ArduCopter Mega: порт на обычную Arduino (тестим)

А горизонт то настроен ?
Горизонт настроен. Да… калибровка регулей по отдельности результатов не дала.Та же ерунда
Почистите епром и заново все настройте
ну выяснить в регулях дело или в контроллере - поменяйте задний правый с любым другим на плате, и придерживая рукой стартуйте, если будет заводится тот с которым поменяли - значит плата, туда и копайте.
Вообщем, ребят, дело было в мозгах… в собственных 😃 регуляторы, плата все фунциклирует. Вот здесь решение проблемы rcopen.com/forum/f123/topic243069 .Подключая регулятор к мозгам, если даже не используем BEC (красный провод), обязательно сажаем черный, минусовой на землю. Такой проблемы не было на не перепрошитых регулях, т.к. ,мне кажется, из-за низкой частоты управляющего сигнала, а после перепрошивки пошла помеха и вылезла такая бяка. Засим все. Всем спасибо за помощь 😃
Вернулся с поля… Итоги неоднозначны. Приемник видит 9-10 спутников. Care-free отрабатывает корректно по всем направлениям. RTL работает, loiter вроде бы тоже. Непонятки возникли на этапе выполнения миссии. Во-первых, не разобрался, как запустить миссию с земли (действие takeoff добавил первым). Перевожу тумблер на режим auto, не происходит ничего. В врздухе auto включается (takeoff убрал), но тут возникали 2 ситуации: 1) Коптер летит в сторону первой точки, и на пол-пути поворачивает в сторону следующей; 2) Коптер летит в сторону первой точки, и опять же на полпути резко теряет высоту. Галки “держать высоту” и “проверить высоту” ставил и убирал.
Чего вот ему надо и как миссию с земли запустить? 😃
как миссию с земли запустить?
Включить авто и добавить газа
А в чем тогда смысл takeoff? Я полагал, коптер сам взлететь должен, без действий стиками 😃
Не знаю, но чтоб запустить миссию надо дать газа, а потом можно убрать
Ну я вобщем-то так и запускал, в стабе поднимал коптер и включал авто. На земле, как Вы описали, коптер почему-то сразу опрокидывался.
Нет, не в стабе. Включаете авто и даете и убираете газ
Да, в Wiki что-то такое написано, автоматический взлет специально заблокирован чтобы при случайном включении тумблера на земле коптер не взлетел.
На бок ложится при этом 😦 Но, правда, на поле трава кустами, может быть, за нее цеплялся. Пару раз попробовал с земли, потом в воздухе авто включал. В следующий раз надо найти полянку какую-нить 😃
В чем же может быть причина других проблем?
Коптер летит в сторону первой точки, и на пол-пути поворачивает в сторону следующей
Проверьте в настройках радиус точки, может он слишком велик - как только он входит в зону радиуса, считает точку выполненной. Насчет высоты, попробуйте задавать не относительную а абсолютную, вдруг поможет.
радиус точки
Это “Радиус WP”? У меня по умолчанию, 30 😃
А абсолютную высоту как указать?
Там в списке точек вроде флажок есть, так и называется Absolute Alt:

Раньше был, сейчас нету:
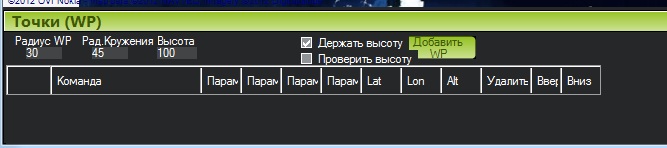
Раньше был, сейчас нету:
Он был, но игнорировался. “Держать высоту” на выполнение миссий не влияет, а “проверить высоту” корректирует относительные высоты по рельефу, который добывается из гугль ёрз, а там точность может быть не очень хорошая, и авторы предупреждают “используйте эти данные на свой риск”.
подскажите какие пиды для loiterа ставить? на стандартных в прошивке 2.6 не держит абсолютно. высоту кое-как, а вот положение вообще полный кошмар. в штиль уносит метров на 10
Вчера пробовал loiter в 2.7R3. Больше 3-х метров не сносило. Ветер был 3 м/с. Поднял P и I стало еще лучше. Потом правда дождь пошел, не успел нормально настроить.
Попробуйте увеличить P, затем немного I. Все настраивается путем проб и ошибок 😉 ну и по мануалу ардукоптеровскому.
Вчера пробовал loiter в 2.7R3. Больше 3-х метров не сносило. Ветер был 3 м/с. Поднял P и I стало еще лучше.
На прошивках до 2.7 летало не очень хорошо. Сейчас не сносит и при более сильном ветре.
Кстати, под родное ардукоптеровское железо уже появилась более свежая версия 2.7.3:
code.google.com/p/arducopter/downloads/detail?name…
Среди изменений исправленный баг с МПУ6050. Может из-за него многие жаловались на проблемы?
Подлетнул сегодня(ветер 2-3 м/с с порывами до 6):
пытался настроить аппу, в частности триммирование (как я понимаю оно смещает центральное положение стиков?), чтобы датчики не крутить…
примерно на 2:45 включил удержание высоты:
…походу надо поднимать P и I, ато мотыляет жутко, да ещё и при торможении не держит место 😦 (какие параметры за это отвечают).
Версия мозгов ещё 2.6, ЖПС нету… пропы 10х45, батарея 3300
Немного не по теме: А в режиме Acro как должен управляться коптер? Как самолёт(привязка к компасу отсутствует)?
и ещё: поворот по Yaw на каком стике лучше, ато стоит слева, но при попытке крутить на месте - потеря газа и естественно снижение…