А давайте обсудим Arducopter - APM

100% дефолтные. Должно идеально летать.
Напомни, в чем проблема-то?
Проблема в муках выбора, что поставить на квад. Вроде и китайский пиксхок подешевел в разы, но боязно и денег жалко, а тут появилась “исправленная версия 2.5.2”, да еще доставка с хоббикинга - та еще лотерея. Но отдавать много денег за оригинал не хочется. В итоге пал выбор на 2.7. Посмотрим, что за зверь.
краткий полет - сложно ловить коптер при такой амплитуде качения. есть другие варианты?
аппарат раскачивается по ролу и питчу?
пробуете в режиме стабилайз?
100% дефолтные. Должно идеально летать.
У меня на дефолтных хорошо летает с пропами 1047, ставлю 12-е и моментальный переворот, подозреваю что дело в пидах.
аппарат раскачивается по ролу и питчу?
пробуете в режиме стабилайз?
pid.
почему тогда такой же АПМ на этой же конфигурации летал отлично?
А, ну сразу надо было сказать - а то вы информацию как-то по чуть-чуть нам даёте - непонятна ваша мотивация при написании сюда, если хотите получить полезный совет.
rcopen.com/forum/f123/topic233564/1841 © alexeykozin - вообще подобную информацию я всем рекомендую сохранять в отдельный текстовый файлик и потом вчитываться. Мой файл на 22кб вырос уже.
Просетаптись ещё разок, можно и прошивку иную, если решите. А потом отпишите сюда как на настройках по умолчаню у вас всё прекрасно заработало. 😉
PS. Если нет, то ставьте другой АПМ на аппарат и проверяйте. Если будет всё в порядке - ваша версия АПМ возможна глючная. Тут уже надо прокапываться.
pid.
У меня такое было. По методике из видеоуроков вывел на крутилку регулировку ПИДов. Все нормализовалось при 0.23 Но это в режиме Стаб. В Альтхолде свечой взлетает, нужно регулировать уровень Троттл в висении. Пока не получается. На ролике очень похожее поведение, но пилот отпускает стики. Полет в каком режиме был?
Мужики, помогите…
Хочу OSD подключить… До этого FPV системы не было… В первый раз, так сказать…
Подключаю под такой вот схеме. В итоге видеосигнала на мониторе не показывает…
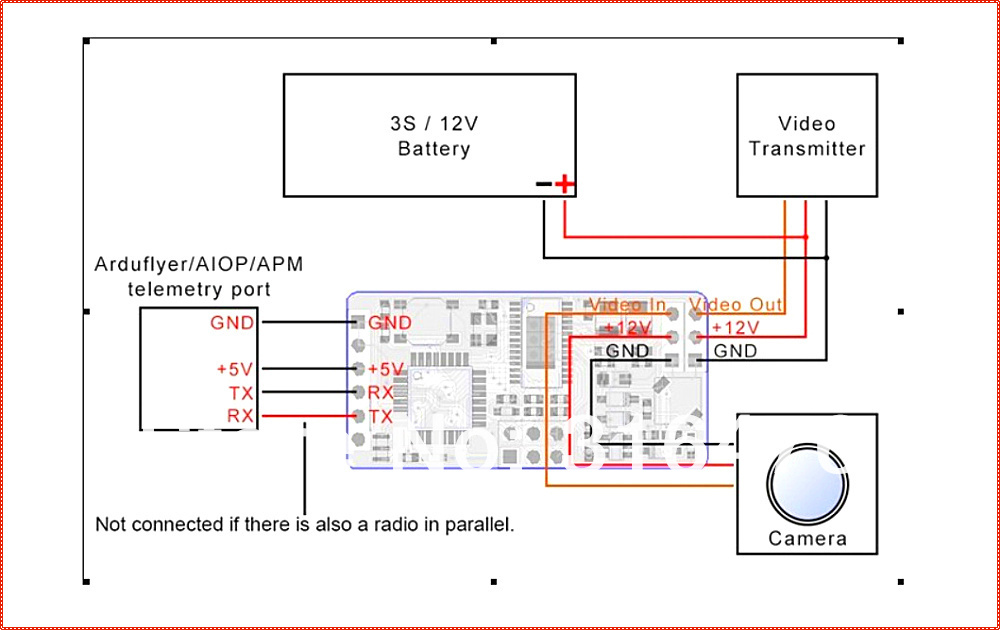
Вот фотки моего подключения…



Коллеги, помогите разобраться, пожалуйста.
Облетывал свежесобранную гексу, после переключения из Loiter в AltHold через некоторое время аппарат улетел свечкой в небо. Такого поворота я не ожидал, в итоге переключил в Stabilize и жестко посадил.
По логам видно, что контроллер поставил ThrOut=100% и держал это значение пока не был выставлен режим Stabilize. В показаниях барометра и GPS глюков не нашел. Прошивка 3.1.5.
Лог прилагаю. Если не сложно, гляньте пож-та.
Мужики, помогите…
Про OSDотдельная тема есть. Там все ответы.
Мужики, помогите…
Хочу OSD подключить… До этого FPV системы не было… В первый раз, так сказать…
Подключаю под такой вот схеме. В итоге видеосигнала на мониторе не показывает…
Не питайте мавлинкосд или минимосд 12 вольтами - питайте 5 вольтами выкидышем с любого свободного контакта АПМ. Возможно, у вас она уже сдохла.
Сдохшая мавлинкосд у меня видео с камеры показывает, но телеметрии нет.
Но вначале проверьте показывается ли вообще изображение на приёмнике (проверка передатчика).
PS. А вообще отдельная тема по осд есть, как правильно заметили и схемы подключения.
Вопрос в симонке и в бхели можно менять параметр несущий частоты импульсов ESC. 12000, 16000, 20000Hz и т.д.
И что надо менять на АПМе?
Кто на какой частоте летает?
У меня на дефолтных хорошо летает с пропами 1047, ставлю 12-е и моментальный переворот
Саш, а вибрации сравнивал?
Актуально только для старых версий прошивки. На 3.1.5 не канает. Сброс в планере.
Есть возможность описать подробнее?
аппарат раскачивается по ролу и питчу?
пробуете в режиме стабилайз?
по обеим осям…
У меня такое было. По методике из видеоуроков вывел на крутилку регулировку ПИДов. Все нормализовалось при 0.23 Но это в режиме Стаб. В Альтхолде свечой взлетает, нужно регулировать уровень Троттл в висении. Пока не получается. На ролике очень похожее поведение, но пилот отпускает стики. Полет в каком режиме был?
лойтер
Саш, а вибрации сравнивал?
Да пока руки не дошли, всё по командировкам шатаюсь. Кстати этот вариант тоже отбрасывать нельзя, “мотормаунты” у меня сделаны из текстолита, достаточно хлибкие… Надеюсь в ближайшие пару недель освободиться и заняться плотненько.
полетал тут первый раз по ФПВ на коптере после самолётов ой как не привычно и в связи с этим возник вопрос.
Как должен себя вести хорошо настроенный коптер с мозгами APM вот в такой ситуации
делаем пролёт вперёд со скорость 10-15 км/ч бросаем стик питча в нейтраль, как должен отреагировать коптер ?
1)принять горизонтальное положение и лететь по инерции вперёд
2)принять горизонтальное положение и пытаться остановится сопротивляться инерции
у меня ведёт себя как описано в первом пункте, вот эта инерция очень сильно мешает летать по фпв
можно ли что то подкрутить чтоб уменьшить инерцию ?
так же заметил ещё вот такое явление в режиме стабилизации выставляем газ на котором коптер висит у меня около 48% летим на этом газу активно работая стиками, и коптер начинает при таких полётах набирать высоту, если стики бросить, то наоборот начинает снижаться
делаем пролёт вперёд со скорость 10-15 км/ч бросаем стик питча в нейтраль
А в каком режиме делается этот пролет то?
Доброго времени суток!
Я вот решил влиться в общество коптеростроителей. Потренировался на WlToys V959.
Заказал все необходимое для FPV (из этого БК подвес для гопро оказался бракованный…)
Пришло время летать и вот столкнулся с проблемой: Bad compass healthy (компас не здоров)…
Я бы купил ему таблетки, да не знал куда класть.
Вот решил написал отчет о танцах с компасом и результатах.
Приобрел вот этот комплект: ru.aliexpress.com/item/…/1892980138.html?promotion…
Все собрал в кучу и все вроде заработало и GPS ловит, и все крутится, вертится, а компас никак…
Что я делал и каков был результат:
- Калибровка – результат 0;
- Прошивка на ранние версии – результат 0;
- Решил перейти на компас, уставленный на плате APM, нашел перемычку замкнул ее и запустил без модуля GPS – результат 0.
КАК ТАК? Значит проблема не в Ublox’е…
Вот тут я и заметил, что на плате вовсе и нету компаса (рисунок):
Позиция 1 – перемычка;
Позиция 2 – Отсутствующий компас.
«Беда» - подумал я…
Воссоединил APM с модулем GPS и УРА – все заработало!
Вывод: Если у вас не работает компас – посмотрите, а есть ли он у вас! И в данном случае для работы внешнего компаса необходимо замкнуть перемычку…
P.S. Надеюсь кому-нибудь поможет мой отчет. Спасибо за внимание 😉
Есть возможность описать подробнее?
rcopen.com/forum/f123/topic233564/12438
Решил перейти на компас, уставленный на плате APM, нашел перемычку замкнул ее и запустил без модуля GPS – результат 0
По умолчанию эти площадки соединены шейкой, т.е. контакт есть. Приглядитесь получше. Уже не получится, разве только если распаять. 😉 Если компас запаян встроенный и его надо отключить, то режем эту шейку. Если встроенного компаса нет, то эта шейка нам не мешает.
Воссоединил APM с модулем GPS и УРА – все заработало!
Похоже у вас просто контакта не было в мелком разъеме или разъем плохо обжат. Проверьте и по необходимости пропаяйте. Снимать контакты надо очень аккуратно, а то пластмаска очень нежная.
Есть у меня квадрокоптер на 650 раме с 25А симонками и на 4 мотрчиках x2212 с 980kv. Вполне красиво летал на 1045 винтах на 3S питании. Но решил я проапгрейдица и поставил моторчики 4220 с 650kv… Прикинул, что на винтах 1045 с таким сетапом врядли под силу столько оборотов будет сделать, ну и поставил из имеющихся винтов 1238 После этого коптер летать отказался… Точнее он способен висеть на 50% газа, но при любых качаниях в СТАБе коптер начинает тупить: разгруженные винты при крене или тангаже могут полностью остановиться и незапуститься… Куда копать? Калибровку всего делал, в т.ч. регуляторов, радио, самого АРМ, компаса… И компассмот тоже - все прошло гладко и в допустимых значениях. Армится тоже без проблем… На АРМ грешить или на силовую установку? 4S спасёт ситуацию или тут что-то другое??
Мужики, помогите…
Братко, глянь сюда, примерно здесь: rcopen.com/forum/f90/topic132831/5367 , а также посмотри ответы уважаемых участников, особенно вот этот пост: rcopen.com/forum/f90/topic132831/5373 и далее, скорее всего, поможет.