Activity
Доброго всем дня.
а вот Олли на своих платах ставит на RESET конденсатор 0.1 на землю … это не противоречит документации на чип
По рыскал в интернетах, и действительно, есть вариация установки конденсатора на цепь сброса. Т.е. резистором подтягивается к питанию, а кондеем - к земле. Такое подключение дает некий эффект задержки при старте. В общем не буду объяснять, в интернете есть описание такой схемы.
Но вот меня интересует (к сожаоению, нет при себе контроллера storm32), есть ли резистор подтяжки на плате? Внутренняя подтяжка, это конечно хорошо, но все мои знакомые крайне настойчиво рекомендуют устанавливать резистор 10к, т.к. встроенная в чип подтяжка очень не стабильна.
Уважаемый Gapey, если у вас попадется такой “глючный” контроллер, посмотрите, есть ли там резистор подтяжки, и если его нет, попробуйте накинуть, возможно это поможет.
Но так если вас устраивает, то версию 1.3 ни кто не отменял, приобретите версию платы с НТ сенсором и будет у вас цельная плата с регулями и свежей прошивкой, а при необходимости сможете подключить и регули на НТ шину.
Или, может, я не понял вашу проблему/вопрос?
чё то переборщили как мне кажется
А вы сами посудите, человек (конкретно автор проекта, Олли) расширяет сферу применения, подобная схема удобна именно на больших подвесах, при ней не нужно тянуть пучок проводов к каждому двигателю и сенсору. Вообще, плата регуля с енкодером вполне компактная, при умении и желании (благо проект открытый) вы можете развести свою плату регуля и собрать компактный подвес.
Да и модульность конструкции имеет свои плюсы.
Кстати, я, для отладки, просто разместил 3 платы регуляторов (без енкодеров) на одной пластине, и от этой пластины развел провода к двигателям на механике. Получилось почти тоже, что контроллер с регулями, но на 2х платах 😃
конденсатор между сигнальным проводом и gnd прямо на провода поможет сгладить, но не увеличит точность
Доброго вам дня.
Мне кажется, стоит уточнить, какой конденсатор. На сколько мне известно, электролит при таком подключении ни к чему хорошему не приведет 😃 Мне даже интересно стало, что за “фильтрация” такая.
Признавался ранее,в схемотоехнике нуб. Переведите,пожалуйста. Модуль такой.
Супрессор - в простонародье “стабилитрон” 😃 видимо уважаемый lokanaft из более просвещенных чем мы с вами 😉.
Стабилитрон обычно ставят на плате контроллера, но не удивлюсь, если китайцы сэкономили. На модулях питания как то не наблюдал, может слишком дешёвые покупаю 😃, но 3.3В должен полетник обеспечивать своей схемой.
Эх,вот бы знать ещё,где эти ноги:)
Простите за нескромный вопрос. Вы самостоятельно планируете его “лечить”? Если да, то при наличии таких знаний электроники, как вы показываете, ничего хорошего, вероятно, у вас не выйдет. Отдайте его знающему человеку, или приобретите новый полетник.
Подключение пиксрейсер к аккумулятор и USB, в любом порядке, не приводит к выходу из строя самого полетника, проверено лично. Хотя у меня другая проблема, сгорел транзистор на выход спикера, когда я полетник включил без этого самого спикера. Прихожу к мнению, что качество компонентов в китайских пиксрейсерах, мягко говоря, отстой.
Смею дополнить… Имя точки/пароль, если правильно помню, pixracer/pixracer =))
Если я правильно помню, то изменить эти параметры можно только подключившись к полетника по WiFi. При подключении по USB, вкладка настроек модуля не отображается.
У кого блютуз модуль от pixracer-а нормально коннектится с Tower Beta или QGC на смартфоне
Открою вам величайший секрет Сия чуда… Оно, это чудо, работает не по ВТ, а по WiFi. Соответственно подключиться нужно по ВиФи к точке, которую шарит пиксрейсер, а в программе выбрать UDP, если не ошибаюсь.
Я ему напряжение мультиметром на выходе к регулю померить хотел
На сколько мне известно, у него нет выходного напряжения на этой колодке, только сигнал и земля. Полностью отключите его, оставьте на пару часов, проверьте БЕК, не сгорел ли он, хорошо бы нагрузкой проверить, лампочкой, кулером на 5в, и замерить напряжение. Полетник отлежится (уйдет остаточный заряд в ёмкостях), попробуйте ещё раз его подключить, но только к USB, без обвеса.
Проверьте питание контроллера, реверс газа. Установите прошивку qGroundControl, там в программе есть калибровка моторов, и она работает хорошо. Если в ней всё откалибруется, то проблема в ваших действиях, если не сработает, проблема в аппаратной части.
У меня так же были проблемы с калибровкой и работой через МП, в qGC проблем не наблюдалось на той же платформе.
lokanaft честно говоря, странная, на мой взгляд, компановка. Если не секрет, с какой целью контроллер был размещен именно так?
Возможно действительно есть смысл приобрести второй сенсор и повесить его основу подвеса?
Нет, мотор по оси яв начинает не в ту сторону работать и сам себя расколбашивает. Датчик же только один и контроллер не понимает, что теперь у ява реверс.
Может тогда стоит включить второй датчик? Может решение именно в этом? С одним датчиком подвес не выдерживает крены больше (грубо) 45 градусов, включаешь второй сенсор, тот что на самом контроллере, и можно вертеть подвес как угодно.
И все же, как его перенастроить под YI 4k? Вес 90 грамм…
Подвес работает, но при чуть больших наклонах, начинается тремор, еще чуть наклоняю, и камера падает…
Развесовку делать, по простому: методом проб и ошибок, балансируя грузиками, а небольшой дисбаланс электроника сама выровнять, правда аккумулятор чуть активнее будет высаживаться. Сложнее: проектируя новый подвес, т.е. его механическую часть. Выбирайте решение на свой вкус.
По треммору в крайних положениях, если включены оба сенсора, то рулите пиды и ток на моторах. Иначе, включите второй сенсор.
Ещё, у данного подвеса местами провода в натяг идут, они создают моторам лишнюю нагрузку. Лично у меня мешался провод от сенсора, я отцепил его, и у моторов пропала виграция в крайних положениях.
Как это делать рк командами? Чтобы допустим яв развернуть, когда стедик переворачиваешь камерой вверх?
Конкретно по РЦ не скажу. Спрашивали на rc group? Может Олли подскажет?
А если развернуть подвес, чтоб питч стал с другой стороны? контроллер позволит?
Без проблем, только в настройках для сенсора который под камерой поменяйте направление оси (вроде Х).
Не понимаю, как его отбалансировать с камерой Xiaomi Yi.
Просто потому, что подвес “рассчитан” под габариты развесовку ГоПро 4
Всем доброго.
питание +5в подал со стороны выходов
Подайте питание через порт power. Не во всех контроллерах можно подавать питание на колодках выходов (к примеру у меня так на пиксрейсер и сп ф3)
Думаю такое решение правильное
Нет, не правильно. У Pixhack v3 есть ещё порт serial 3 и 4, их можно настроить как телеметрийные. В худшем случае, подключите 3dr в порт telem1, а АТ9 и OSD портами rx в порт tx полетника, второй провод не используйте, он ни на OSD ни на телеметрии аппы не нужен.
Могу ли я использовать данный модуль вместо bluetooth для соединения с DroidPlanner-ом например?
Использовать можете, суть та же, канал передачи данных другой. Мешать будет, потому подобные вещи лучше использовать для отладки, при полетах на малых расстояниях.
После отладки, лучше поменять на модем с частотами 915/433 МГц
комплект PW-Link
Как вы правильно написали, это модуль для передачи телеметрии на мобильный или комп. Подключается к сериал порту полетника. С аппаратурой не имеет ничего общего, кроме частоты.
Да, ровно такая же проблема была. Мощность снизил, дабы снять нагрев (думаю ваши 45, вполне нормально), а пидами убирал биения.
У меня моторы в статичном состоянии грелись до 70-80 градусов, решил вопрос снижением мощности на них и регулировкой пидов (по факту, перенастроил контроллер через мастера)
Мастер немного понизил пиды, ушла вибрация при нагрузке двигателей (пальцем смещал с точки удержания)
Второй сенсор (на плате контроллера) включен?
А вот армить - никак…
Попробуйте перед армингом, жмакнуть сейфБатон, потом армить с аппы.
Чиффа
Поздравляю с “первенцем” 😃
Действительно, на видео видна небольшая вибрация, но нет предела совершенству.
Я думаю,есть смысл прибрать проводок от сенсора, а то он получается в “свободном полете”. У меня была мысль, заменить этот провод тонким каоксиалом, допустим, как у наушников (затычки/вкладыши). Возможно, такой провод удалось бы пропустить через оси ролл и питч.
Приветствую.
Не могли бы мне посоветовать/подсказать по подвесу/демпферам
День добрый. Сам не так давно связался с данной темой, потому мое мнение не прошу считать авторитетным, но поделюсь.
Мне кажется, ваши демпферы очень мягкие и нужно увеличить расстояние между ними, иначе ваш подвес похож на “грушу”, по видео видно, как она болтается по инерции, получается “маятник” и он убирает вибрации, но создаёт раскачивание.
Всем доброго времени суток. Подскажите, при сильном наклоне подвес начинает колбасить, пиды настраивать?
Я включал второй датчик, тот что на борту самого контроллера. На сайте олли (разработчик контроллера) есть видео в котором он показывает разницу использования 1 или 2 датчиков
Есть трекеры, ставят, есть парашюты, то же ставят, но важнее, такие сетапы не с проста такие дорогие, их проектируют спецы, собирают из проверенных компонентов, тестируют, и по окончании всего, они приносят большие деньги, так что, падают они редко и окупают себя многократно.
Михаил, мне кажется, вы зря тратите своё время и деньги (на бесконечные ремонты после крашей). У меня напрашивается лишь одна аналогия: вы садитесь за руль “фуры”, будучи без опыта вождения вообще. Послушайте совета людей, которые уже давно “в деле”, опустите планку, соберите классическую схему на раме 450. Благо такие квадры одни из самых дешёвых, в интернете море примеров их сборки/настройки. Он полетит из коробки, поймёте логику настройки (в т.ч. ПИД) и разбивать легче (в плане, ремонт дешевле).
На RC* нужно PWM заводить, можно сервртестером. Я так проверял свой подвес, когда только его получил.
Не, похоже зарядка в начале не то показывает. Залилось грубо 5000 , как раз половина емкости.
Если зардка IMAX B6, то снимите или увеличьте в настройках зарядки максимальный лимит ёмкости, он как раз 5000.
И куда подключен RCIN или FrSky порт?
А разве порт FrSky не порт для телеметрии?
SBus и PPM подключается на RCin
Добрый день Господа!
Хочу собрать такую штуку…
-
да, можно взять подвес Hackrc с Али, но для себя понял, что для компактного стедика, он не так уж и компактен, и малые ходы по питч и ролл, я буду печатать новый подвес с нуля. Нужен переходник USB-UART, на Али их море. Нужно так же, или 3 li-ion (li-pol) аккума, или повербанк + dc-dc повышающий преобразователь, в идеале, обеспечить стабильные, не менее 9В.
-
Если все же возьмете исходный вариант, крепление для соньки можете делать любым удобным, колхозным, способом, соблюдая требования по балансировка.
-
или в термоусадку и в герметичный корпус, или покрыть платы и разъёмы пластик71.
-
что бы провод не мешал подвеса, нужен очень мягкий и лёгкий провод. Хорошо бы его провести через втулки осей двигателей, но для микрофона это не полезно, т.к. нужен очень тонкий провод. Если микрофон не очень тяжёлый, может стоит повесить вместе с камерой на подвес и сбалансировать с учётом микрофона?
На сколько я понимаю, светодиод на датчике, это питание. Проверьте правильность RX/tx, по возможности подключить коротким проводом.
Есть ли вариант… - тумблер HOLD?
Меня этот вопрос тоже очень интересует. Знаю что на, допустим, sp racing можно повесить на тумблер арминг, а на пиксе так и не нашёл такую возможность, только торможение тумблером, но арминг делается стиками в любом случае.
С чего мне начать?
Спасибо
Как новечек новечку скажу, ничего сложного нет. АРМ и Pixhawk в базовой конфигурации схожи. Я начинал с PixRacer, на него документации и тем меньше, но мне хватило инфы по АРМ/Pixhawk, что бы собрать квад 250 и взлететь.
В первую очередь изучите распиновку всех необходимых коннекторов. Потом прошивка и настройка через МишинПланер. Периферии по минимуму берите на старте, уже потом будете разбираться как подключить ОСД, Телеметрию, подвесы и пр.
Для меня самым сложным были PID, и совместимость с регулями blheli, по незнанию купил второй набор simonk, с ними сразу всё полетело.
Олли почти родил плату версии 3.1 …
Спасибо за отличную новость, буду надеяться, что плату можно будет свободно купить, у меня не достаточно опыта и инструментов, что бы самому собрать её.
Я правильно понимаю, для новой версии нужны будут драйверы по шине NT? Может кто поделиться местом их приобретения?
чтото типа ATSHA204 …
Честно говоря, я затрудняюсь предположить, с какой целью она может использоваться в данном устройстве.
Проблема с STORM 32. В общем при включение моторы не работают
Как я вижу, вы питаете от 2х банок 18650, если у вас на плате стоят драйверы DRV8313, то питать нужно МИНИМУМ от 3х банок.
Гляжу, у вас там своя атмосфера, и пёс по кличке “пёс” 😃
Посмотреть бы на работу стаба в сильную качку, но как его инициал зимовать?
День добрый, уважаемые.
Подскажите пожалуйста, собираю карбоновый стедикам под камеру общим весом, примерно, 3кг, какие двигатели будут оптимальны на оси? Как я понимаю, для Яв нужен двигатель чуть большей мощности, чем на Питч и Ролл, т.к. он ворочает кроме камеры, еще и рамку камеры с двигателями.
у меня задача сделать на один джойстик ролл и яв, а на второй питч.
Порт POT, 2х осевой стик на контакты POT-0 и POT-1, а на контакт POT-2, отдельный переменник.
вот пришла мне плата с бангуда, не распаяная.
Конструктор? Не, не встречал 😃
а документации с контроллером не было(( как мне его распаять?
Я незнаю что у вас за версия и что за конструктор такой, но вот тут можно глянуть. Ну или на сайте разработчика
а можно ли к нему подключить не один а два джойстика?
Вот с хема с офф сайта:
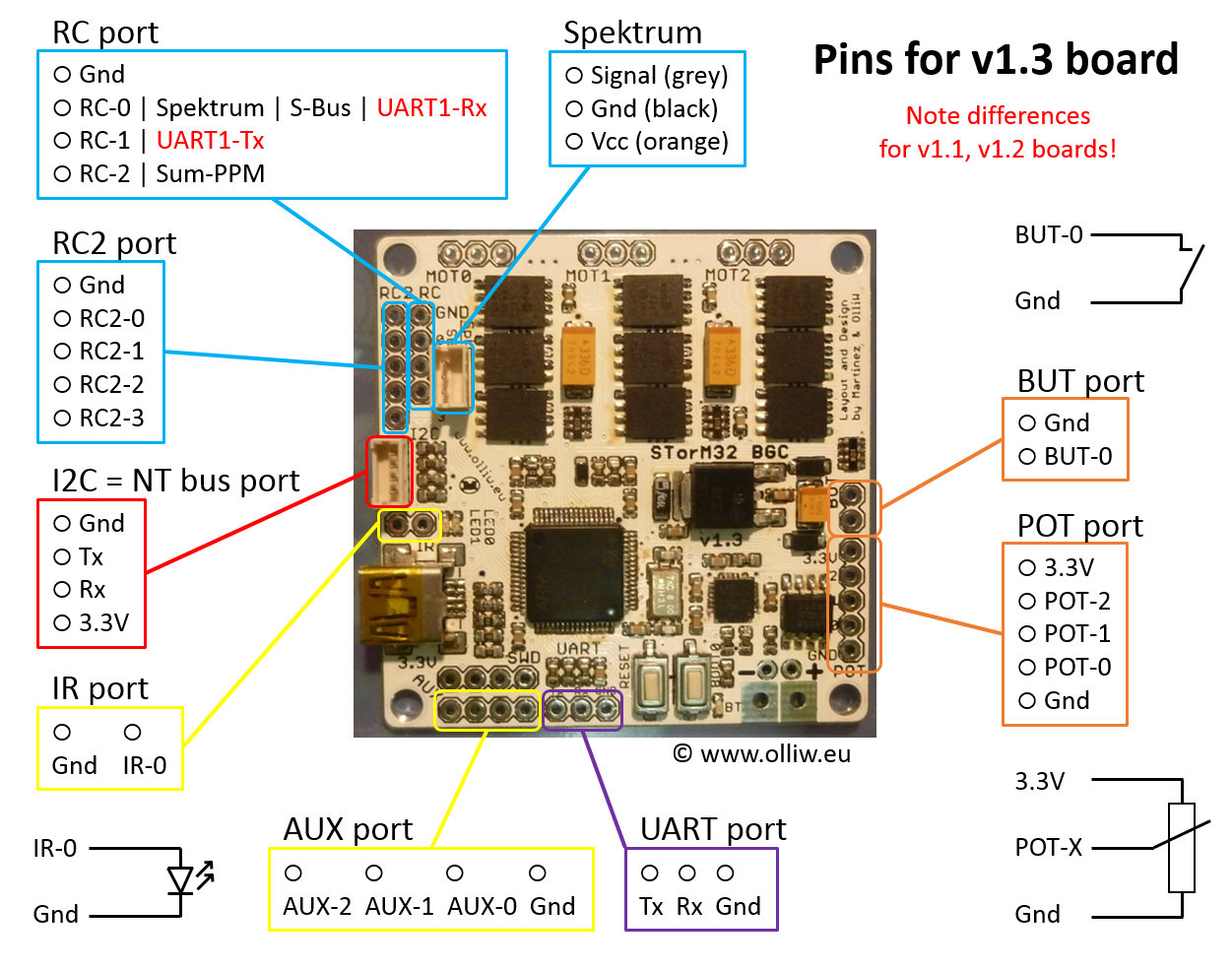
На ней порт POT имеет 3 входа, для каждой оси, это уже 2 джойстика (не видел пока 3х осевых джойстиков), так же, как я писал выше, можно каждую ось разнести на отдельный стик.
Ещё есть порт AUX, затрудняюсь предположить для каких целей он, но где то видел схему, где на этот порт вешали кнопки, но я и не вижу смысла вешать ещё переменники (аналоговые стики помимо 3х описаных выше) для каких то целей, может у вас какие интересные идеи, делитесь, я бы посмотрел 😃
Если же вы хотите использовать 2 джойстика параллельно, то для этих целей ненадо использовать аналоговые стики и порт POT, лучше повесить или на цифровую шину, или на разъемы RC через схему на ардуино.
Где можно купить моторы
Если подвес по типу HAKRC или подобного, куплен на Али/бангуде, то и движки там же можно найти, их там полно, ищите по маркировке.
Так же, простым поиском в гуугле, можно найти множество предложений любых моделей.
Предположу, что вам нужен такой, опять же, смотрите маркировку на своем.