ArduCopter Mega: порт на обычную Arduino (тестим)

на GND что-то надо перебросить
- solder to GND the AD0 pin of the ITG3200
- solder CLK to GND
Там 2-е площадки (1-а тройная, другая двойная), где два контакта их просто нужно замкнуть, где 3-и контакта нужно замкнуть среднюю и землю.
Глеб, по ОСД см. мой блог
rcopen.com/blogs/39391/12024
Мдя…
Залил прошивку, запустил с трудом через mono этот самый настройщик…
“Включите питание приёмника!”
Веселооо: он у меня от контроллера мотора запитан, а контроллеры подключать не рекомендуется…
Ладно, хитро и аккуратно втыкиваю акк… И коптер начинает противно и постоянно зудеть движками “Пииип-пиииип-пиииип…”
Полез в Readme - у меня-то распайка по Мультивию…
И глядя на разводку для движков Пирата - понимаю, что не понимаю НИФИГА! Там банально вся “табличка” вкривь и вкось!!! И если принимать её хоть примерно на веру, то общего с Мультивием не оставили НИ-ЧЕ-ГО ровным счётом!
В итоге имеем:
Мультивий - вечноглючащий.
Пират - абсолютно не-юзер-френдли…
И что хуже - я фз!
НИ-ЧЕ-ГО
Вот только не надо ля-ля?
Табличку надо разворачивать на полный экран. По подключению дрыгателей трешка и квады полностью одинаковы с вием. А вот тип пепелаца в APM_config.h люди постоянно забывают сменить, а также тип датчиков установить правильный.
Все больше склоняюсь к тому, что плата управления должна быть одна и прямая, как палка. Загрузил СофтЪ и полетел сразу. А людям сначала то вий, то алинон, то ффиму подавай с возможностью выбора, а потом ор стоит, что не френдли видите ли.
Как же я теперь понимаю господина Л.Торвальдса 😁
Олег, а можете помочь с вопросом о калибровке регулей? Должны ли они калиброваться независимо от мозгов, как говорил Глеб, или уже подключенными к мозгам? А то у меня вот такая проблема rcopen.com/forum/f123/topic232641/786
Нашел setup - esc, но не понял как его использовать.
И для Х конфигурации датчики должны быть подключены так как указано тут?
плата управления должна быть одна и прямая, как палка
не не, не надо… пусть те кто не осилили небольшую инструкцию покупаю всякие готовые сборные вещи… а мы уж как нибудь на всём кастомном полетаем
присобачил наконец то компас, в GUI чего то дажа после калибровки пульта по центру не 1500… чуть потримировал чтобы было 1506 (чуть дальше 1498)… надеюсь это то что надо =) так и не понял где всётаки центр когда значение 1500 или когда значение по середине между максимальным и минимальным после калибровки и есть ли какая то зона, которая считается центром ±10 например?
завтра надеюсь полетушки всетаки устроить с новым оборудованием =)
где всётаки центр
А центр можно посмотреть (и поменять). Открываешь, где пиды рисуются, и в длинном списке параметров находишь типа pitch_trim, roll_trim и т.п. - это то, что он считает серединой. Можно и поменять.
В центре хорошая дырища в 50-80 шириной.
помочь с вопросом о калибровке регулей?
Регули надо калибровать самому согласно их инструкции. Для этого надо соединить их сигнальные провода, подать вместе на 3-й канал приемника (все это БЕЗ контроллера!), Включить питание с максимальным газом, услышать длинный писк, опустить газ в мин, оно еще там запищит. Вроде бы все. У разных есков по-разному калибровка делается.
У меня, к примеру, перешитые SS25-30, там вообще жестко 1000-2000 зашиты границы.
В центре хорошая дырища в 50-80 шириной.
ну тогда я и без триммирования попадаю =))
дело в том что я стиками вообще ничего не делаю, кроме газа конечно… Моторы по пинам сииидуины, если смотреть сверху:
перед
2 5
Х
6 3
задГрафики вот такие, ссылка на мой альбом, там есть подписи к картинкам
Добрый вечер. Проблема идентичная.
Arduino MEGA 2560, ALLINONE+ 3.3V Setup сделан, все откалибровано, но при взлете сразу заваливается на бок и пытается перевернуться 😦 PIDы правда пока не трогал.
Сегодня подлетнул. ПИДы стоковые. Висит стабильно, с вием не сравнить. Попробывал удержение высоты и был приятно удивлен. Секунд двадцать висел в полуметре от земли. На вие такого не было. В общем понравилось гораздо больше вия. Супер. Олег молодец!!! Завтра попробую сонар и гпс, если погода позволит.
Проблема идентичная.
Глупый вопрос: а тип платы в библиотеке выбрали?
Глупый вопрос: а тип платы в библиотеке выбрали?
Да, конечно.
Кажется нашел свою проблему - надо было для Х конфигурации ставить вот так датчики, а я поставил под углом 45 градусов.
Завтра попробую сонар и гпс
Не включай сонар! улетит
Буквально завтра след. билд будет, где переход баро-сонар пофиксен.
Ничего не понятно, разве на картинке правильно нарисовано направление платы с датчиками??? под углом 45 градусов???
Ничего не понятно, разве на картинке правильно нарисовано направление платы с датчиками??? под углом 45 градусов???
Ну как я понял, на картинке правильное расположение, а у меня датчики стоят вот так:
Блин, где вы эти картинки откапываете?
Официальная - вот

Хм… Тогда странно - если откалибровать регули, как Вы сказали, то выходит следующая ситуация - примерно до 40% газа работает одна диагональ, а потом подключается вторая, но на явно меньших оборотах…
P.S. А картинка откуда? Где-то есть вики по мегапирату?
Блин, где вы эти картинки откапываете? Официальная - вот
Бл*, слава Богу ) А то я уж хотел ППШ доставать
и всётаки спалил я eosd каким то неведомым способом… avrdude выдает Device signature = 0x000000 и нифига не програмится ничего =(
для теста попробовал ардуинку 328p через isp дырку подключить, сказал что Device signature = 0x1e950f
есть возможность эту штуковину под обычную ардуинку (328p) приспособить?
Не включай сонар! улетит
Ок. Не буду
Да, еще такой вопрос: в мультивие все каналы работали как есть, а здесь вперед-назад надо реверсировать. Мне конечно не влом, но для совместимости можно ли где-нибудь в коде поменять. Аппа НК - T6A, а ноут не всегда с собой таскаю.
а потом подключается вторая
У меня такое было. Вылечил новой прошивкой ну и сетап соответственно.
есть возможность эту штуковину под обычную ардуинку
Есть, но придется схему городить. В части видеотракта - обязательно. Схема с встроенным компаратором и двумя резисторами часто дает ложную синхру по строкам.
А еще на 16 МГц 40 символов в строке не поместятся. Проект на Codevision, может, разберешься…
По-хорошему, надо бы сделать для 1280 проца, тогда будет полноэкранная графика, но… лень уже 😃 Возраст, склероз, все дела…
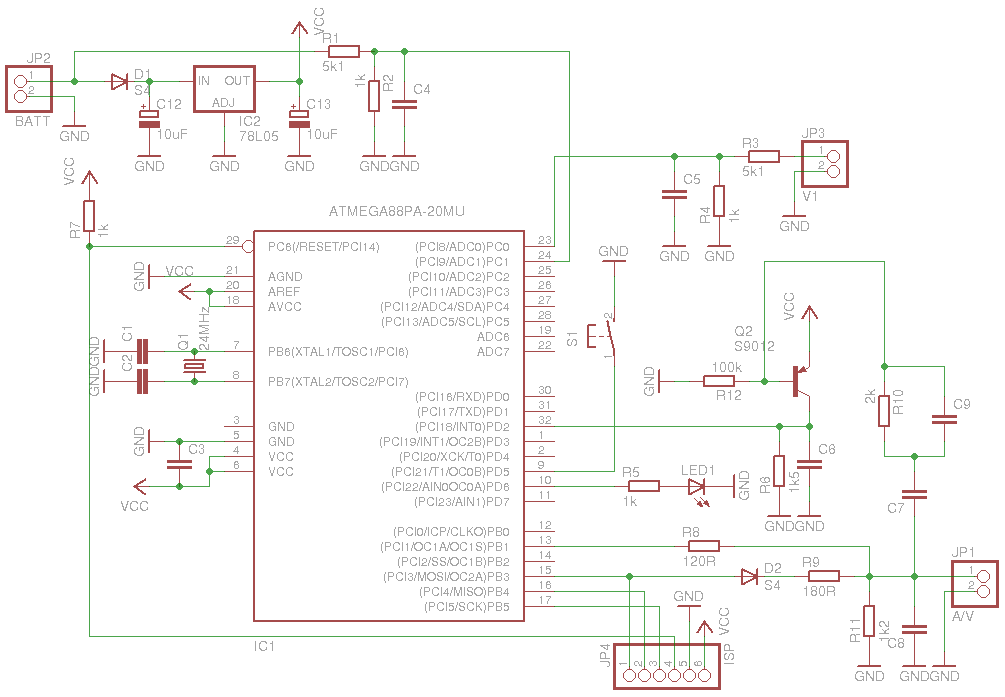
Схема Е-ОСД вот: