Activity
Я предложил проверить цифры, введённые в конфигураторе - могли опечататься при вводе.
я их вообще не трогал, как по умолчанию было, так и оставил. Это во второй вкладке ПШЕК конфигуратора?
Или для проверки точности излучения по частоте?
Предполагаю такой вариант: сводим все частоты в одну. Смотрим на шарпе где они барахтаются у одного модуля и у второго. Если есть сдвиг - сносим один из модулей на этот сдвиг. Потом возвращаем все частоты с учетом сдвига. По идее тут уже не важна точность донгла, все замеры будут относительно системы координат модулей. Может я ошибаюсь, но когда доберусь возможно попробую. Хотя сама идея задержки от сдвига частот меня немного смущает. Вот сила приема зависит это понятно.
Я так понял, что “опрос” каждого канала идет последовательно и поэтому появляются задержки и рывки
Заметная задержка в управлении может быть если на одном или нескольких каналах не совпадают частоты в настройках передатчика и приемника. Стоит перепроверить.
Спасибо, проверю. Даже знаете, найду время и попробую увидеть что sdrsharp’e будет показывать донгл. Хотя работать с ним особо не умею, больше по наитию.
Еще бы знать как заставить модули излучать только на определенном канале, а то чую там каша будет на частотах
У меня такого не наблюдалось.
А задержка по управлению и отсутствие плавности движения сервоприводов есть? 433 модуль?
Скорость телеметрии (9600) нельзя увеличить? Может поэтому на пару секунд запаздывает?
А если подальше от самолета?
После перезапуска всех свистоперделок повторения эффекта не обнаружил. Даже не знаю откуда он взялся, пытался повторить - не вышло. Пугает одно: а если такое в небе произойдет? При этом всём в самолете видеокабель из экранированного usb кабеля. Из него же провода от полетника до лоры на крыле.
Ребята, всем спасибо за помощь. Без вас не справился бы. Телеметрия запаздывает секунды на две. Сейчас изучу результат, сделаю выводы и проверю в выходные в поле, если погода позволит. Сейчас начну систематизировать полученные знания и опыт, дабы написать мануал для таких же свистков как я. Спасибо еще раз, доброго вам неба!
На полетнике управление в rx2 из aux модуля, телеметрия rx модуля вставлена в tx3 полетника (первая картинка).
В tx2 его вставить не получается, сбрасывает настройку в конфигураторе inav.
На приемнике лоры во вкладке телеметрия: скорость 9600, тип Mavlink;
На передатчике 9600, Mavlink; вставлен M0 в SPort приемника аппы;
на приемнике аппы ничего не менялось, инвертор с модуля лоры по управлению sbus, которое работает;
На пульте все также настроено (когда была телеметрия) как и если бы приемник аппы был подключен напрямую к полетнику в самолете.
Телеметрии нет. Волосы на голове уже заканчиваются. Может кто видит ошибку
P.S.: поставил на передатчик лоры Mavlink slave. Получил телеметрию. но какая-то она странная. Изучу сначала результат
Просто мавлинк
На приемнике в самолете который стоит, что-то во вкладке телеметрии настраивать нужно?
И еще. При работе руддером сходят с ума все сервы. Даже видео снял
протокол мавлинк
Просто Mavlink encapsulation или MASTER/SLAVE?
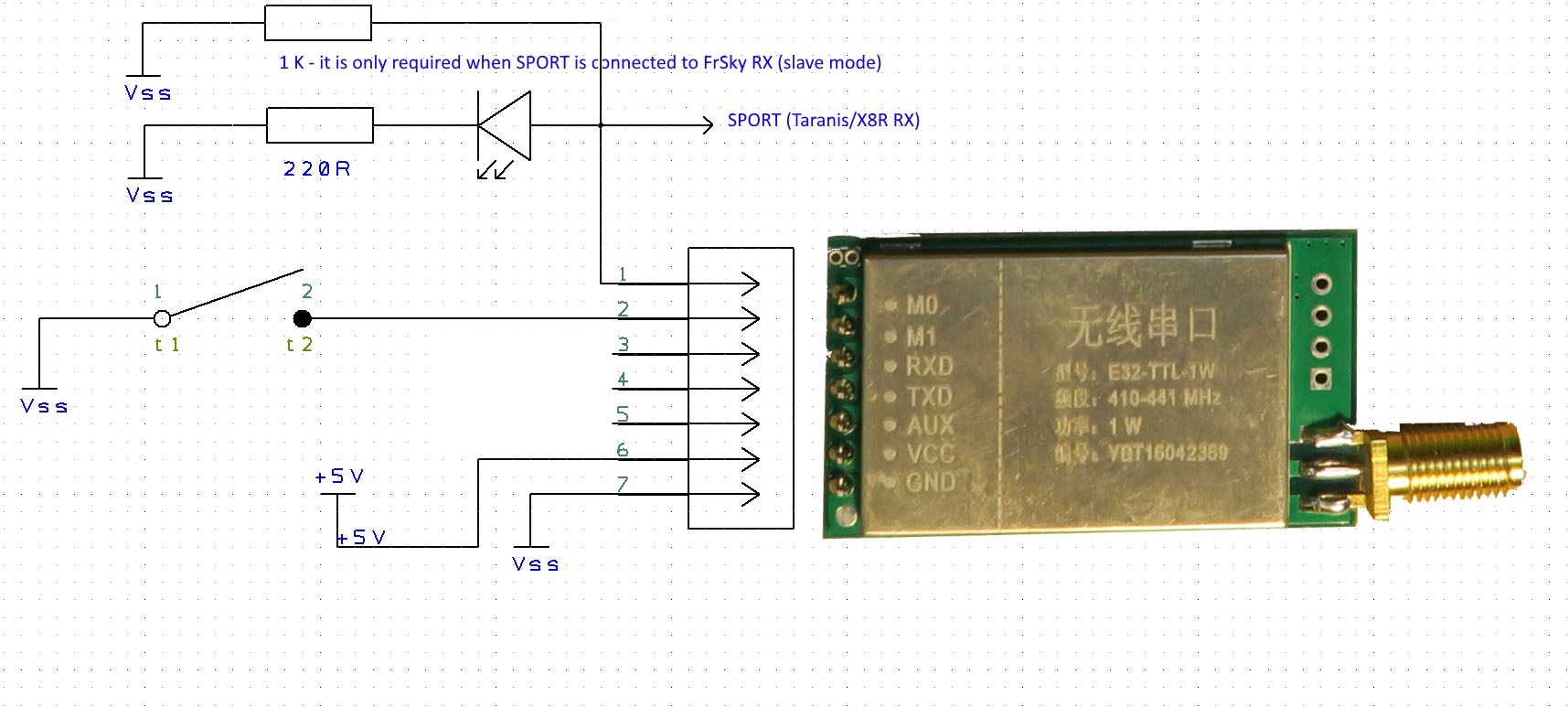
М0 с лоры подключаем к спорт на джампере.
Резистор 1кОм нужен?
Спасибо! Сейчас буду делать
Вот сейчас шью модули лоры. Поправьте, пожалуйста, если я не прав.
На ретрансляторе (передатчик) T433A_P_SBUS_T_SPORT_V1.92.s19
На приемнике в самолете R433A_T_MAVLINK_P_CPPM_P_SBUS_V1.92.s19
В qczek конфигураторе поменял на передатчике: Pairing Code 11111, протокол SBUS input, No CPPM CH - 16;
на приемнике: Pairing Code 11111, протокол SBUS, No CPPM CH - 16;
Управление с задержкой 0,3 сек получил;
И заметил еще в прошлый раз, что сервы судорожно отрабатывают движения. Не плавно, а рывками. Это норма?
Как подключить телеметрию (как её настроить в конфигураторе и Inav)? в данный момент подключение всех проводов на фото. Прошу прощения за корявость, чукча не художник)
Я на планере по ФПВ не летаю, а свои трёхметровики гоняю по старинке - на глазок и шестому чувству…
А я синие фломастеры больше люблю, чем зеленые.
подключи свой приёмник к автопилоту напрямую
при подключении R1 к Полетнику задержек нет. Летать даже можно, но не более 400 метров - пропадает связь из-за 1,2ГГц видео. Помехи из-за кратности частоты.
А смотреть задержку, если подключать лору к разъему внешнего модуля на аппе идея так себе, т.к. аппа начинает крутить-вертеть. Но задержка явно на стороне лоры. Но для большого инертного мотопланера это не так критично
меня подключение по смартпорту и/или передача телеметрии на пульт никогда не интересовало
Из телеметрии требуется только параметр Vspd для звукового вариометра. Для планера очень нужная вещь.
Спасибо! Вечером попробую. А как подключить в ретрансляторе приемник Jumper R1 к передатчику лоры? Данная схема с оф сайта актуальна?
Вроде все аспекты записал
Благодарю, однако все данные пункты я соблюдал и выполнял. Инвертор сделал на маленькой печатной платке смдшными компонентами. Повторюсь, управление (без теле) на 1.92 я получил. На 2.0 не добился ничего. Темным лесом для меня стала настройка Inav’а для получения rssi и телеметрии, настройка модулей лоры в конфигураторе пшека и их соединение. Дополнительным бонусом хотел получить телеметрию с блюпупа, но пока с основными настройками не разобрался до блюпупа далеко.
Забыл сказать, что полгода только как познакомился с современным полетным оборудованием. До этого 8 лет летал на хоббикинговском hk-t6a. Поэтому отстал в развитии лет эдак так на шестьсот. Прошу простить мое невеждество 😃
Но все это описано.
А можно либо ссылками, либо по пунктам для тех кто в танке (меня)? Потому что много разных инструкций перепробовал, все мимо. Уже и запутался где правильно делал, а где нет. Спасибо)
Опять же, прошу заметить, делаю не модуль лоры, а ретранслятор. Модуль делается легко. С ретранслятором начинается танец с бубном. Еще раз повторюсь, не хочется сжечь что-либо из электроники.
Собираешь по схеме как на офф.сайте и радуешься жизни. Никаких доработок не нужно.
Да, действительно, дельный совет. Даже тему можно закрыть, т.к. все что написано на офф.сайте отлично работает у всех. Да и в пшекском языке все понятно. 😠
У меня вся ета связка работает
Буду премного благодарен, если поделитесь наработками 😒
Что за 4-х пиновые модули?
На оф. сайте написано, хоть я и в английском туповат: “Old one using 2 pins programming port. And new one using 4 pins.” Ссылка
Доброго дня! Прошу сильно шапками не бить, но шерстил форум а ответа так и не нашел (наверное, плохо искал).
Пытаюсь подружить QCZEK 433МГц с аппой Jumper T16. По личным наблюдениям и чтению форума понял, что надо делать ретранслятор. Несколько раз пробовал, сделал инвертор, получилось чудом получить управление с задержкой около 0,3 секунд. Телеметрию так и не осилил. Боюсь сжечь. Модули лоры “новые” (4 пиновые), приемник Jumper R1 с SPort’ом на FrSky’евском протоколе, полётник Matek 722-Wing с Inav’ом на борту. Пробовал прошивку qczek 2.0, но там ногу сломал. Поэтому прошу помощи, если кто сталкивался. Либо здесь в этой теме (но не хочу флудить), либо в личном порядке. Спасибо! Доброго неба!