительно, я ваще не смотрел в пруф. (
Забавно, почему не использовать предназначенные выводы… ну да ладно.
на S5 подключили сборку?
если да то попробуйте нажать сейв в лед стрип. а потом передернуть питание (аккум) не отключая юсб. у меня после такого светодиоды загораются
На Матек есть специальный вывод под ЛЕД. В общем нужен “бубен” )))
И да! Еще проблема со светодиодами на OmnibusF4proV2 - тоже на выходе для светодиодов тишина.
Это не проблема inav, это только настройки/подключение, и каких у вас 3 вида (если inav и бетафлай поддерживают только WS2811/WS2812)? Вы документацию прошивок посмотрели (по своим платам)? Точно совпадают выводы для LED в прошивках?
Как не АйНав? Я же пишу: к контроллеру Matek-405CTR подключил сборку диодов из восьми штук. Под Бетафлай - все отлично. Под АйНав - тишина. Подключил другие диоды (сборка два модуля по четыре штуки) - тоже самое. При этом я ничего не менял, только прошивку. Тоже самое проделал на SPRacing F3.
Работают. (если речь об адресуемых 2812)
У меня три вида диодов. Все работают с бетафлай на двух видах полетниках (все, что есть для опытов). В АйНав ни работает ни один. Точнее по не понятным причинам зажигается один зеленым из всей линейки.
И совсем тупой вопрос: Led-strip (светодиоды) работают на INAV?
Вот прямо сейчас: есть контроллер Матек405, подключил диоды. В INAV в конфигурации разрешил использование диодов, и “зажег” их красным - нифига. Перепрошил контроллер в Бетафлай, сделал все тоже самое как и в айнав - все ОК, работает. При этом подчеркну, ничего больше не трогал, только прошивка.
И совсем тупой вопрос: Led-strip (светодиоды) работают на INAV?
Только-только “победил” INAV. Полетел со всеми плюшками (висит, возвращается, держит высоту).
У меня есть небольшой вопрос: Летаю на LiIo. На ОСД выведено показание стика газа. На новой батарейке показание стика газа при висении равно 35%. При просевшей батарее 50%. Т.е. чтоб висел надо понемногу в процессе полета поднимать газ. Думаю тут не стоит говорить, что если отключить все режимы и даже на подсевшей батарее коптер висит на 30% где то. Это говорит о том, что у меня где то, что то не настроего.
Подскажите, где поправить, чтоб коптер всегда висел на 50% газа (ну например, я этот стик хочу подпружинить).
Это не тлько моё мнение. Так как в основном летаем на самолётах, то в шлеме иногда проводим по часу и больше. Разница между ичайновскими поделками и шлемами с адекватными оптическими характеристиками просто драматически огромна.
Вам же говорят все, что это сугубо индивидуально!
Я и в гугловсокм шлеме (для мавика) плохо вижу, не фокусируюсь! И в Фэтшарках тоже, куча моделей, в том числе и HD3. Кучу очков перемерил - нифига. Ну может только в Еачайн ЕВ100 вроде норм, но по межзрачковому расстоянию не подошли. А вот в Walkera-овских очках все отлично!
Правда Скайзоны не подворачивались…
Вот сейчас, сижу ковыряюсь с коптером. Включаю-выключаю. Меняю провода питания (потоньше) и меняю приемник на L9R. Ну хоть бы раз отвалился компас! Но приеду на поле - нате, получайте.
есть у меня ещо подозрения что через раз определяющиеся датчики могут быть изза автодетекта. Что надо в конфигураторе поставить на авто, а именно нужный датчик И сейф&ребут. Проверяю. По результатам отпишусь.
Автодетекта нет. Все указано явно. Самое дикое это то, что в помещении все хорошо запускается. А при приезде в поле - начинает быть невидимым компас. При этом у BN-880 и компас и GPS-приемник рядом. К GPS вообще претензий нет - куча спутников, а компас красным и сваливается в настройках в FAKE.
бн880 не нужно никуда подтягивать. Он работает нормально. Вероятно нужно искать причины в питании, непропае или соединениях.
Спасибо, я тоже слышал, что этот сетап отлично работает. Завтра попробую пропаять все соединения. Но вот что касается питания, тут я не понимаю. У этого контроллера бэк на борту и плата полностью питается от него. Даже если я смогу использовать внешний бэк, как мне его подключить к этому контроллру? Ведь он уже питается от собственного.
а аппаратура включена?
Конечно. )
Добрый день.
Столкнулся с проблемой: в поле часто “отваливается компас”. Включаю дома - все ОК. Приезжаю в поле “нет компаса”. Тут вроде один раз получилось подключить по ubs - вроде все норм, следом подключил батарею - вроде заработало, но через какое то время вновь отвалился компас.
Вот такой полетник: F4 OMNIBUS V2 PRO ru.aliexpress.com/item/…/32773670265.html
Вот такой компас: BN 880 ru.aliexpress.com/item/…/32344549179.html
Где то читал, что у этого контроллера нужно шину i2c килоомными резисторами подтягивать к плюсовому проводу. Так ли это? И еще, в конфигураторе - показывается, что компас потерян, при этом на шине i2c ошибок нет. Проблема точно не в компасе, менял на Radiolink TS100 ru.aliexpress.com/item/…/32840972860.html проблема сохранилась.
Подскажите, есть решение?
p.s.: Вот сейчас подключил батарею - все ОК. ((( А пойду в поле - опять орать будет (
На Али уже с 7 марта продают, правда цена… А на Банке еще нет продажи.
Добрый день.
Скажите пожалуйста, управление летающим крылом есть в активах этого контроллера?
Добрый день.
Возможно это оффтопик, но все же спрошу тут. Вот у меня например прошивка INAV на коптере. И к примеру я хочу полетать в зале. Можно ли как то все же запустить коптер с INAV-ом в стаб или акро режиме без спутников и компаса?
Если есть тумблер в конфигураторе, который активирует моторы, то может есть такой же “тумблер” запускающий коптер без навигационном режиме?
Пришел MATEK F405 - CTR. Уже прошит BF.
Решил прошить INAV. Выбрал MATEKF405 и версию 1.8 от 1 ноября 2017.Прошивается. Но COM порта не появляется и светодиоды “пляшут”, то синий, то красный горит.
При этом этот ПК прекрасно прошивается под BF без всяких проблем.
Подскажите, что можно сделать? В чем может быть проблема?
Скачал с сайта разработчика 1.8.1 - завелось.
Пришел MATEK F405 - CTR. Уже прошит BF.
Решил прошить INAV. Выбрал MATEKF405 и версию 1.8 от 1 ноября 2017.
Прошивается. Но COM порта не появляется и светодиоды “пляшут”, то синий, то красный горит.
При этом этот ПК прекрасно прошивается под BF без всяких проблем.
Подскажите, что можно сделать? В чем может быть проблема?
И что значат слова
Спасибо. С помощью Вашего вопроса я понял, что я туплю. Я в смартпорт включал так: “S + GND”, как смотрел. Слева направо. Но там есть сноска: “если смотреть от SD карты”, это значит, что “S + GND” надо втыкать справа налево. Проблем бы не возникло ни у кого, если бы сервопровод был бы с ключем ориентации (маленькое удлинение коннектора).
Все прошил, все ОК.
Что через спартпорт, что через способ описанный на видео Юлианом все равно выдает такую ошибку. При этом перед выдачей этой ошибки на экране модули мигают красным. Прошивка аппы 2.2.1, прошивки для R9 и R9m от 7 февраля 2018. Даже имена сделал пять символов - все равно эта ошибка.
Куда жать? Помогите?!? )
Владислав, спасибо.
Все заработало. Надо было реверс одного канала сделать. Теперь все отлично. Три вида расходов и триммеры работают корректно.
Что воспользоваться шаблоном нужно загрузить не модель, а прокрутить вправо и выбрать “template”, тогда в списке появятся все шаблоны.
Что касается перепутанных каналов, может нужно сервы в приемнике переставить и/или в каналах реверс настроить. У меня летающего крыла и V-хвоста нет, шаблоны создавались из головы, чисто теоретически.
P.S. Может быть его нужно втянуть как шаблон и все наладится? Шаблон создан для порядка каналов EATR с автоматической перенастройкой на другой порядок каналов.
Спасибо, что помогаете разобраться в достаточно сложном вопросе.
По правде говоря, я никогда не видел в аппаратуре раздел “template”. Аппаратура Devo10, кастомная прошивка v.5.0.0. Что означает “а прокрутить вправо”?
По поводу перепутанных каналов: Конечно же я первым делом переткнул сервы (поменял местами). Принцип не изменился. Видимо действительно простая ошибка в написании конфигурации, т.к. триммеры работают правильно.
Попробуйте загрузить в чистую модель этот шаблон элевонов и посмотрите как там настроено. Там вроде все работает, и двойные расходы переключателем FMODE, и триммеры. Переменуйте файл в “elevon2.ini” и положите в папку “template”.
deviationtx.com/…/1308-elevon-and-v-tail-templates…
Скачал файл elevon2_2013-04-05.ini, переименовал в elevon2.ini, подключил пульт по usb, включил пульт удерживая ENT, пульт подключился в режиме usb, положил elevon2.ini в папку template. В папке template есть еще файлы: “4ch_dr.ini”, “4chsmpl.ini”, “6ch_heli.ini”, “6chplane.ini”, “heli_std.ini”. Но как ими пользоваться - понятия не имею. В меню аппаратуры я их не вижу…
Положил файл elevon2.ini в папку models: он там лежит, но в меню “модели” аппаратуры я его не вижу.
Да, я не опытный. Гонял тока на дронах. Научите пожалуйста, куда жать? Только не предлагайте на сонную артерию жать! )))
О!!! В папке models я переименовал файл elevon2.ini в model30.ini - вроде увидел. Ща буду биндить приемник и разбираться. Спасибо.
Да! Там все работает!!! ))) И триммеры вроде правильно отрабатывают. Но не бывает все так просто!!! )))
У меня почему то перепутаны “каналы” по стикам. Получилось так: Чтоб ЛК пошло вверх - мне надо правый стик отклонить влево, а не вниз. И так же повороты ЛК выполняются правым стиком движениями вверх-вниз. (
Добрый день.
Не могу разобраться в настройке летающего крыла (ЛК). Если с миксами вроде получилось: на каждую серву (канал) свой микс из пича и ролла. И сервы (каналы) вроде реагируют правильно на движение правого стика. И даже крыло полетело. Но летит оно не правильно и надо его донастраивать триммерами хотя бы. Но вот, теперь каждый канал (серва, а их в ЛК две) триммируется отдельным триммером!!! ))) Да и расходы не понятно как выставить. Ткните носом пожалуйста? ))). Прошивка 5.0.0.
Добрый день коллеги по хобби!
Очень долго веду неравный бой с INAVом.
То ПК были с компасом на борту (погоду показывали), то купил ПК без компаса, но почему то подключенный компас постоянно отваливался. Стал грешить на внешний компас. Купил новый модуль, подключил - то же самое. Ну решил уже до конца проверить теорию: подключил к SDA и SCL OLED-экран и активировал его в настройках конфигуратора. Итог: не работает не компас, а что то с ПК. Это значит, что у ПК есть проблемы по SDA и SCL. Заказал еще один ПК. Ну если и на нем не будет вразумительного результата, то я отказываюсь от INAV.
Но вопрос у меня вот в чем: Могу ли я этот ПК и gps (без магнитометра) использовать в летающем крыле? Там компас вроде разумно заменяется направлением движения и вычислением этого направления по GPS. Например у меня есть ОСД от Тарот, где направление на дом показывается от направления твоего движения, там в этом проблем нет и все работат, а как в INAV с этим дела обстоят?
Или другими словами: Обязательно в INAV для летающего крыла нужен компас?
Решение: Мои скрины правильные. Только на первой странице надо в Mux вместо “add” (как у меня указано), поставить “replace”.
в поле Mux на первой странице надо указать replace, а на второй add
а так - идея вроде правильная
Да. Вы правы. Так работает.
Странно, я думал надо добавить один и другой канал друг к другу.
Вот как написано в документации о replace и add:
Replace: Если этот микшер активен, все предыдущие микшеры игнорируются.
Add: Добавляет значение этого микшера к предыдущим микшерам.
Mult: Умножает значение этого микшера на предыдущие микшеры. Имейте в виду, что значения являются процентами, поэтому умножение на 50 означает умножение на 0,5.
Max: Выходом будет больше текущего микшера против предыдущих микшеров.
Min: Выходом будет меньше текущего микшера против предыдущих микшеров.
Delay: Задержка выхода этого микшера, когда используется с фиксированной кривой. Масштаб 100 представляет 5 секундную задержку. Может варьироваться с помощью масштаба или смещения.
Написано, что игнорируются, а по сути суммируются. Ну в общем решено я запомню. Спасибо большое.
Добрый день.
Долго разбирался. Не понял как настроить миксы на Дево10 под летающее крыло.
Аппаратура: Devo10, прошивка Deviation 5.0.0.
Пытаюсь настроить в этом разделе:
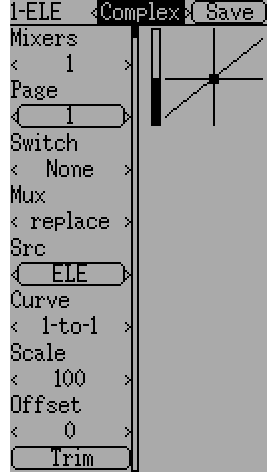
Но получается откровенная фигня, какая до дискретная манипуляция.
-Выбираю “комплексный микшер” на первом канале.
-выставляю, что будет два микшера (для летающего крыло).
-на первой странице выставляю:
-на второй странице выставляю:
И серва болтается как попало от минимума до максимума.
Не сочтите за труд, опишите тегами из прошивки как сделать элементарный микс на два канала для управления летающим крылом. Я постараюсь разобраться. Если не сложно, то скриншоты сделать - еще лучше )
Добрый день.
Долго разбирался. Не понял как настроить миксы на Дево10 под летающее крыло.
Аппаратура: Devo10, прошивка Deviation 5.0.0.
Пытаюсь настроить в этом разделе:
Но получается откровенная фигня, какая до дискретная манипуляция.
-Выбираю “комплексный микшер” на первом канале.
-выставляю, что будет два микшера (для летающего крыло).
-на первой странице выставляю:
-на второй странице выставляю:
И серва болтается как попало от минимума до максимума.
Не сочтите за труд, опишите тегами из прошивки как сделать элементарный микс на два канала для управления летающим крылом. Я постараюсь разобраться. Если не сложно, то скриншоты сделать - еще лучше )