Activity
Элероны - 2 * DS65K
Руль высоты - 1 * DS65K
Руль направления, не вспомню, но посмотрю. Там что-то очень мелкое, цифровое, менее 5 грамм весом. Я помню, стал искать такую серву - не мог толком найти её в зарубежных магазинах.
Видимо у вас по одной метле с которой вы пылинки сдуваете
Нет, не одна…

вы пылинки сдуваете
Не сдуваю… Просто беру, швыряю в небо и летаю в удовольствие. Иногда даже колочу…
что то я ни кого из вас на соревнованиях не видел…
Бываю…
Но видно не пересеклись…
и нитками жгутики проводов вяжите.
Вяжу. И вам настоятельно рекомендую того же.

Вам бы посмотреть как собраны боевые мётлы спортсменов
Лучше вы посмотрите - как спортсмен Андрей Ерохин собрал нутро фюза Snipe (металку я у него приобрёл как Б/У)
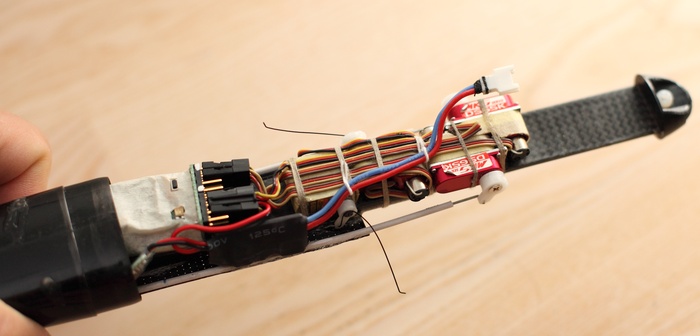
Более аккуратной сборки - я в жизни не видел.
Я только полазил немного и заменил разъём питания и пищалку.
Не обижайтесь, просто есть люди, которым нравится руками делать аккуратно. И летать нравится. И не играет роли: завтра соревнования или через пол года. Это от человека зависит.
Раньше, был режим тестирования GPS (и других компонентов) в терминале ардупилота. Терминал последних версий ардупилота накрылся медным тазом из-за нехватки программной памяти микроконтроллера (как я понял). Как теперь тестировать GPS и магнитный компас ? Типа всё сносить и ставить старьё ?
Полную калибровку делаю всегда при первоначальной настройке платы пилота. Прошивку не могу вспомнить. С работы приеду - буду смотреть.
На базе APM Ardupilot собрал два летающих крыла. Всё вроде нормально, но есть одна общая для двух разных автопилотов странность: приехал на поле, сразу запускай Mission Planner и жми калибровку горизонтального положения. Иначе будет лететь с заметным креном и тангажом. Это изрядно трепет нервы, т.к. крыло норовит войти в землю. Спасает только вовремя заключённый режим ручного управления.
Но ! Если сделать калибровку горизонта и обесточить, а потом лететь - то всё нормально. Я уже моск сломал в поисках причин… Мне сказали, что это мол нормально, это какой-то тепловой дрейф и всё такое прочее, мол так и должно быть. Но что-то мне подсказывает, что это не совсем так. Все так мучаются перед вылетом ?
Платы разные. Одна APM 2.5.2 с Rctimer, а другая HK Mini с Хоббей. Как такое может быть ? На следующий день - горизонт с нуля надо калибровать. Собрал коптер на APM 2.5.2 с Rctimer, там нет такой пакости. APM как будто забывает точное положение горизонта. Кто-нибудь знает ответ на эту самолётную загадку ? Повторюсь, проблема именно на самолётной прошивке. Лётная конфигурация в обоих случаях - летающее крыло. Это общее что объединяет проблемные случаи.
Заранее спасибо.
На коптер и самолет разные прошивки. Так и прошивалось?
Прошу прощения. Я ошибся темой !
Это ведь тема для PIXHAWK PX4. А у меня простой APM 2.5.2
На базе APM Ardupilot собрал два летающих крыла. Всё вроде нормально, но есть одна общая для плат странность: приехал на поле, сразу запускай Mission planner и жми калибровку горизонтального положения. Иначе будет лететь с заметным креном и тангажом. Это изрядно трепет нервы, т.к. крыло норовит войти в землю. Спасает только вовремя заключённый режим ручного управления.
Но ! Если сделать калибровку горизонта и обесточить, а потом лететь - то всё нормально. Я уже моск сломал…
Платы разные. Одна APM 2.5.2 с rctimer, а другая HK mini с Хоббей. Как такое может быть ? На следующий день - горизонт с нуля надо калибровать. Собрал коптер на APM. Там нет такой пакости. APM как будто забывает точное положение горизонта. Кто-нибудь знает ответ на эту самолётную загадку ?
Заранее спасибо.
[2 MAX-65]
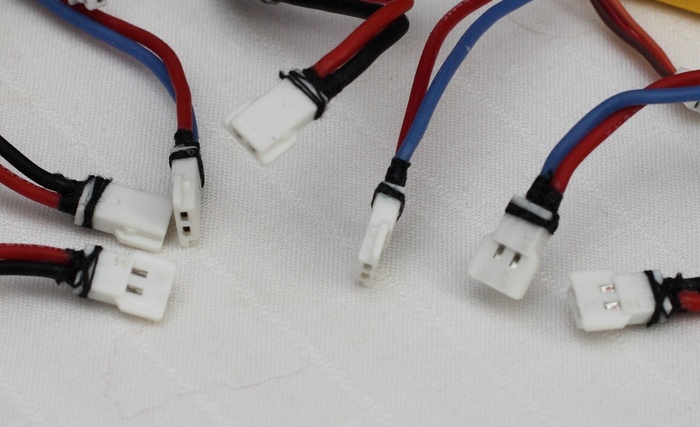
Есть такая проблема. Зовётся в простонародии: “кисточки” (когда от провода волоски торчат в месте пайки).
Вы учтите что у любого производителя стабилизатора или пищалки, как правило, имеются большие полигоны медных проводников (обычно это шина земли), которые так или иначе близко расположены к другим клеммам. И кисточки могут дотягиваться в том числе и до этих полигонов.
Тут одно спасение - фиксация провода от шевеленки при помощи ниток или подручных приспособ. Производитель вам почти не поможет в борьбе с этой проблемой. Это моё мнение…
Я просто вижу, что в умело собранных металках - все провода питания ограничены в своём перемещении, чтобы кисточки не образовывались при многочисленных перегибах точек паек.
Чуть более продвинутая повышайка до 1,5А на TPS61030. Есть синхронное выпрямление, токовая защита…
В течении трёх выездов на полёты тестировал этот повышающий модуль при питании от 1S LiPo.
Мой сетап:
3 сервомашинки MKS 65
1 сервомашинка Dymond D47
1 пищалка 1S (от V_Alex)
1 приёмник Futaba R6008HS
Тест прошел удачно.
Мне пришлось втыкать повышающий модуль из-за MKS 65. У меня, вроде всё работало и от 1S, но временами, при заходе на посадку и торможении, один из элеронов вдруг замирал и ждал когда я питание передёрну. В паспорте MKS 65 ни слова про питание от 1S, так что пришлось согласиться с фактами, так как угробить метлу очень не хотелось. Искал повышающий модуль на микросхеме с предсказуемым качеством. Вот… нашел…
[2V_Alex]
По поводу повышающих преобразователей для планеров…
Я немного прочитал начало PDF-ника на NCP1450 и там пишут странную для меня информацию…
The device will automatically skip switching cycles under light load condition to maintain high efficiency at light loads
Можете это прокомментировать ? Планер будет издавать писки и посторонние звуки на слабых нагрузках по питанию ?
почемуто даташита не нашел вообще.
Я тоже не смог понять: кто такой NCP1405 ? Если идёт речь о предсказуемой надёжности, то стоит говорить о применении продукции известных производителей. Тут - явно какой-то хит, но чей… ? Пока я не разобрался. Надеюсь, что сам автор прояснит ситуацию.
Я сделал видео-обзор 2S пищалки от V_Alex.
Предлагаю вам самим на всё посмотреть. У меня остались только хорошие впечатления от качества, работы и размеров.
7,3V - начало мигания зелёного светодиода;
6,9V - начинает пищать и загорается красный светодиод;
6,5V - писки удваиваются по частоте, красный начинает моргать;
Рядом, специально положил вариант пищалки от hobbyking для оценки относительных размеров.
Решил попробовать сделать пару модулей питания на базе NCP3170
Хорошее решение. Хочется узнать:
- “паразитный” ток без нагрузки на выходе;
- масса обоих вариантов;
- фото, где рядом для сравнения размеров лежит “народный” китайский понижайка на MP2307;
И что теперь, “обратно в пещерный век”?
Не… туда не хочется. Хочется купить б/у Futaba 8FG за микро-денюжку и пользовать. А в метлу - пищак…
[2 buerger]
Видимо есть ситуации, когда исторический процесс из раза в раз повторяется в разных формах. Ещё до вас жила дама во франции, которая решила затролить народ фразой: “Если у них нет хлеба, пусть едят пирожные!”.
Примечательно, что было с ней дальше…
И так… вот, смотрим как мониторит 2S LiPo monitor from HobbyKing
На видео видно - сколько борт потребляет вообще, в холостую. На борту 4-е сервы (3 Гиперион DS09SCD + 1 Dymond D47); Приёмник на 4-е канала TFR4; понижающий стабилизатор на MP2307. Итого - почти 90ма на холостом ходу.
3,43V на банку и он начинает орать.
Я бы ставил 3,5V и успокоился на том. Для F3K это актуально.
По части телеметрий и прочего, самый внятный совет я получил от chitaf3a и пользуюсь этим. Просто не надо дурковать и доводить АКБ до критического состояния, можно просто заранее, по полётному общему таймеру принять решение о замене АКБ на другую. Благо, на F3K ты садишься часто, и сделать это не так и трудно. Пищак - это для перестраховки на случай: “сунул в борт по запарке АКБ не глядя…”.
[2 V_Alex]
Понял вас по пороговым напряжениям.
Давайте поступим так. Как бы там ни было, я знаю что многие пилоты F3K ставят и успешно используют китайский 2S-монитор питания для отслеживания питания борта (и я в том числе). Не смотря на все недостатки этих мониторов, они опробованы и сильно выручают в поле. И судя по их звуковому оповещению (изменение частоты попискиваний при дальнейшем снижении питания), настроены они по порогам весьма удачно. Что я имею ввиду. Я заметил, что у некоторых пилотов происходит следующее: летаем, запищало в полёте, посадка, несём планер до машины… и даже пока несём слышно что частота писков возрастает. Это говорит о том, что пищалка сработала очень вовремя и далее идёт лавинообразное падение напряжения прямо вот… на глазах можно сказать…
Я сегодня попробую записать видео, с лабораторным блоком питания и пищалкой из китая. Имеет смысл просто повторить эти пороговые значения. К ним есть доверие, и появилось оно в полях, в процессе полётов.
Плата + залитый контроллер = самое то…
По части моего проекта. Да, я его делаю. Сейчас я прошел примерно 25% от всего пути. Впереди:
- дописать код;
- вылизать его на тестах;
- раза три перечертить печатную плату уменьшив её габариты;
- что-то придумать с пищалкой (найти как можно мельче);
Это всё время, время…
Время, отнятое от полётов. Выглядит действительно странно: заместо полётов и сборки мётел - я сижу и раскуриваю мануал на проц в 460 страниц.
При первом удобном случае - я брошу это, и буду больше времени проводить в полях. Просто, как я уже и писал - попал в тупик с этими пищалками и решил кардинально упороться на них. Но тут вы нарисовали свой пищак на форуме… Так это просто шикарно ! Я просто сконвертирую деньги в свободное время.
Программатора для 10-ой серии атмела, у меня один фиг нету. И тратиться на него мне лень. Проще всё взять у вас.
Остаётся только попросить вас выложить видео-запись работы вашего монитора питания, чтобы понять что там и как происходит при снижении питания (например китайский монитор начинает увеличивать частоту писков при дальнейшем снижении питания).
А пересылка… ну так, это решается думаю… Таких как я, кто будет паять детали размера 0603… найдётся не так и много. Не думаю, что у вас будет завал желающих. А чтобы вас на почту лишнего не гонять - можно сразу партиями по 5 шт отсылать.
И ещё, если проц и плата есть, то какая модель у вашей пищалки ? Может она там золотом намотана внутри… Мож тогда ну ёе нафиг…? Что заказывать придётся на её место ?
[2 SAN]
Благодарю. По вашей ссылке, действительно можно найти 2S пищалку. Но это не то пальто. Разница есть, и весьма заметна (мне важна, и мне заметна).
[2 V_Alex]
Вот уж не ожидал. Я считал, что все кто в Москве не будут задумываться над предложениями финансовой направленности.
Могу вас только просить сделать проект вида Open Source.
[2 V_Alex]
Очень компактное приятное решение.
Как ваше решение приобрести или повторить ?
Опытным путём, выяснил что действительно, на 2S-мониторах питания с HobbyKing имеется встроенный звуковой генератор на самой пищалке. Нафига они его там применили, имея на руках микроконтролеер ?! Не ясно. Можно было и не применять, а делать меандр в один килогерц прям на контроллере. Ясно то, что пищалки без встроенного генератора там не работают. Так же ясно что настала пора делать свой монитор питания на микро-пищалке без встроенного генератора. Чтобы был компактнее.
Есть уже первый набросок на микроконтроллере STM8S003F3
Внимание.
Мелкая пищалка из поста #243 оказалась не в состоянии пищать.
Не имею понятия - почему. Полярность менял - пофиг.
(случайно затёр изображение в посте #238, восстанавливаю весь пост, ибо тут по другому - ничего не исправить никогда)
Если кто-то задумал сделать джампер выключения борта в перерывах между полётами, если у вас понижающий преобразователь собран на MP2307, то вас наверное это заинтересует. Надо припаять всего два провода, и при их замыкании - борт будет выключаться. При этом, будет оставаться очень небольшой паразитный ток (менее 1ma), но это не большая проблема.

Если коротко - то вывод номер 7 надо замыкать на землю.
-------------------------------------------------------------------------------------
Кто интересуется мелкими пищалками, то можно выиграть в размерах и весе применяя вот это.

Это зовётся HC0905A. Поиск вам в помощь.
Весит на 1грамм меньше, чем стандартная пищалка купленная на Кинге.
Как орёт - не знаю. Если честно, то и Кинговская пищалка в полёте слышна только если рядом пролетаешь.
Цена стабилизатора: 0.6$ за штуку.
Цена микросхемы: 0.19$ за штуку
Т.е. примерно 46 руб против… хех… лучше не писать даже.
Купите с десяток стабилизаторов и защита от переполюсовки не требуется 😃
А если серьёзно, то у этого чипа есть метализированная “пятка”, до котрой вы паяльником не дотянитесь при перепайке. Нужна ИК-печка или фен, чтобы вести монтаж/демонтаж.
Довольно геморно при такой низкой цене изделия.
Для себя я решил заказать-таки микросхемы, т.к. скопилось уже три битых стабилизатора.
Из десятка стабилизаторов мне приехал один битый. При подключении к лабораторному блоку питания - сразу сработала защита, заблаговременно выставленная мной на 60ma. Короче, стабилизаторы весёлые… Рекомендую их тестировать перед установкой: на выход надо закинуть 4-е резистора соединённых последовательно по 1ом (2 Ватта мощность каждого резистора). Они будут греться. Ток будет 1.25ампера. В таком режиме стабилизатор обязан работать хоть сколько долго и не выходить из строя.
Если кто-то задумал сделать джампер выключения борта в перерывах между полётами, если у вас понижающий преобразователь собран на MP2307, то вас наверное это заинтересует. Надо припаять всего два провода, и при их замыкании - борт будет выключаться. При этом, будет оставаться очень небольшой паразитный ток (менее 1ma), но это не большая проблема.

Если коротко - то вывод номер 7 надо замыкать на землю.
Наверное многие используют понижающие импульсные регуляторы из китая…
Я решил немного поделиться своим опытом модификации этих регуляторов в плане повышения отказоустойчивости. Дело в том, что на наиболее компактной версии регулятора, собранного на контроллере MP2307 - применяют планарный подстроечный резистор. Именно с ним, у меня лично были трудности (была зима, минус 18, летали на слоперах). Регулятор вдруг стал выдавать не 5V как было ему выставлено дома, а нечто иное (благо, был внятный вольтметр с собой). При этом регулятор был затянут в термо-усадку. Но не суть. Как ни верти - этот резистор конструктивно выглядит очень хлипким и любое ухудшение контакта в области ползунка черевато тем, что модель будет загублена. Я их стал перепаивать на постоянный резисторы. После перепаек, я ни разу не столкнулся с каким-либо цирком на полётах, связанным с питанием. Идея проста: запять заместо подстроечника - постоянник. Но есть небольшие проблемы.
- как аккуратно удалить переменник и не посрывать тонкие дорожки на плате ?
- какой номинал ставить на место переменника ?
- что делать, если нет типового номинала ?
Я задался целью сделать фиксированное выходное напряжение в районе 5.2V Мне это показалось самым практичным и безопасным. И приёмник не сгорит, и все сервы - тоже, и питание серв чуть выше (им приятнее чутка в плане скорости).
На плате регулятора MP2307 стоит резистивный делитель. Одна часть делителя это наш несчастный подстроечный резистор, который мы заменим. Другая часть - постоянный резистор на 8.2 килоома. Дальше, наверное стоит посмотреть видео, ближе к концу видео - будет макро-фото модифицируемого регулятора. Там всё всё довольно чётко видно что и где стоит и что там написано.
Я покупал разные партии этих регуляторов, и везде стоят в делителе постоянный резистор на 8.2Ком. Я за место подстроечника впаиваю два параллельно соединённых резистора 47Ком и 200Ком. Потому как найти нужный типовой номинал мне не удалось. Учтите, что обычные резисторы, имеют точность 5%, и выходное напряжение будет устанавливаться с точностью 5% Если есть желание, то можно сразу купить резисторы с сточностью 1%, но это мне кажется излишним. 5% - там за глаза. Я просто это написал, чтобы вы не удивлялись: почему на выходе у вас получилось не 5.2V, а например 5.16V Стоит отметить, что штатные резисторы там стоят тоже 5% точности.
И так… смотрим видео, задаём вопросы (если нужно…)
Пригодится…
Привожу вспомогательное видео, чтобы больше посмотреть про приспособу из автомобильного прикуривателя.
Скажу больше, навреняка есть более простые способы удаления подстроечника, но мне мой способ нравится больше всего. Получается чисто и аккуратно.
Пока сервы не заклинит - будем летать…
[kompmen]
Получил два ваших крылышка. Всё очень приятно. Спасибо !
Жду третье и заказал 4-ое…
Режу колодцы под сервы, а в это время, выходной и дует правильный ветер. Жесть… щас с ума сойду. И торопиться нельзя и …
[2 MVP]
Доброго дня.
Хотел выманить у вас ссылку на фото-архив тех фотографий, что делала ваша уважаемая дочь. Можно организовать ? Не хотелось бы думать, что она с фотоаппаратом там зря тратила своё время. Я у неё на поле поспрашивал, она мне повествовала о том, что вы будете этим заниматься и сможете обеспечить доступ к фотографиям через интернет. Я понимаю, много наверное работы и много ещё чего. Надеяться стоит, или нет ? Или я пропустил ссылку из-за не внимательности ?
Заранее спасибо.
Спасибо. Пошел читать про алгоритм обработки RSSI…
[2Rover]
Простите за немного общий вопрос…
Я работал с СС1100, там регистры - один в один с СС2500. Но я так и не понял - как узнать уровень принимаемого сигнала. Там имеется регистр RSSI. Я его читаю, вывожу через СОМ-порт на экран… Ну… и там, как мне показалось, очень много сильных флуктуаций (при неизменной частоте трансивера).
Вопрос такой: вы выводите на дисплей уровень принимаемого сигнала в условных единицах. А как вы его считываете ? Там три регистра настройки частоты. Передвинули частоту (инкрементировали FREQ0…FREQ2), запустили перекалибровку… А дальше что ? Перешли в RX и надо считать RSSI ?
Я почему пытаюсь это узнать… У меня была задача -ри помощи этого регистра RSSI настроить пару трансиверов как можно точнее путём программной подстройки частоты одного из трансиверов (типа кварцы одинаковые, да вот не не одинаковые…). Ну я и написал софт для чтения этого RSSI. Я когда удалял-подносил модули друг к другу (были настроены на минимум мощности), я не смог понять по какому закону менялся этот RSSI. Хотя модуль успешно принимал 7-и байтный пакет данных. И как-то я подумал, что или эфир сильно загашен на 433, либо у меня лыжи не едут. В итоге, я настроил всё, но только путём выяснения того, как и на какой граничной частоте, связь вообще пропадает. И с тех пор я немного в недоумении.
Буду очень рад, если кто-то меня в это сфере разтормозит…
Заранее спасибо.
Может кто подскажет, в отношении тяг на хвост…
Есть вот такой материал 0.71mm ID Etched PTFE (22 AWG Bondable Teflon) Pushrod Outer Tube
Написано, что трубка протравлена для хорошей клейкости снаружи. Но я не могу понять - что пихать внутрь чтобы делать боуден. Туда проволку ОВС пихать ? Какой диаметр лучше ? 0,6мм ?
Просто, боуден хороший не купить так просто, а на планерке увидел уже готовое решение. Другие товарищи у меня начали вопрошать - а как бы нам тоже самое, но не на планерках применять ? Я понимаю, что комплект тяг у Виктора можно купить, но иногда, удобнее покупать в других магазинах, попутно закладывая в свою посылку что-то дополнительное.
Подскажите…
Опытные… подскажите пожалуйста:
Допустим я купил планерок VF и хочу питать борт от 2S Li-Po плюс импульсная понижайка (StepDown) на 5V…
Какая 2S Li-Po лучше всего сгодится под этот планерок ?
Имеется ввиду не то чтобы вот, попасть в тютельку по центровке (этого я и не прошу). Я прошу подсказать: что заранее можно купить, чтобы оно органично встало в носовую часть, и при минимальном свинце в носу жило…
Ну, ведь наверняка есть какое-то среднее, что многим подходит…
Всем спасибо за ответы и фото.
Мои “школьные парты” все летают на T-крюках. И анатомических, и симметричных… Даже и не думал, что на банан-пластинах можно кидать/летать.
[2 ЕНОТ]
А вы сами что для себя решили при сборке: крюк или пластина ?
Именно для этой модельки…
Меня волнует то, что с пластиной, я видел как человек мучился: ему почему-то до крови растирало руку в межпальцевом промежутке (если вообще такой термин имеется…)
[2ViktorF]
Виктор, я просмотрел последние 4-е странички этой темы. Один раз заметил что на месте крючка для заброса зиждется некая пластинка. Я правильно понимаю: крючка нет и на его месте вы ставите пластинки (в комплекте сборки планера идёт пластинка).Изучать тему можно, но не вижу смысла, т.к. вы могли уже что-то поменять. поэтому и спрашиваю ( может быть даже на первый взгляд и очевидное). Т.е. я так понял, если у вас купить собранное крылышко, то там я буду видеть пластинку, а не крючок. Так ?
В том то и дело что автопилот не хочет микшировать ничего сам. Этим вроде как и объясняется наличие активных микшеров в аппаратуре управления. Я тоже так сделал как француз, и у меня MANUAL на ЛК заработал. Но как только выходишь в авто-режимы то автопилот резко тупеет и не понимает, о каких таких элевонах идёт речь, и ессно рулит он как обычно - руль высоты отдельно, крен - отдельно, никакого микширования. Все попытки активировать микширование внутри автопилота - провалились. Это если говорить про ArduPilotNG, а если говорить про ArduPilot, то если бы не New style elevon mixin, то я бы вообще на ЛК ничего настроить не смог. Вот и задумлся - а может кто-то сможет втолковать тогда что же такое Old style elevon mixing ?
Попытка перевести - мне ясности не прибавила.
Помогите пожалуйста снять “тормоза” ?
Когда-то Ardupilot портировали на плату Crius v1 и получили проект ArduPlaneNG. Всё тоже самое, только старое всё, ну и плата другая (если грубо…)
Смотрю блог одного из французов. Он летает на летающем крыле Maxi Swift и описывает что и как надо настраивать.
Всё бы ничего, но тут я замечаю, что на его аппаратуре с прошивкой ER9x настроены микшеры элевонов для летающего крыла.

Ну думаю, француз просто пользует плату как стабилизатор и всё. Потом до меня доходит что он летает по точкам в автономном полёте. И тут приходит мысль: а где же микшер элевонов, если например он выключит аппаратуру и тем самым перейдёт в Fail Fafe (RTH) ? Да и вообще, как автопилот будет рулить, если у него самого нет понятия как и что микшировать.
Моя мысль такова: летать будет, но только в MANUAL. Во всяких там AUTO - лететь вообще не должно. Но тогда это сильно расходится с тем что публикует француз.
Пока только вычитал что был когда-то старый режим: Old style elevon mixing EEPROM setup (ELEVON_MIXING option). Как раз его я так и не смог у себя настроить на ЛК. Я смог настроить только: New style elevon mixing EEPROM setup (ELEVON_OUTPUT option).
В каком случае нужно для ЛК прописывать микшеры элевонов в аппаратуру ? Это как-то касается “старого” режима настройки элевонов ?
Кто-нить хоть раз включал полётный режим “Cruise” ? У всех летит как по струне, или как-то иначе ?
Кто-нибудь плотно пользовал режим Cruise ? Сказано, что обязан держать курс и высоту (автогоризонт - само собой).
Настроил летающее крыло. Летает по точкам, ходит домой, нарезат круголя в Loiter-е. Но что то Cruise чудит немелко…
Я уже компас на плате убрал, вынес его подальше от силовухи…

Но что-то вообще фигня получается.
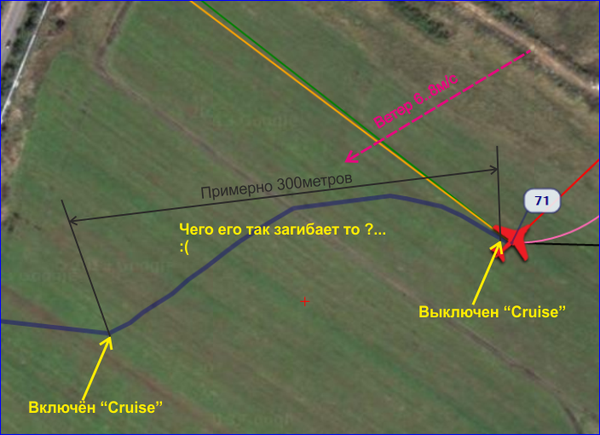
Картинку получил при анализе файла TelemetryLog. Видно что его корячит по курсу.
Компас калибровал прямо в поле. Калибруется вроде нормально, без причуд.
Заходил в консоль test -> compass : тоже всё штатно вроде.
Но при анализе TelemetryLog на какой-то там минуте выскакивает и почти сразу исчезает Bad Compass Health.
Вот это вообще номер… Кто-нить знает где лопатить ?
Заранее спасибо.