ArduCopter Mega: порт на обычную Arduino (тестим)

Подскажите, где-то видел, но не могу найти, на какие ноги ардуины выведены светодиоды?
Подскажите, где-то видел, но не могу найти, на какие ноги ардуины выведены светодиоды?
# define A_LED_PIN 13
# define B_LED_PIN 31
# define C_LED_PIN 30
Прописано в config.h
есть небольшая инструкция по сборке : hobby.msdatabase.ru/project-u.../ardupilot-gps
Мега спасибо,я признаться обыскался информации по тому,как его настроить.Кстати в Москве он стоит всего 320р
Существует ли разводка платы наподобие Black Vortex для самостоятельной сборки?
Я сделал себе что-то похожее,только без ГПС на борту и под нестандартные датчики.Один из них кстати,стоит на плате по этой ссылке
www.ebay.com/itm/260963038970 Попытка переписать код для моих датчиков под Мегапирата у меня провалилась ввиду не особо шаристости в этой области.Для Вия получалось легко,а здесь даже не пойму чего ему и надо.Если кто нибудь подскажет “Как это сделать?”
а точнее что именно от датчика требует Мегапират и как правильно это поправить в библиотеке,то я доведу дело если не до конца.так до почти его завершения.Т,к по идее,в скором будущем должны придти из Китая фабричные платы а-ля олинван с 2560 мегой и экзотическим датчиком типа акселерометро-компаса.
была другая идейка … распилить ардукоптера или виая на 2 половинки … те на 328 мегу повесить датчики и заставить считать горизонт .
У меня есть код MARG на кватернионах. Выдает углы, кватернионы, сырье. Я хотел под Мультивии испытать, но через RXTX не знаю как передать (в плане буферов и синхронизации). А для SPI пины 9,10,11 заняты под моторы.
У меня есть код MARG на кватернионах. Выдает углы, кватернионы, сырье. Я хотел под Мультивии испытать, но через RXTX не знаю как передать (в плане буферов и синхронизации). А для SPI пины 9,10,11 заняты под моторы.
так моторы на вторую мегу вешать (2560) а мелкая только опрашивает датчики и вычисляет положение в пространстве …
те берем ардуину НАНО или МИНИ вещаем на неё по I2C датчики , а по SPI ссоедитняем с ардуиной МЕГА …
C Праздником Защитника Отечества вас, Господа! И путь все полеты будут мирными!
Попадалась ли кому-нибудь схема сонара dyp-me007v2? Не хочет работать.
Обновлена прошивка до последней версии АrduCopter. Поправлена ошибка в обработке сенсоров FFIMU. Так же вернул пропавший код инициализации LED секвенсора.
В AC 2.4 была ошибка с сохранением некоторых параметров в EEPROM, теперь она вроде как поправлена.
Господа ай нид хелп
проблемма с мавлинком
XBEE 900 XBP09 XBEE Pro900
1ый модуль XBP09-DPWIT-156 revC
2ой модуль XBP09-DPSIT-156 revC
один разъем обычный спаркфан другой юсб
обе иксбы конфигурил относительно ардукоптерной вики
поставил тестовый код но порт три не получаю, даже диод на плате подключенной к APM2 не моргает
пробовал ставить мычку на обычный адаптер(не помогло=( )
выставил SH SL по Dh DL не помогло
поделитесь кто имел опыты с иксбами своими приключениями с подключением и настройками и ссылками
заранее спасибо
Выпустил новую прошивку 2.4.1
Подскажите пожалуйста. Под какой магнитометр по умолчанию заточена прошивка? У меня 5883L и никак не могу разобраться… И как он должен быть ориентирован относительно квадрокоптера?
Судя по коду, прошивка может работать с 5883 и 5843. Тогда другой вопрос, в планере на карте показан коптер + хотя в настройках выбран везде X. И если смотреть по моторам, положение коптера на карте и на подоконнике совпадают, а их перед соответственно не совпадает на 45 градусов. Так должно быть?
Вроде разобрался. Плата с датчиками у меня RU-IMU-9+1 v1.0 от Gapey. В настройках выбрал FFIMU, повернул плату.
Судя по коду, прошивка может работать с 5883 и 5843. Тогда другой вопрос, в планере на карте показан коптер + хотя в настройках выбран везде X. И если смотреть по моторам, положение коптера на карте и на подоконнике совпадают, а их перед соответственно не совпадает на 45 градусов. Так должно быть?
Лично я никогда не обращал внимания как он на карте выглядит, т.к. еще ни разу не испытывал в поле с GPS 😃
RU-IMU-9+1
Никогда не тестировалась, так что вы будете первым 😃
Так должно быть?
У меня так.
Вобщем, после поворота платы и выбора FFIMU в настройках, стало все правильно. Перед в планере, красная линия, смотрит туда же, куда и коптер. И еще, на подоконнике, магнитометр сильно врет, наверно из за радиатора отопления. Проверено коптером и айфоном.
Вобщем, “полетал”… Покину я вас. Пойду в соседнюю ветку. У меня есть 2 квадрика на мультивие, значит будет и третий) Тем более мультивий почти научился GPS HOLD и GPS HOME. Может и по точкам научится летать. В любом случае, закачал прошивку, чуть покрутил пиды и коптер стал летать.
В любом случае, закачал прошивку, чуть покрутил пиды и коптер стал летать.
с пиратом так же, но почему то одним везет только с пиратом, другим только с multiwii, а мне теперь с обоими везет ^_^ после местной muliwii прошивке
Подскажите что нужно изменить, в прошивке, еще кроме как в APM_Config.h
поменять с
#define FRAME_ORIENTATION X_FRAME
на
#define FRAME_ORIENTATION PLUS_FRAME
чтобы перейти на конфигурацию “+” ?
Пришла рама DJI 450 Frame, а на нее black vortex ,без переделки возможно поставить только в “+”.
Пробовал прошивки MegaPirateNG_2.0.49_BV_GPS_OK и MegaPirateNG_2.4.1, на обеих идет сильный расколбас. Но если присмотреться к квадрику то он пытается лететь в конфигурации “Х”. Моторы подключены согласно 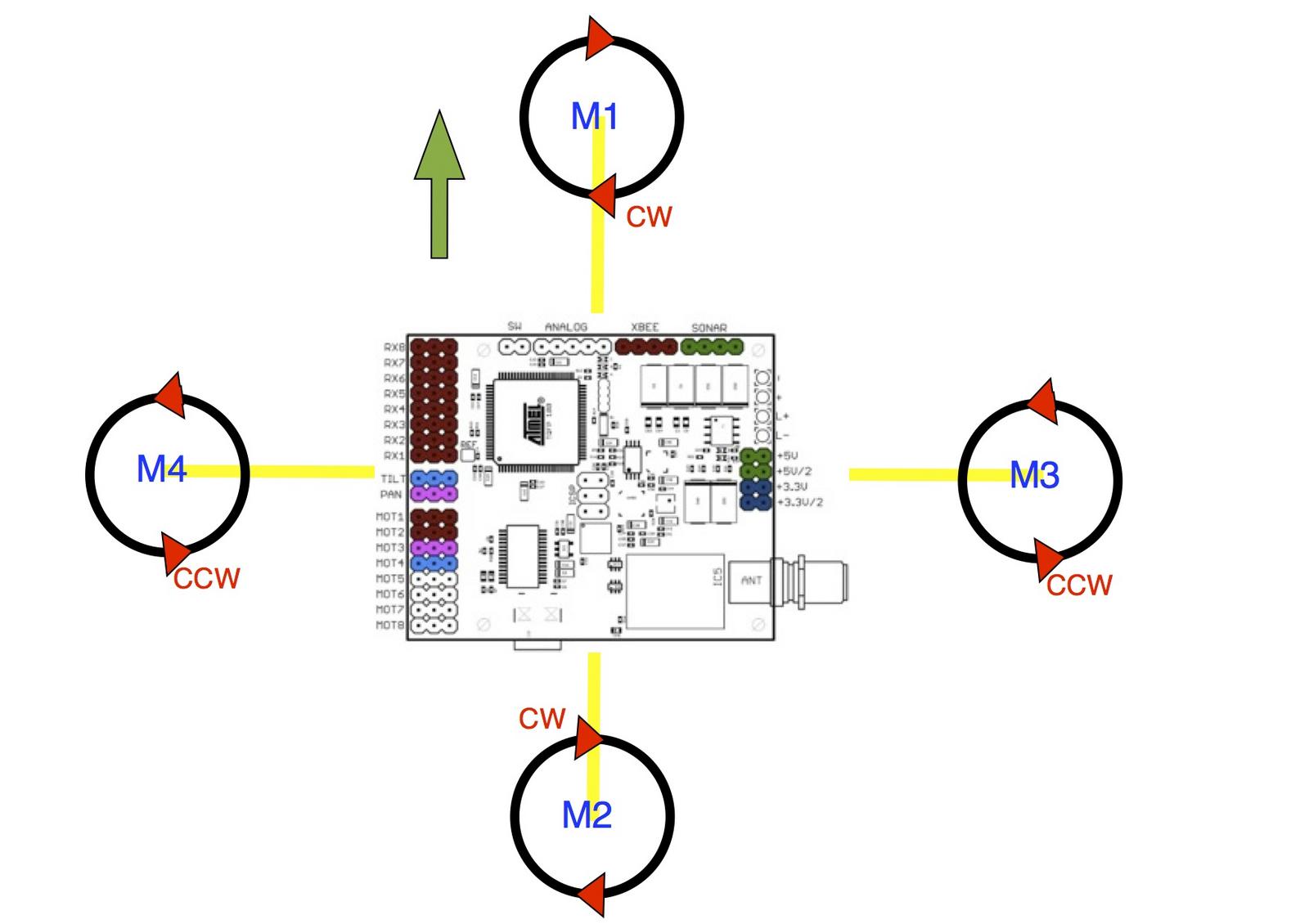
У меня бывало наоборот - выставлено X_FRAME, а судя по тяге, когда его держишь в руке, кажется что конфиг + 😃
По идее, достаточно FRAME_ORIENTATION определить, ну и в setup-frame проверить, если есть сомнения.
Уважаемый Sir Alex, подскажите пожалуйста!
Летаю на россыпе датчиков (BMA180, ITG3200……), короче тот же Allinone. До прошивки 2.3 менял адреса в библиотеке \libraries\AP_ADC \AP_ADC_ADS7844.cpp
на те, которые нужны мне, это BMA180_ADDRESS–>0x80 и ITG3200_ADDRESS–>0XD2.
А сейчас не могу найти где это можно сделать.
(два комплекта датчиков , купил в свое время когда был в Китае, а вот позже появился Allinone, и я пожадничал…)
Подскажите пожалуйста!
а в MegaPirateNG_2.4.1 ublox по i2c убрали? если раскомментировать GPS_PROTOCOL_UBLOX_I2C в APM_Config.h ошибочка вылазит.
так как в libraries\AP_GPS\AP_GPS.h закомментировали //#include “AP_GPS_Ublox_i2c.h”
и вообще GPS_Ublox_i2c_test.pde закинули в \libraries\AP_GPS\examples\GPS_Ublox_i2c_test\ а не
ткните носом где я торможу? у меня плата датчиков allinoneII ардуинка 1280
а в MegaPirateNG_2.4.1 ublox по i2c убрали? если раскомментировать GPS_PROTOCOL_UBLOX_I2C в APM_Config.h ошибочка вылазит. так как в libraries\AP_GPS\AP_GPS.h закомментировали //#include “AP_GPS_Ublox_i2c.h” и вообще GPS_Ublox_i2c_test.pde закинули в \libraries\AP_GPS\examples\GPS_Ublox_i2c_test\ а не ткните носом где я торможу? у меня плата датчиков allinoneII ардуинка 1280
Да, я убрал, т.к. у меня нет такого GPS и тестировать мне не на чем, а библиотека i2c изменилась. Подключайте его через Serial порт RX2,TX2.