Activity
При срыве синхронизации уменьшают тайминг.
Указанный параметр больше влияет на старт.
Насчёт тайминга - спасибо, учту!!
А вот касательно Startup Power - не смотря на название, вводящее в заблуждение, этот параметр вроде как отвечает за разгон вообще. То есть насколько резко мы готовы раскрутить мотор, как с самого начала, так и просто для ускорения. В предыдущих версиях то ли прошивки то ли документации, он назван как то по другому …
Вы сначала пишите про Блхели, а потом про Блхели32. Это разные реги, соответственно разные прошивки.
И, прога для Блхели32 не видит Блхели (разная разрядность).
Да, на тот момент я даже не знал что бывает BLHELI а бывает BLHELI32 😃
В целом всё получилось, доволен подходами к работе с регулями.
Коллеги, не знаю, для этой ли темы вопрос или нет - подскажите что крутить в настройках, если Блинчиковые медленные моторы MT3506-650kV теряют синхронизацию при работе от 4S ? Инфы в инете крайне мало, единственное что нашел - кто-то поборол эту проблему, увеличив Startup Power с 0.50 до 1.25. Я вчера это сделал но пока не летал. Что ещё посоветуете?
Взять arduino, удобно nano, для подключения по USB без чего либо дополнительного.
Запустить blhelisuite, оттуда выбрать свою ардуино и записать код программатора.
Далее взять сервокабель, D3 сигнал, любую землю.Можно писать читать.
Да, для разных бутлоадеров разная прошивка программатора, для atmega и silabs.
Сергей, спасибо! Соорудил Nano, прошил в режиме “Make Interfaces” - Arduino BLHeli Bootloader.
Сам программатор программа теперь видит, однако соединяться с регулями не хочет. Чую это может быть из-за того что мои регули Silabs. Но! В моей версии Blhelisuite32 (скачал сегодня) нет выбора прошивки для программатора. Написано что вроде как она одна для Blheli32, и для Atmega и для Silabs…
В чём могут быть грабли?
P.S. Заметил интересную штуку - в этой Прошивке программатора “Arduino BLHeli Bootloader” справа есть квадратики “опции”. Там есть L (BLHeli32 Bootloader), и C (SILABS BLHeli Bootloader (USB/CON)
Интересно что в выборе интерфейса в меню ввехру я могу выбрать K, L, M, но нету ывбора C
SOLVED: Каким то образом я умудрился скачать и два часа просидеть в blhelisuite 32
Коллеги, подскажите, какой в моём случае самый простой способ настроить регули, на которых установлен BLHeli (регуляторы - ZTW Spider HV Pro). Читаю уже час про BLheli, и не могу понять, можно ли это сделать без подключения напрямую индивидуально к площадкам проца. Раньше этим никогда не занимался
Напрашивается вариант подключения через 1-wire, через серво кабель, но при этом упоминается два способа: - CleanFlight и специальный USB программатор.
Увы, ни того ни другого нету…
Есть всякие там Ардуины, STM32, AVRISP, FT232, CP2323.
Как? ))
Коллеги, подскажите, как то можно включить композитный видео-выход в стандартном образе EZ-WIFIBC ?
Товарищи, такой полу-философский вопрос. А чем данная система радиоуправления может быть хуже обычного 2.4 FrSKY ? Начинаю переползать на LRS, но не люблю пользоваться сразу разными стандартами. Подумалось тут, а может полностью перейти на всех модельках только на Baychi LRS?
- На любую железку, подключенную езернетом, можно зайти по ssh и глянуть dmesg
- Не факт, что будут иметься в наличии драйвера
- Определение поддерживаимости карты и пляски с настройками - в .profile рута
Спасибо!! Вчера также поизучал Вашу летнюю сборку, а именно diff. Начал что-то понимать…
С Эзернетом у Зеро конечно беда, но я думаю найдём решение.
Товарищи, подскажите, почему могут не работать WiFi адаптеры, которых правда нету в официальном списке поддерживаемых? (Но Rodizio где-то говорил, что работать, теоретически, будут все адаптеры, которые поддерживают нужные режимы)
Имею работающую комбинацию на базе AR9271, всё работает чудесно.
Пробовал в качестве и RX, и TX ставить модули на базе:
RTL8187B,
RT2571W
Несмотря на то, что оба поддерживают режимы мониторинга и инжекций, и прекрасно работают в Kali, не работают с WifiBC
Судя по RX оно даже не пытается перевести модуль в режим мониторинга, после чего начинает жаловаться что Card Not Ready или что-то в этом роде.
Также, вопрос, - EZ-WifiBC вообще пишет куда-нибудь логи, типа dmesg? Чтобы можно было после посмотреть. А то тишина, и непонятно куда копать…
90% общедоступного софта ориентирован на анализ wifi-сетей, который даже трафик от wifibroadcast просто так не покажет. И не важно, кали там или что-то другое, ничего такого особенного в кали нет.
Перефразирую вопрос - имея под рукой Kali со всем встроенным (и не встроенным) арсеналом ПО, а также WiFi приёмник, настроенный на режим мониторинга - можно ли просканировать эфир 2.4ггц на предмет замусоренности?
Понятно, что просто сканировать Точки Доступа - многого не даст
Другие средства в тех краях демонстрируют трэш, угар и содомию в эфире.
Любопытно…
Скажите, а с помощью Kali можно просканировать эфир так же, как и Другими Средствами?
У меня по маме все родственники !ам. Пос. Им. Воровского
К сожалению, теперь там бываю нечасто, война.
Знаю, это чуть дальше в сторону Мурома 😃 У меня обратная ситуация - куча родственников в Одессе и Мелитополе, и тоже давно не был … :/
Да, Вее летал, очень неплохо.
Есть проблема, 2,4 очень засран, я ушел в 2,3
Я ушел в круговую поляризациб, можно прпыиаться уйти в горизонтальную
[/QUOTE]
В общем я однозначно буду делать пока Vee чисто исходя из трудозатрат.
По идее, там где летаю я (и Судогодский край и Истринский район), тишь и гладь )) На комп с Kali ловятся какие то жалкие ничтожные пару соседних роутеров. Хотя, вероятно, в диапазоне может присуствовать что-то и не-вайфайное… Понятно, что всё надо промерять другими средствами…
Судогда это во Владимирской области?
Какое управление будет?
Судогда, да, Владимирской, а что, земляки?)))
Я пока только раскуриваю тему, но есть очень большое желание чтобы управление было через EZ-WFBC / mavlink же. Насколько я понимаю, в кастомных прошивках это возможно пока далеко не везде, но в родной вроде всё это работает.
Лежит также уже сто лет модуль OpenLRS на 433. Но катастрофически не хватает времени сесть и с этим со всем разобраться. Как я понял, решение далеко не коробочное, хотя последний раз тему эту изучал пару лет назад.
Покритикуйте/посоветуйте плз выбор решений… Может кто летает на OpenLRS? Сложна ли сегодня настройка?
P.S. Константин, у вас же как раз VEE на передачу? Нормальное решение?
Товарищи, всех с Новым Годом! Подскажите, какие антенны на передачу лучше сделать для обычного ( не рекордного ) Ez-WifiBroadcast?
Планирую использовать диапазон 2.4. Для 5.8 есть всякие там клевера, вот думаю, нужны ли они мне на 2.4, или ограничиться обычной поляризацией?
Дома лежит довольно много разных антенн (крупных, поэтому на приём), поэтому склоняюсь к обычной поляризации.
Вроде слышал что кто-то тут летает с VEE, но как назло не могу найти это сообщение. Стоящий вариант?
Товарищи, подскажите, пожалуйста, по настройкам ПИДов на CleanFlight 2.4.
Имею обычный ZMR 250 с уже не помню какими, традиционными моторами. Летал на какой то древней прошивке типа LibrePilot, всё было отлично. Сейчас поставил CleanFlight, но боюсь взлетать, так как реакция коптера кажется крайне вялой. В руке очень слабо сопротивляется наклонам. Картина пидов у меня сильно отличается от тех множеств вариантов, которые я нашёл в интернете. Порядки цифр совершенно другие, см скрин.
Посоветуйте, пожалуйста, примерные рабочие настройки, с которыми я смогу хотя бы взлететь. Дальше разберемся
P.S. Почему то у меня вообще нет выбора PID_CONTROLLER, и переменная такая в CLI не выставлена…
Можно, люди отписывались. Но без OSD, чистое видео.
Спасибо!
А подскажете, добрые люди, где это можно нагуглить? И так и эдак искал, никаких следов.
Малинки 3 все распиханы, только зера одна нсталась для AirPi, а попробовать хотца.
P.S. Вчера неожиданно обнаружил у себя в закромах 3 разных WiFi свистка, и, о чудо, они все на поддерживаемых чипах
Коллеги, чувствую, что вопрос глупый, но,
Можно ли обойтись без Raspberry/Nanopi На приёме? То есть принимать видео прямо на Комп ? Казалось бы задача должна быть несложной… Или?
Товарищи, а кто на каких разрешениях летает? Есть у меня например любимый телек 720p. Надо ли мне стремиться к 1080p? (однозначно ли это хорошо, или потеряю в дальности, и т.п? )
Систему пока только собираю, интересуюсь заранее.
Как видим по этой теме - ни у кого он нормально не работал.
известно чем
появилось вот это
rcopen.com/forum/f90/topic515083
и весь этот инсайт стал никому не нужным барахлом.
Всем спасибо! Оказывается я отстал от жизни сильнее, чем полагал))) Изучаю с интересом))
Товарищи, так чем дело то закончилось с этими комплектами? Стоят своих денег? Какова реальная дальность?
Если смотреть сверху платы,то есть со стороны где припаяно всё.И центральная микросхема и сам широкий разьём,то повернув этим разьёмом к себе,как раз и получается,что именно с левой стороны этого разьёма и есть эти проводки.Два крайних питание и третий ППМ. На вскидку сейчас точно уже не скажу,но скорее всего под ЛибреПилот у меня были задействованы все каналы.То есть,я подключал по ПВМ методу.Поканально.У Юлиана есть старинное видео,где он подключает всё и показывает как. Но К Опен Пилот системе. (Либре это тоже самое). А вот когда я залил в CC3D прошивку ИНАВ 1.7.3 ,руководствуясь материалом вот отсюда rcopen.com/blogs/22882/21422 ,то там уже можно полноценное ППМ подключение через первый (1) канал на ППМ приёмничке.Но если залита прошивка с указанием этого канала. Вот её название inav_1.7.3_CC3D_PPM1.hex
Роман, ещё раз спасибо! И руководство по iNav как раз в тему, ибо после LibrePilota как раз собирался ставить именно ее.
По своей проблеме - погуглил хорошенько, не я один с этим сталкиваюсь. Похоже просто кривонаписанная прошивка или конфигуратор. Люди тыркают куда попало по 10 раз, перезагружают плату (этого я кстати не делал в процессе), после чего всё внезапно начинает работать.
В принципе CPPM должен работать и в 1 пине порта приёмника, и в восьмом, и через Флекси порт… Просто почему то настройка реализована через хитрозакрученную жопу
Не.Никуя не туда.В белый широкий разьём надо подключать приёмник.Если поканально как на видео надо.А если по ППМ,то только три проводка.Слева направо… Первый чёрный,второй красный,третий это сигнальный. Ну и на приёмнике самом в ППМ разьём,не путая млюсов-минусов. Вот видос,где показан этот широкий разьём. Я лишние проводки вытащил,оставил только эти три крайние.Всё супер.
Роман, спасибо, видимо так и буду делать
Но интересно то вот что - минуту назад, до перепрошивки оно прекрасно работало в этом порте FLEXI…
P.S. А разве 1,2,3 проводки оставляем? Вроде восьмой там за PPM-SUM отвечает (на стороне CC3D). Можете проверить, как лично у Вас сделано?
Товарищи, подскажите, что может быть не так?
залил на днях свежий LibrePilot на древний свой CC3D. Перед этим убедился что всё в принципе работает. После прошивки не определяется PPM-SUM от моего FRSKY. Ничего не менял, включая физические подключения, и настройки. И хоть ты тресни, никаких данных с пульта.
Подключен он у меня был через FLEXI порт, при этом правда в настройках почему то была (и работала) вот такая картина:
После перепрошивки перепробовал все варианты настроее FLEXI и Receiver порта - всё, приёмник мой не распознается.
Как вообще принято прописывать FRSKY в FLEXI порте? Может есть какие то особенности которые я позабыл.
Мне они когда то помогли с электронной книжкой, сказали, что сами ремонтировать не будут, типа книжка старая и ремонт выйдет дорогой, вроде как нет смысла, но деталькой помогли, правда тоже не за дорма 😃
Увы, только что сказали что “этого давно нет в наличии”
Всем спасибо за интересные ответы! Хотя по разным причинам некоторые из них всё же шаг в сторону )))
На тиньках народ такое действительно делает, но для меня это непростительная суета)) Программить, дебажить, прошивать. Но есть плюс - запоминание стасуса включенности в EEPROM на случай косяков по питанию
Пока остановился на варианте специализированной микрухи MAX16054 (хотя и 150 руб, довольно непростительные деньги для такой хрени )) )
Однако, если вдруг кто-то найдёт аналог pt1502 (и кнопка, и контроллер питания, и зарядник LiPo), - свистните!!
P.S. Я со скептицизмом отнесся к предложению alek_j касательно поспрошать в СЦ Texet, но похоже это может сработать)) Веду переписку
Коллеги, посоветуйте пожалуйста решение, ищу уже неделю (или подскажите как правильно искать))) ). В общем для питания слаботочной батареечной схемы (<500mA) нужна реализация включения и выключения по одной кнопке. - Желательно даже чтобы это сразу было готовое решение типа микросхемы ( с пирогами типа антидребезга, и СразуРабочая))) )
- Идеально, если это будет DC-DC конвертер для питания от 3-4.2В со встроенным Контроллером Кнопки Включения…
Хоть ты тресни, чую, такое решение есть на рынке (включение питания всяких там телефонов, электронных книг и кучи ещё чего), однако перепробовал тысячи поисковых запросов, не могу найти!!
Нашел одну микруху, просто идеально мне подходящую, но она есть только в китае, а мне надо сейчас. Зато в ней есть всё что нужно современному мужику - и включение по кнопке, и контроллер заряда ЛиПо, и DC-DC, и сигнализация LowBattery… Сказка просто… ( PT1502 за 40 руб…)
Так что вполне себе можно на принтере делать RC-шки. На нем это делается да же интереснее, чем когда готовую покупаешь.
То, что интереснее - это однозначно!! главное чтобы не сильно уступать в стоимости и в качестве.
Смотрю ваши модельки, очень интересно. Скажите, где покупаете Nylon и Rubber/Flex?
P.S. А если дальше по Вашим ссылкам полазить, то вообще очень интересно)) Особенно понравились самолёты!
Павел, очень интересное сообщение! А можете привести пару примеров из моделей, которые Вы печатали? Я как то пока, после обсуждения в данной ветке, охладел к OpenRC Трагги, но тут как назло вчера увидел Jeep на thingiverse, и опять захотелось)))
какую таблицу с характеристиками брали для просчета?
Никаких просчётов, только хардкор 😃
Информации по этим моторам нигде нет никакой. Была только эта табличка от производителя (HengLi W4220 650KV) - 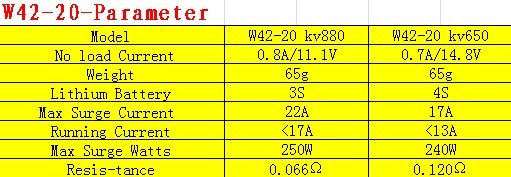
Где то ещё видел картинку с тягой, на батарее 4S
А ну ж раскажите что получалось по таблице и какой выдающийся результат получился наугад?
Боже упаси, ничего выдающегося. Для меня неплохой результат:) Раньше у меня всё летало 10-15 минут, а тут 20 минут полета (не висение) из коробки.
Итак, 3s5200mAh, multistar 4220-650kv на 12ых пропах, 1600грамм полётный вес, с подвесом, камерой и FPV.
Вероятно, либо оставлю так, либо попробую 13ые пропеллеры. Также, возможно попробую 4s, но у кучи народа проблемы с 4s и этими моторами.
а если смотреть не на отзывы, а на таблицу с характеристиками мотора где для мотора и пропа для разных значений газа приводится тяга, …, мощность и эффективность?
Если смотреть на характеристики, - то возможность полёта на 3S даже не обсуждается 😃 У меня же наугад получился неплохой долголёт 😃
Здорово собрано,красиво.Ставлю плюсик =)
PS Слышал что удлинять 5.8 не стоит , потери большие будут.
Действительно, очень классно всё скомпоновано! Разве что убивается один из изначальных плюсов TBS - компактность по высоте.
Подвес такого рода нормально держит вибрации? Я у себя пока сделал некрасиво но надёжно…
Да, каждый разъём, и каждый сантиметр кабеля даёт неслабое затухание. Кабелем ещё можно пренебречь, но в разъёмах можно потерять существенную мощность. Совершенно не помню точных цифр, но приводилось чуть ли не 3дБ потерь в кабеле с двумя SMA разъёмами на частоте. Это потеря мощности в 2 раза
а мотор не отломит крепление? на вид слабенькое
Крепление действительно выглядит слабеньким, но я пытался его сломать руками (в рамках разумного), - не получилось.
а цт проверяли? У вас по идее сейчас должна получиться сильно передняя центровка. Если конечно акк сильно взад не выдвигаете.
Да, приходится сдвигать батарею назад, но в общем в рамках приличия. Зад аккумулятора выглядывает на пару см. Вообще очень давно уже есть идея сделать подвес по человечески, благо чертежей хватает. Но как то не нравится, что подвесы такого рода (напечатанные для TBS) имеют нестандартную балансировку. Мой просто снизу подвешен к кронштейну, и работает как обычный подвес. Подвесы же для TBS, имеют сложную систему подушек, которая, как мне кажется, работает хуже (чисто ИМХО, интересует опыт кто пользует)
P.S. Вчера, как видно из одного фото - аккумулятор вообще вывалился, но это никак не повлияло на управляемость коптера!!!))) (возможно повезло, ибо он висел примерно в той же точке, в которой до этого был закреплен.
Multistar 4220-650kv.
Да, вспомнилось, 4s они, по отзывам, плоховато держат. Но возможно попробую
Отчитаюсь немного по полётам. Итак, пересобрал TBS под 12ые пропеллеры. Для этого поставил удлинненные задние лучи, передние пока оставил. Получилась равносторонняя схема X (расстояние между передними лучами теперь равно расстоянию между задними)
Перебрал множество вариантов 3D моделей креплений, в итоге нарисовал сам (популярное в этой теме крепление имеет высоту на 4мм ниже оригинала!! Причём заметил я это уже к самому концу). Модели лежат тут: www.thingiverse.com/thing:1939287/#files
Вот что получилось:
Как видите, модель хорошо справляется с внезапной потерей балансировки))) Я это заметил только когда коптер вернулся…
Порадовало время полёта. за 4:45 минут из батареи 3S 5200mAh было высосано 1250мАч. Т.е. время полёта на этой батарее - 20 минут. Видится мне что коптер легко выдержит и батарею 10Ач
Из минусов - коптер висит при 55-60% газа, возможно надо либо удлиннять лучи до 13, либо переходить на 4S
Тоже про такое думал.
А в APM какую конфигурацию рамы поставил?
Обычный X
Пока особо не было возможности полетать. На выходных доложусь
Ак побольше, убьёшь два зверя, центровка и время полёта. Я как 5000 4С ставлю, так центровка ок.
Да вот подумываю над этим… Но очень не хочется, если честно, морочиться с питанием дополнительных комплектующих вроде камеры, передатчика и подвеса…
Вчера подлетнул дома на 12ых пропеллерах, и 3s батарее. Не понравилось то, что Висение достигается при газе в 60%… Или ничего страшного, если я не планирую летать как угорелый?
А пиды одинаковые для roll и для pitch?
Не, пиды разные на порядок, но причина этому это уже наверное другая особенность данного коптера - разные расстояния между передними-задними и левыми-правыми моторами.
Всем спасибо за советы!
Итак, чтобы подытожить - хочу сделать вот так:
Нужно будет всё просчитать, но пока картинка получается неплохая 😃
Вот только подзадумался - у меня и так довольно передняя центровка получается из-за подвеса, а в таком случае получится ещё более передняя…
Делаю удлинненные лучи, в связи с этим возник вопрос - стоит ли сохранять эту присущую TBS Discovery особенность в разных расстояниях между задними и передними моторами ? Может удлиннить задние лучи, и сделать коптер похожим на обычный f450? Не знаю как у Вас, а у меня коптер не очень хорошо себя ведет при поворотах по YAW, и как мне всегда казалось - причина именно в этом. Разный момент на диагональных моторах заставляет коптер клониться при разворотах (рама в настройках APM, разумеется, указана верная)
К величайшему своему удивлению не нашёл никакой информации на форуме об этом проекте. В то время как на Youtube много видео, свидетельствующих об успешной эксплуатации машин, сделанных на его базе, включая Трагги и Formula1
Подскажите, кто имел с этим дело? А также, быть может опытный глаз автолюбителей может зацепиться за что-то, что принципиально не так. (у самого опыта в RC машинах нет никакого, просто люблю что-то делать своими руками, и давно поглядывал в сторону RC авто). Конкретно в моём случае - цель - порассекать по легкому бездорожью, без прыжков.
На первый взгляд может показаться, что машина, да ещё и багги, должна рассыпаться в клочья 😃 Тем не менее сам уже имею некий опыт печати довольно крепких деталей, да и видео в интернете показывают, что вроде как всё не рассыпается 😃
Так отключите его физически. Надежнее будет. Только проверку не забудьте отключить.
В принципе как вариант сойдет, но я бы хотел чтобы:
- Коптер всегда понимал в какую сторону он повернут (соответственно все навигационные функции компасом пользовались)
- Но не старался удержать нос, когда ему кажется (исходя из компаса) что он уплывает.
Ибо, может я отстал от жизни, но раньше полное отключение компаса было все же чревато. Например у меня лично была ситуация когда, при неудачно сложившихся обстоятельствах, при участии ветра, самолёт неверно сориентировался, и начал улетать строго по ветру от меня. Еле нашёл…
P.S. Кстати вместо отключения физически, по идее можно использовать MAG_ENABLE=0. Или, возможно, вы это и имели в виду
Товарищи, подскажите, как отучить APM корректировать ось YAW по компасу? Раньше проблема решалась с помощью опции COMPASS_USE = 0, сейчас почему то эта опция влияния не оказывает.
Симптомы такие - нос коптера, при висении на месте постоянно плавает градусов на 10 туда - сюда. Хотелось бы, чтобы как в старых добрых контроллерах - нос корректировать только по гироскопу.
Ещё пару сотен сеансов калибровки по различным методикам не предлагать. Возврат домой и Loiter работают прекрасно. Беспокоит только висение и ось YAW.
P.S. Или, быть может, кто хорошо разбирается в ПИДах - как ограничить влияние на ось YAW компаса с помощью ПИДов этой оси?
Товарищи, подниму немного тему. Задумал тут поменять линзу на без-фишайную. Где нынче модно такие заказывать? Интересует как такой же FOV, так и поуже.