А давайте обсудим Arducopter - APM

Контроллер АПМ и контроллер моторов разделены текстолитом с медью
Разделение текстолитом с медью даёт очень низкий процент поглощения наводок,можно даже и не замарачиваться.
АПМ 2.6 с встроенным компасом, ни разу небыло проблемм с компасом.
Да оно и понятно судя по видео
Для начала прошей Atmega32U2
Прошил ничего ни дало, что делать?
Без паники!
- Учить матчасть (по ссылке, которую я уже давал!)
- Ходи туда: ЗДЕСЬ ЖМИ! (вот здесь вообще не реклама!) там всё уже разжёвано
…я почти не волнуюсь и помидоры кончились…
Вроде подключаться стал но не работает баро и аксель…
вопрос стоит в том слать назад на замену или это просто программные проблемы
но не работает баро и аксель…
Проверяй наличие 3.3V
Проверяй наличие 3.3V
Это было первое что я сделал, есть 3.3 на регуле. Шас на экране стоит Bad Gyro Health!
Ни какие датчики не работают, что интересно!
По компасу имел меня такой случай, летаю постоянно с GPS MTK3339 и внешним компасом, поставил UBLOX NEO-6M , после взлёта коптер стабильно повисел 5 минут в Loiter после чего проунитазил и чётко лёг на курс в Китай.
во во один в один ситуация !!! ни кто не знает как её побороть ? на каком то буржуйском форуме нашёл решение в виде заливки конфигурации 3dr ublox в модуль GPS но мне не помогло
Да, у отдельных счастливчиков работает. У остальных нет. Не верите - гугл в помощь.
BT не работает со встроенными модулями ноутов это раз, и не работает со стандартными дровами это два. Тоже поначалу озадачился. Что сделал: купил USB BT, у меня ноут, поставил Bluetooth Stack for Windows by Toshiba(можно bluesoleil), какой то утилитой (не помню как называется) выставил скорость 115200 у модуля подключаемого к АПМ, и всё. Соединяется всегда и с первого раза.
Разделение текстолитом с медью даёт очень низкий процент поглощения наводок,можно даже и не замарачиваться.
Да оно и понятно судя по видео
ну это Ваши догадки, я факты говорю. да с версией ошибся 2.5
во во один в один ситуация !!! ни кто не знает как её побороть ? на каком то буржуйском форуме нашёл решение в виде заливки конфигурации 3dr ublox в модуль GPS но мне не помогло
точно такие же траблы на ublox, прошивка конфига так же не помогла. Последнее, что сделал, положил под ГПСку, кусок 2х слойного текстолита, пока проблема отпала, но рано статистику еще выкладывать. в таком конфиге только 6 миссий отлетал.
я факты говорю
OFF
Какие н@х… факты, тащите суда ваше видео которое вы удалили где Ваш Киборг носится над автотрассой в неуправляемом состояние выискивая жертву. И Вы это называете миссиями? Вы хотите сказать что на его борту всё в порядке. О какой Вы со своей стороны статистике говорите?
За такие полёты уголовные дела заводить надо.
OFF
Какие н@х… факты, тащите суда ваше видео которое вы удалили где Ваш Киборг носится над автотрассой в неуправляемом состояние выискивая жертву. И Вы это называете миссиями? Вы хотите сказать что на его борту всё в порядке. О какой Вы со своей стороны статистике говорите?За такие полёты уголовные дела заводить надо.
при чем тут это видео, не надо из контекста выдергивать. Была заснята проблема, да. скажите у кого их нет, только у тех кто не летает. А судить по этому видео о компасе, тоже самое что о вас по вашей фотографии 😉
не удержался от офтопа.
Помогите сегодня получил ARDUCOPTER v2.6 при подключении Mission planer виснет на считывании параметров (я думаю при иницилизации датчиков) пробывал разные прошивики , хотя софт заливаеться, 3.3в есть, также можно подключиться по терминалу, посмотрел в терминале датчики не работают ни барометр ни акселерометр ни компас? Питание 5в и 3.3 в норме. Залил в менгу 32U2 новую прошивку, без успешно.
Подозрение на шину I2C как проверить? Плату мыл спиртом, смотрел под лупой, оптически все в норме.
ПОМОГИТЕ пожалуйста!
заранее спасибо всем.
Без паники проверить напряжения на мегах и на сенсорах.
И подключится через закладку терминал.
Если чего будет он тебе там напишет.
И за одно узнаешь, хоть что за прошивка там.
Без паники проверить напряжения на мегах и на сенсорах.
И подключится через закладку терминал.
Если чего будет он тебе там напишет.
И за одно узнаешь, хоть что за прошивка там.
Напряжения в порядке, первым делом проверил.
Да подключаеться через терминал, прошивка последняя, работает как бы на 50%, но написал продавцу сегодня вышлет новую, посмотрим. Буду ждать.
Приехал вот этот GPS-модуль для APM2.6
Чё то не могу его прошить 3DR-Ublox…
Лезет вот это окно
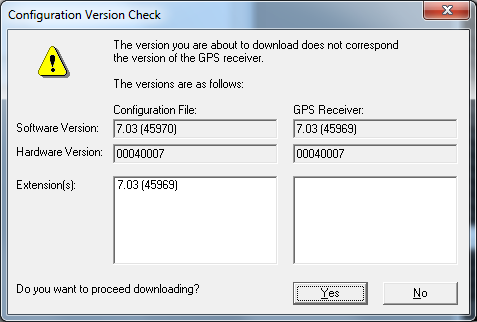
Колонка слева пустая.
На Receiver—>Action—>Revert Config, ноль внимания.
После завершения процесса прошивки предупреждает об ошибке и рекомендует верификацию. Окно не закрывается.
Прошиваю через FTDI.
APM модуль не видит. Пишет No GPS…
Хотя в u-center отрабатывает спутники и показывает 3D. И после загрузки файла с ошибками и после сброса в стандарт.
Пробовал версии u-center 7.0.2 и 8.0.1…
Что ему надо? а?
Лезет вот это окно
Опять же без паники! Окошко с проверкой версии никак не влияет ни на что. Жмем “Yes”, дожидаемся, когда пробегут все команды (не обращаем внимание на ошибки), передергиваем шнурок, переключаем скорость на 38400 и повторяем заливку конфига. Ошибок не будет.
Хотя в u-center отрабатывает спутники и показывает 3D. И после загрузки файла с ошибками и после сброса в стандарт
После заливки 3DR конфига приемник не отдает “лишние” параметры и список спутников с уровнями сигналов не видно. это нормально
APM модуль не видит. Пишет No GPS…
Очевидно конфиг не прописался, он, в том числе, меняет скорость на 38400. APM пытается “снюхаться” с GPS-приемником именно на этой скорости
прошивка последняя
Попробуй через MP залить крайнюю прошивку и потом померить 3.3в. Иногда продавцы заливают некую “модифицированную” прошивку, которая включает стабилизатор 3.3в, соответственно заливка родной прошивки этот стабилизатор выключает.
BT не работает со встроенными модулями ноутов это раз, и не работает со стандартными дровами это два.
Немножко поковырял тему.
Оказывается, проблема не в МП, а в .NET.
Так что у кого МП работает через родной виндовый блютус стек, поделитесь версией .NET framework, плиз.
Теоже самое поимел при попытке прошить через FTDI
Потом не стал заморачиваться и прошил через APM, все встало, и как оказалось даже проще.
В посте #10432 давалась ссылка от hatuul.
Сообщение от Freepooh
кодовое слово: “PILOT_VELZ_MAX”
кажись не совсем то,как японял это максимальная вертикальная скорость,а не скорость реакции на стик газа в альтхольде,ведь не в авто режимах на стик газа реагирует адекватно.
а по моему то
PILOT_VELZ_MAX - максимальная скороподъемность, которую может задать пилот стиком газа при управлении коптером в режимах, использующих удержание высоты по барометру(Loiter, AltHold, Sport). По умолчанию 250,поставить хотя бы 500.
поставил этот параметр 500,но набор высоты в альтхольде как был тормознутым так и остался,к тому же очень не удобно что принулевом положении стика газа в альтхольде моторы не останавливаются,в критический момент просто не успеваешь переключиться на стабилайз,сколько пропов в этом режиме уже угробил,даже и боюсь теперь в альтхольде летать,жаль третьей руки нет)))
Жмем “Yes”, дожидаемся, когда пробегут все команды (не обращаем внимание на ошибки), передергиваем шнурок, переключаем скорость на 38400 и повторяем заливку конфига. Ошибок не будет.
Спасибо, помогло… именно перецмык шнурком. Хотя, я изначально пытался прошится на скорости 38400.
Но как бы то ни было - паника прошла. 😃
У окна 9 спутников, hdop 1.83
поставил этот параметр 500,но набор высоты в альтхольде как был тормознутым так и остался,к тому же очень не удобно что принулевом положении стика газа в альтхольде моторы не останавливаются,в критический момент просто не успеваешь переключиться на стабилайз,сколько пропов в этом режиме уже угробил,даже и боюсь теперь в альтхольде летать,жаль третьей руки нет)))
Там два параметра
Pilot maximum vertical speed (ArduCopter:PILOT_VELZ_MAX)
The maximum vertical velocity the pilot may request in cm/sRange: 50 500
Increment: 10
Units: Centimeters/Second
Pilot vertical acceleration (ArduCopter:PILOT_ACCEL_Z)
The vertical acceleration used when pilot is controlling the altitudeRange: 50 500
Increment: 10
Units: cm/s/s
То есть максимальная скорость и ускорение.
Вам я так понимаю хочется более живого отклика, соответственно ускорения.
Хотя если честно если хочется погонять то это в стабе или акро.
А остальные валенко режимы просто повисеть 😃