А давайте обсудим Arducopter - APM

а в мишн планнере есть какой-нить сброс этих настроек в некий дефолт?
Прошивать не надо, калибровать все по новой надо, в терминале . необходимо набрать команду «setup» и нажать клавишу Enter, затем набрать «erase» и опять нажать клавишу Enter. Необходимо дождаться надписи «EEPROM clear… done», что свидетельствует о том, что память очищена. Далее набираем команду «reset» и нажимаем клавишу Enter. Появится надпись о том, что контроллер необходимо перезагрузить. Нажимаем клавишу «Y» (yes) на клавиатуре, после чего нажимем на кнопку «Reset» на контроллере.
Долго маялся
Напомни, в чем проблема-то?
С которым потом все борются, гуд…это по нашему.
Да ничего подобного. Все зависит только от расстояния до силовых проводов. Сделайте их снизу и будет все хорошо.
5 наших аппаратов летают со встроенным компасом.
Какая то странная у меня проблема. АРМ 2.6, брал на ГЛБ. GPS модуль Хекстроник Lea-6H с компасом, питание от Power-модуля. Прошивка 3.1.5. Отлетал две батареи, в первом полете стрелка направления на ОСД показывала в противоположную сторону. Вторая батарея - все ровно без проблем. Ставлю третью батарею - отказывается армиться. Дома подключаю к МР - ругается при арминге Check mag field.
Прошил 3.0.1. Почистил и откалибровал все заново. Работает все вроде бы, даже подлестнул в комнате. Приехал на дачу - подключаю, опять Check mag field. ЖПС модуль работает отлично, в деревянном доме в середине комнаты 7 спутников. Ничего не понимаю, до этого летал на таком же сетапе пару месяцев, ничего не менял.
Подскажите, в какую сторону рыть?
в какую сторону рыть?
Контакты почистить?
Заменил сгоревший регулятор на новый и вроде горизонт при арминге тоже перестал плыть.
Так как запасных регуляторов больше не осталось, да и в их качестве я теперь сомневаюсь, назревает вопрос… Можно ли ставить другие регуляторы? Прошивка будет одинаковая, SimonK. Или смесь из разных регуляторов будет криво работать с APM?
Да,как оно?, а может кто ещё пробовал MiniApm в форм факторе 35х35 оттуда же?
Поставил. Летает как и полноразмерный. Правда налета пока не много. По некоторой информации у него не работает компас, но у меня работал, правда я его отключил, т.к. есть внешний. И есть косяк с полярностью проводов, там два одинаковых разъема и у них разная полярность. На пластиковом корпусе не все подписи выполнены правильно.
необходимо набрать команду «setup» и нажать клавишу Enter
Актуально только для старых версий прошивки. На 3.1.5 не канает. Сброс в планере.
Check mag field
Калибровать надо в условиях, максимально приближенных к полетным. например калибровать на поле, где больше всего летаете. В других местах может быть неадекват. Проверить легко - поставьте коптер на крышу машины и попробуйте подать питание. Скорее всего будет так же ругаться.
Или смесь из разных регуляторов будет криво работать с APM?
Попробуйте 4 разных регулятора 😃 Очень интересен результат.
Бред. Ну что мешает при покупке первых четырех купить еще 2 запасных?
PS (оффтоп): Ребят, не обижайтесь, но не пора ли задуматься о том, чтоб не создавать себе лишних проблем?
Раз решили заниматься коптерами, самолетами, машинами и т.д., то вы должны представлять, что когда-то оно сломается и придется ремонтировать. Я сам был из тех, кто надеялся собрать коптер со всеми комплектующими за 7т.р. и наслаждаться. Ан, нет, на практике оно совсем по другому! Сначала надо кучу пропеллеров, потом кучу аккумуляторов. После этого настает пора закупать запасные моторы/регули и пару контроллеров.
Если надеяться, что обойдетесь одним комплектом, то тогда не стоит начинать заниматься моделями.
А если к этому делу подойти серьезно, то комплектующих надо сразу на 2 аппарата.
У меня был один запасной… Первый регулятор сгарел еще до того, как я добрался до поля. На самиках у меня регуляторы годами работают… Так что теперь вообще страшновато на этих летать.
Товраищи, можете написать PID’ы с которых следует начинать настройку на раме 450мм (клон DJI), моторах 930kv и винтах 10x4.5? Чтобы хотя бы было, от чего отталкиваться 😃
100% дефолтные. Должно идеально летать.
Напомни, в чем проблема-то?
Проблема в муках выбора, что поставить на квад. Вроде и китайский пиксхок подешевел в разы, но боязно и денег жалко, а тут появилась “исправленная версия 2.5.2”, да еще доставка с хоббикинга - та еще лотерея. Но отдавать много денег за оригинал не хочется. В итоге пал выбор на 2.7. Посмотрим, что за зверь.
краткий полет - сложно ловить коптер при такой амплитуде качения. есть другие варианты?
аппарат раскачивается по ролу и питчу?
пробуете в режиме стабилайз?
100% дефолтные. Должно идеально летать.
У меня на дефолтных хорошо летает с пропами 1047, ставлю 12-е и моментальный переворот, подозреваю что дело в пидах.
аппарат раскачивается по ролу и питчу?
пробуете в режиме стабилайз?
pid.
почему тогда такой же АПМ на этой же конфигурации летал отлично?
А, ну сразу надо было сказать - а то вы информацию как-то по чуть-чуть нам даёте - непонятна ваша мотивация при написании сюда, если хотите получить полезный совет.
rcopen.com/forum/f123/topic233564/1841 © alexeykozin - вообще подобную информацию я всем рекомендую сохранять в отдельный текстовый файлик и потом вчитываться. Мой файл на 22кб вырос уже.
Просетаптись ещё разок, можно и прошивку иную, если решите. А потом отпишите сюда как на настройках по умолчаню у вас всё прекрасно заработало. 😉
PS. Если нет, то ставьте другой АПМ на аппарат и проверяйте. Если будет всё в порядке - ваша версия АПМ возможна глючная. Тут уже надо прокапываться.
pid.
У меня такое было. По методике из видеоуроков вывел на крутилку регулировку ПИДов. Все нормализовалось при 0.23 Но это в режиме Стаб. В Альтхолде свечой взлетает, нужно регулировать уровень Троттл в висении. Пока не получается. На ролике очень похожее поведение, но пилот отпускает стики. Полет в каком режиме был?
Мужики, помогите…
Хочу OSD подключить… До этого FPV системы не было… В первый раз, так сказать…
Подключаю под такой вот схеме. В итоге видеосигнала на мониторе не показывает…
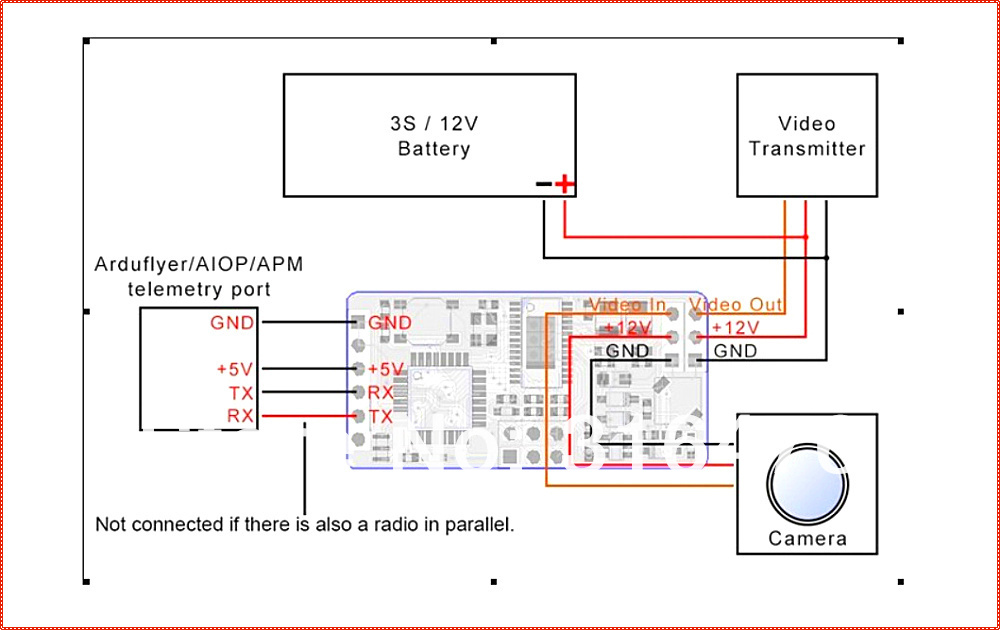
Вот фотки моего подключения…



Коллеги, помогите разобраться, пожалуйста.
Облетывал свежесобранную гексу, после переключения из Loiter в AltHold через некоторое время аппарат улетел свечкой в небо. Такого поворота я не ожидал, в итоге переключил в Stabilize и жестко посадил.
По логам видно, что контроллер поставил ThrOut=100% и держал это значение пока не был выставлен режим Stabilize. В показаниях барометра и GPS глюков не нашел. Прошивка 3.1.5.
Лог прилагаю. Если не сложно, гляньте пож-та.
Мужики, помогите…
Про OSDотдельная тема есть. Там все ответы.
Мужики, помогите…
Хочу OSD подключить… До этого FPV системы не было… В первый раз, так сказать…
Подключаю под такой вот схеме. В итоге видеосигнала на мониторе не показывает…
Не питайте мавлинкосд или минимосд 12 вольтами - питайте 5 вольтами выкидышем с любого свободного контакта АПМ. Возможно, у вас она уже сдохла.
Сдохшая мавлинкосд у меня видео с камеры показывает, но телеметрии нет.
Но вначале проверьте показывается ли вообще изображение на приёмнике (проверка передатчика).
PS. А вообще отдельная тема по осд есть, как правильно заметили и схемы подключения.