Самый дешевый клон T-Rex 450 - угадайте цену:)

да я думаю, что наоборот завысили. остальные в паралель стабилизаторы клеют, а у этого похоже всего один стоит, дай бог 1А даст.
однако оказалось, что я когда-то как плюшкин взял себе внешний UBEC на будущее, поэтому эту штуку за 10 уе не удержался и вписал в заказ. при такой цене оно еще и програмируется на предмет таймингов и софтстарта. всякие суперсимплы только тормоз умели включать, а тут аж удивительно ;)
За семнадцать-то долларов мотора жалко?
ну есть такое дело. сгорит - перемотаю, муторно, но возможно. но вот в последнее время мне не везет с заменой подшипников, боюсь и в этом случае косяк какой случится ;)
взял все три, на опыты пойдут если что 😉
Было бы очень интересно услышать о некоторых впечатлениях от использования этих моторчиков (ну и регулей тоже) - уж больно аппетитно за такие деньги! 😒
Думаю и не мне одному!!!
Для меня, к примеру, взять что-нибудь за такую цену - единственный способ полететь хоть как-нибудь, либо вообще никак (в виду финансовой ограниченности). 😦
Тот который 3700 вроде ок, проблем нет. Там есть еще на 4000, у него есть проблема - нет фиксации вала и сам корпус с магнитами вниз уезжает. Из бюджетных регов наверное смылс имеет 40A Centry брать, там BEC switched.
www.rcgroups.com/forums/showthread.php?t=962016
про эти моторы и регули, вобщем про самые дешевые цацки.
Было бы очень интересно услышать о некоторых впечатлениях от использования этих моторчиков (ну и регулей тоже)
в плане “летабельности” от меня вы ещё долго не услышите впечатлений, если полетит - и то хорошо 😉
а вот с циферками намного проще будет, если они вам помогут.
про эти моторы и регули
Спасибо за столь ценную темку для меня!!! 😃
Впечатления? - ну, для меня, для начала, если моторцик не сгорел и тянет более менее и его не надо напильником дорабатывать - то это уже гуд - а когда будет не устраивать - тогда уж и о чем-то получше и подороже подумаю (при наличии финансов). Я думаю такие для учебы (висении и блинчик) вполне пойдут 😉 А если они еще и параметрам заявленным соответствуют, то от них и большего ожидать можно.
Отзывы конечно есть и на www.hobbycity.com и в темке которую Вы подкинули, но всегда как-то чисто психологически больше доверяешь тем, кто поближе, на этом форуме, к примеру 😉
А циферки - это как? У Вас логер какой-нибудь?
Ну, если будут какие-нибудь графики или статискика какая - было бы очень интересно😋
А циферки - это как? У Вас логер какой-нибудь?
Ну, если будут какие-нибудь графики или статискика какая - было бы очень интересно😋
А какие графики и какую статистику вы хотели бы увидеть? У меня есть логгер и два мотора из списка: 3200kV и 4000kV. По этим двум моторам могу ответить почти на любые вопросы.
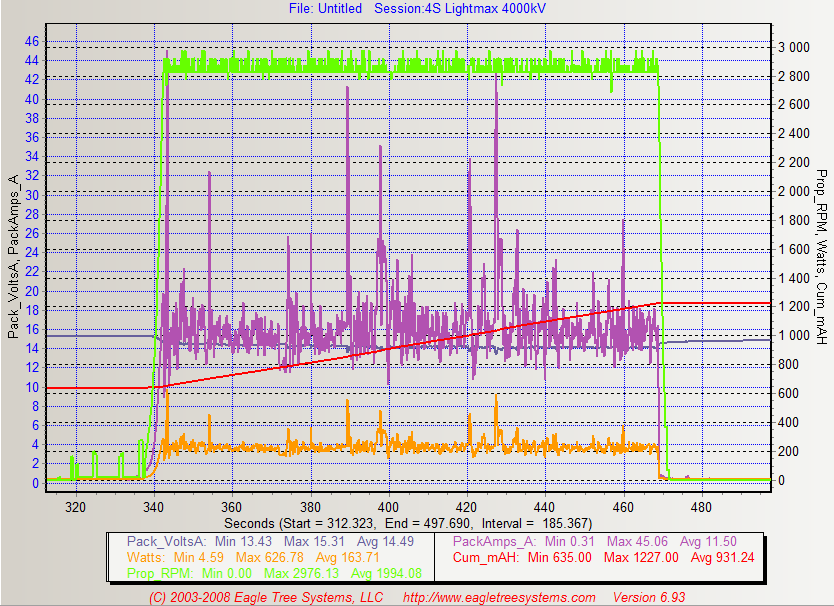
Вот, например, мотор 4000kV с пиньоном 10 и батареей 4S.
что касается сабжевого верта, то интересуют более приземленные параметры 😉
акк 3S, пиньон 11-13T. да и лопасти стеклопластиковые рекомендуют не более 2400 об/мин раскручивать.
p.s.
а датчик оборотов у вас который на 2 провода к мотору врезается, или бесконтактный?
А какие графики и какую статистику вы хотели бы увидеть? У меня есть логгер и два мотора из списка: 3200kV и 4000kV.
Какие? Да вот не знаю, новичек я, но наверно чего-нибудь бы уяснил из них! 😒
Но я уже изучаю последнии обновления Вашего дневника 😉 Много интересного!!! Спасибо!
UPD: пока писал уже и тут график появился:)
Меня тоже пожалуй интересует скорее 3S батарея (я думаю и с ней тоже можно эти моторчики или намного хуже?) да и лопасти попроще, для обычных полетов. Деревяшки, к примеру.
А вот моторы пожалуй интересны те, что Turnigy 3200kV, TP 3850kv, Turnigy 3700kv.
что касается сабжевого верта, то интересуют более приземленные параметры 😉
акк 3S, пиньон 11-13T. да и лопасти стеклопластиковые рекомендуют не более 2400 об/мин раскручивать.p.s.
а датчик оборотов у вас который на 2 провода к мотору врезается, или бесконтактный?
Ок, двигатель 4000kV, настройки при 3S.
Если вам надо 2400 об/мин, то поставьте 10T. Двигатель будет работать при оптимальных оборотах.
Для оборотов 2800-3000 надо ставить 11T, получится оптимальное соотношение момента и оборотов.
Угол опережения (timing) - 20-22 градуса.
Частота ШИМ (PWM frequency) - 10-12 кГц.
а датчик оборотов у вас который на 2 провода к мотору врезается, или бесконтактный?
У меня оба есть. 😃
Сейчас использую тот, который с двумя проводами. Мне обороты при авторотации не нужны. 😃
А еще было бы интересно знать какие фигуры приходятся на пики кривой PackAmps 😃
А еще было бы интересно знать какие фигуры приходятся на пики кривой PackAmps 😃
Я пока учусь… 😃
Так что там кувырки вперед-назад, немного скачков вверх-вниз, развороты на горке.
Остальное время я трачу на отработку висения боком и на мееедленные развороты в горизонтальной плоскости.
А вот моторы пожалуй интересны те, что Turnigy 3200kV, TP 3850kv, Turnigy 3700kv.
Могу сказать, что 3200kV с батареей 3S летает нормально при оборотах не выше 2600 в минуту и с пиньоном 11T. Если ставить больше зубьев, то не хватает момента. Я пробовал 13Т - это был кошмар.
Но настоящий драйв начинается с батареей 4S и оборотами 3000 в минуту. Если поставить 10Т, момент на валу такой, что вертолет просто уходит в точку при резком добавлении коллективного шага. Но нужны хорошие и “легкие” батареи, я пока предпочитаю Lightmax 4S 2200 mAh 20C.
Могу сказать, что 3200kV с батареей 3S летает нормально при оборотах не выше 2600 в минуту и с пиньоном 11T. Если ставить больше зубьев, то не хватает момента. Я пробовал 13Т - это был кошмар.
Но настоящий драйв начинается с батареей 4S и оборотами 3000 в минуту. Если поставить 10Т, момент на валу такой, что вертолет просто уходит в точку при резком добавлении коллективного шага. Но нужны хорошие и “легкие” батареи, я пока предпочитаю Lightmax 4S 2200 mAh 20C.
Вот это уже интересно!!! Спасибо!!
Мне бы подолшо что-то типа 3S 2200-2250, 2400-2600 rpm (для деревяшек) (правда на гувернер, даже в регуле, не думаю, что разживусь) и 11T.
А Вам хватало таких параметров с этим мотором для полетов типа “кувырки вперед-назад, немного скачков вверх-вниз, развороты на горке”, или Вы потому и перешли на 4S и 4000kv что было вяло. То есть, этот мотор в такой конфигурации нормальный для висения, блинчика и простых 3D с инвертом или уже на этом чувствуется вялость?
Ну уж и заодно - это при вот этой батарей www.hobbycity.com/hobbycity/…/uh_viewItem.asp?idPr… он " просто уходит в точку при резком добавлении коллективного шага"? Очень аппетитно, если это так!!!
Вот это уже интересно!!! Спасибо!!
Мне бы подолшо что-то типа 3S 2200-2250, 2400-2600 rpm (для деревяшек) (правда на гувернер, даже в регуле, не думаю, что разживусь) и 11T.
А Вам хватало таких параметров с этим мотором для полетов типа “кувырки вперед-назад, немного скачков вверх-вниз, развороты на горке”, или Вы потому и перешли на 4S и 4000kv что было вяло. То есть, этот мотор в такой конфигурации нормальный для висения, блинчика и простых 3D с инвертом или уже на этом чувствуется вялость?
Все от оборотов зависит. Если летать по кривым, то там особой точности оборотов не получить, надо ориентироваться на средние значения в полетном режиме.
Кувырки особой мощности не требуют, можно вообще по-самолетному летать, петлями, без отрицательных шагов. Я пробовал кувырки на месте при 2600 об/мин, никаких проблем. Скачки вверх-вниз при таких оборотах будут немного вялыми. Развороты на горке прекрасно получатся и при 2200 об/мин.
Чем ниже обороты и спокойнее стиль полетов, тем больше полетное время. Я ставлю таймер на 10 мин, когда отрабатываю висение или плавные пролеты. А если пробовать что-то более агрессивное, то время полета сокращается. Сегодня словил отсечку на шестой минуте, пришлось практически авторотировать с приличной высоты. Все обошлось без последствий. 😃
Я перешел на 4S по нескольким причинам. Некоторые из них были ошибочны. Но в итоге я доволен, т.к. могу или спокойно летать по 10-12 минут, или зажигать неподеццки. 😃 Да и риск спалить регулятор меньше, чем выше напряжение, тем ниже токи при равной мощности.
Ну уж и заодно - это при вот этой батарей www.hobbycity.com/hobbycity/…/uh_viewItem.asp?idPr… он " просто уходит в точку при резком добавлении коллективного шага"? Очень аппетитно, если это так!!!
Да, они самые. Отличные батареи.
Но для перехода на 4S надо еще внешний импульсный BEC, дешевые контроллеры с линейным BEC будут сильно греться или вообще сгорят. А покупать Контроник со встроенным импульсным BEC очень дорого, хотя и круто. 😁
Понял, Максим! Спасибо за ценную информацию.
Пожалуй теперь подумаю и в сторону 4S как вариант, благо $22.95 за 4S очень даже неплохо!!!
С уважением, Иван.
правда на гувернер, даже в регуле, не думаю, что разживусь
У моделей с электрическим мотором гувернер бывает ТОЛЬКО в контроллере скорости. Это просто опция удержания заданных оборотов двигателя.
Другое дело - нитродвигатели. Там необходимо внешнее устройство, с датчиком оборотов, которое управляет заслонкой карбюратора.
Контроллер скорости с опцией гувернера стоит своих денег. Если поискать, то можно уложиться в 50 долларов.
У моделей с электрическим мотором гувернер бывает ТОЛЬКО в контроллере скорости. Это просто опция удержания заданных оборотов двигателя.
Другое дело - нитродвигатели. Там необходимо внешнее устройство, с датчиком оборотов, которое управляет заслонкой карбюратора.Контроллер скорости с опцией гувернера стоит своих денег. Если поискать, то можно уложиться в 50 долларов.
Да, про гувернер это я как-то так коряво написал, хотя вроде уже успел узнать что для электричек в регуль встраивается это счастье 😊
Да и ценности его я не отвергаю, просто для меня в финансовом плане есть вариант собрать вертолет из комплектующих класса подобного обсуждаемому мотору (все самое дешовое) и хоть как-то полетать до зимы, а уж к след. лету что-то поинтересние докупить, либо брать сразу нормальное, но тогда только на следующий сезон! 😦 Вот такая вот диллема!
Пока вот пытаюсь симулировать:)
У моделей с электрическим мотором гувернер бывает ТОЛЬКО в контроллере скорости.
Хочу вас поправить.
Фирма Aerospire LLC наряду с ее очень популярным MULTIGOV гувернером выпускает ее “электрическую” версию eMULTIGOV, которая предназначена специально для электровертолетов. Так что совсем не обязательно гувернер должен быть в спидконтроллере.
Вот ссылочка на его даташит:
www.aerospire.com/docs/manual_emultigov.pdf
такое навороченное устройство могло бы использовать импульсы от ESC к мотору. задать соотношение магниты/полюса для правильного подсчета и убрать внешний датчик, так, мне кажется, было бы надежнее и к тому же точнее.
кстати, если в полете датчик отвалится, такой гувернер не отправит верт в небеса, думая что отсутсвие импульсов от датчика есть сигнал о снижении оборотов?
такое навороченное устройство могло бы использовать импульсы от ESC к мотору. задать соотношение магниты/полюса для правильного подсчета и убрать внешний датчик, так, мне кажется, было бы надежнее и к тому же точнее.
- Это уже из области сенсорных регуляторов хода. Но они определяют обороты мотора также не из собственных подаваемых на мотор импульсов, а от индукции вращающихся магнитов в период паузы. Если не ошибаюсь.
Поскольку просто наличие импульсов с регулятора еще ничего не говорит о скорости вращения магнитов. В идеале они должны совпадать. А в реале будут проскакивать от нагрузки. Для этого придумали тайминг - угол “опережения зажигания”, чтобы
минимизировать проскакивание. Поэтому такой замер, как вы предлагаете, будет неточным.
кстати, если в полете датчик отвалится, такой гувернер не отправит верт в небеса, думая что отсутсвие импульсов от датчика есть сигнал о снижении оборотов?
Элементарно решается программно в микроконтроллере, чтобы работало в определенном диапазоне оборотов. В этом случае легко сделать, например, такую защиту, как например если мотор заклинило(или ротор после падения) сбрасывать газ до нуля. Ну, если это нужно, конечно…
Поскольку просто наличие импульсов с регулятора еще ничего не говорит о скорости вращения магнитов
вообще-то я предполагал, что регуль не просто тупо шлет пачки импульсов, а каждый следующий посылает только после поворота ротора на некоторый угол.
вообще-то я предполагал, что регуль не просто тупо шлет пачки импульсов, а каждый следующий посылает только после поворота ротора на некоторый угол.
В случае с sensorless просто тупо шлет, опираясь исключительно на тайминг. Если сенсорный контроллер, то замеряет силу поля в момент паузы и синхронизируется в соответствии с положением магнитов. Обычные хоббийные ESC для бесколлекторников делаются sensorles. Сенсорные применяются в промышленности.