Crius Hobby MultiWii

полетел QX на SE прошивка 2.0
8-я секунда просто шикарная 😃)))))))))
По ссыкле, в описании этого GPS, написано, что ему нужно прописать 115200 для работы с Crius… Можно это делать каждый раз при загрузке Crius, но лучше прошить сразу.
Вариантов 2
Поставить еепром для сохранения конфигурации
Записывать конфиг с платы и2цгпс каждый раз при старте
Ну и еще закоротить пару ног, он с 9600 на 38400 съедет но не уверен про частоту…
подключил Eagletree GPS V4 через Logger, прошивка 2.1 - спутники нашел, но глушить пульт пока ссыкатно для проверки режима RTH, так как полеты на этой прошивке менее стабильны по сравнению с 1.9a2
Вариантов 2
Поставить еепром для сохранения конфигурации
Записывать конфиг с платы и2цгпс каждый раз при стартеНу и еще закоротить пару ног, он с 9600 на 38400 съедет но не уверен про частоту…
Ok, с этим вроде бы все понятно. А как мне проверить работу GPS, подключенного к Crius на земле (какое-то GUI может)? Или только при полете будет понятно работает или нет?
Сообщение от funtik26
господа а возможно в криус как то дописать кусок кода, чтобы можно было с пульта включать пару диодов, конкретно интересует даже не просто диоды а мощные диоды через транзисторы. и интересуют режимы горения постоянно и проблесковые режимы
Я чтото подобное в коде видел./******************************** LED FLASHER ***********************************/
//#define LED_FLASHER
//#define LED_FLASHER_DDR DDRB
//#define LED_FLASHER_PORT PORTB
//#define LED_FLASHER_BIT PORTB4
//#define LED_FLASHER_SEQUENCE ( (uint8_t) 0 )
// create double flashes
//#define LED_FLASHER_SEQUENCE_ARMED ( (uint8_t) (1<<0 | 1<<2) )
// full illumination
//#define LED_FLASHER_SEQUENCE_MAX 0xFFНадо почитать или попробовать как оно работает.
ключи уж сами допаяете.
rcopen.com/forum/f123/topic221574/5930 вот тут как раз работа лед флешера на подсветке
MultiWii вот тут как раз работа лед флешера на подсветке
я использую готовый комутатор нагрузки на 5 ампер, он подключается в свободный канал приемника
как мне проверить работу GPS
через гуй мултивия, либо по вспышкам i2c-gps nav. В англоязычном руководстве из 1 Вашего поста, всё описано.
на прошивке 2.1 GPS (от Eagletree) в режиме HOLD - взлететь не возможно, танцует.
на прошивке 2.0 включенный компас перевернул коптер.
прошивка 1.9а2 остается пока самой стабильной в полете.
Сам летаю на 19 а-пока самая стабильная для моих кривых ручек)))))Обычный вий,баро отключен .
Поставил пробный подвес для камеры со “стабилизацией” от мозгов.
Вопрос: можно ли при этом совместить управление камерой с отдельной аппы? Как это сделать?
P.S.: Большое спасибо всем участникам ветки! Благодаря вам теперь мой коптер нормально летает. Ура!
Коллеги, кто нибудь решил проблему с адекватным зависанием (я про бародатчик), потому что с такими инерциями по высотам летать давольно сложно? Шести винтовая модификация будет стабильнее или еще больше гемороя будет?
убейте автофокус в аппарате.
Поставил пробный подвес для камеры со “стабилизацией” от мозгов.
А летать пробовали? как будете определять положение коптера в пространстве?
Я бы не смог. Подвес для пишущей камеры нужен. А курсовая должна быть жестко к раме.
Или я не прав?
Доброго всем времени суток! Решил полетать с headfree (как-то уже писал об этом, перепутал его с MAG) и обнаружил странность - мильтивий не запоминает азимут при включении двигателей,а начальным азимутом всегда считает восток. Компас откралиброван, работает нормально (в гуи адекватно крутится, сверял по нормальному компасу). В чем может быть проблема?
P.S. MultiWii 2.0
А летать пробовали? как будете определять положение коптера в пространстве?
Я бы не смог. Подвес для пишущей камеры нужен. А курсовая должна быть жестко к раме.
Или я не прав?
Всё верно! Так по камере на коптере не полетаешь… )) На подвес цепанул курсовую камеру временно, для экспериментов. А делаю как раз для записи с гопрошки.
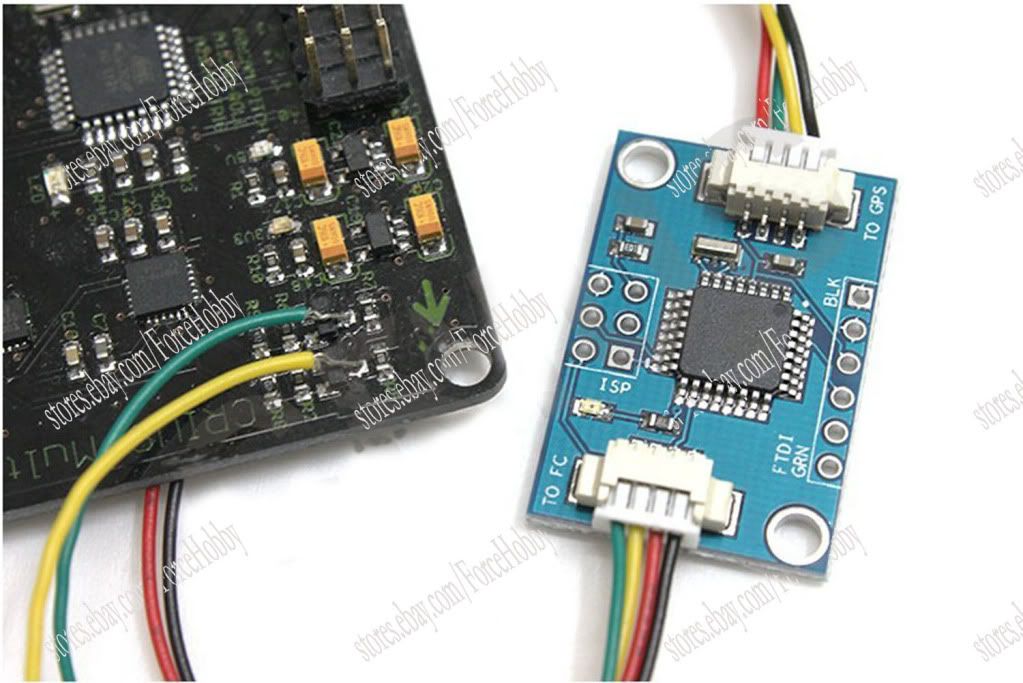
Шьётся ардуиной 1.0.1, FTDI ной платкой или AVRным программатором, архив лежит по ссылке от leprud. Там же файлик есть с описанием как где и что. Кратко если, надо сконфигурировать GPS на 115200 и 5 или 10Hz. Если ublox то мануал здесь. А дальше подключаем последовательный порт от ГПС в платку, платку по i2c к криусу.
Платка умеет маяковать вот так:
If you use i2c-gps, you can watch the status led on the i2c-board. (this is the blue led on
Navigatron).
* 3 short flash at startup
* blinks once per second if GPS is sending data but no position lock yet
* blinks twice fast, then off for a second if GPS 2D position is available
* blinks 3 times fast, then off for a second if GPS 3D position is available
* or goes on for a second, off for a second, (long pulse) if not getting any NEMA sentences for
over 5 secondsНу и в гуе
In the GUI the gray donut around the heading indicator should blink when GPS (either serial os
i2c) is communicating with the Flight Controller.
In GUI poshold and rth box should change color when copter is armed and a solid gps lock is
achieved (numSat>=5).
Павел, это все описано по личному опыту или из документаций?
Я уже перепробовал многое, но к сожалению без результата.
Буду мегаблагодарен, если поможете решить проблему.
Имею
- CRIUS SE v 0.2 (есть разъем TTL: RX TX VCC GRD)
- MultiWii v2.1 (#define I2C_GPS)
- GPS ublox NEO-6M (настраивал согласно www.rcgroups.com/forums/showatt.php?attachmentid=5… , но baudrate все равно потом слетает)
В самом софте, напрямую через FDTI, gps данные показывает, то есть точно рабочий. - I2C-GPS NAV MODULE (перешивал на I2C_GPS_NAV-v2.1rc2.zip с #define UBLOX и пробовал #define GPS_SERIAL_SPEED и 9600, и 115200)
(платы с гудлака)
подключал по разному, и на прямую и с модулем и чего только не делал…
но в GUI ничего не мигает (gray donut around the heading indicator should blink), а только I2C error копятся.
И сам NAV Board мигает ровно скунду LED’ом…
Помогите понять, где я не прав и что поправить?
p.s. В прошивке для nav board еще что-то стоит менять? (например адрес)
по личному опыту или из документаций
По личному, но у меня как я уже говорил спалена rx линия в com порта на ublox и распаян USB, поэтому есть возможность параллельно подключению к нав борду вести конфигурацию.
baudrate все равно потом слетает
У меня тоже слетает каждый раз, потому подключаю по юсб и ставлю при включении.
Но i2c gps nav умеет же конфигурацию выплюнуть в нужный момент? Но я не копал в эту сторону, поскольку у меня ком рид онли.
Мои рекомендации посмотреть в сторону конфигурации скорости при включении с нав борда,
запаять ноги чтобы перейти на 38400 по дефолту,
И сильно меня смущает наличие ошибок и2ц, судя по всему ещё с подключением где то косяк. У меня их нет, пока не видно спутников.
Ну и на крайняк распаивать юсб как у меня для онлайн диагностики.
И я усиленно ищу за вменяемые деньги чипик еепрома.
Перечитал еще раз возник вопрос а вы и2ц плату к юарту цепанули чтоли? Конечно не заработает, на старом криусе и2ц не разведен, его распаивать надо.
Перечитал еще раз возник вопрос а вы и2ц плату к юарту цепанули чтоли? Конечно не заработает, на старом криусе и2ц не разведен, его распаивать надо.
Да, поискал в сети и правда подключаю не верно…
На более современных есть разъем для I2C, например тут 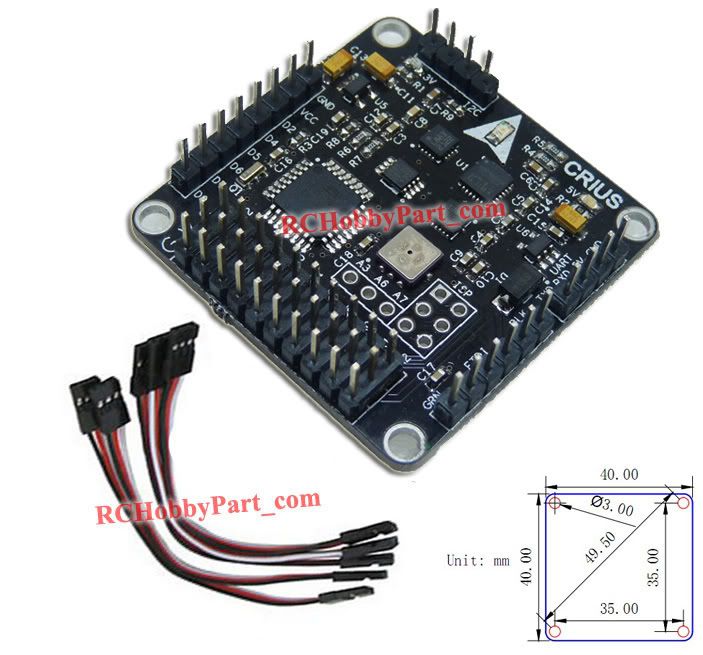
А мне все же придется папаять…
Распаять I2C так?
Решил полетать с headfree (как-то уже писал об этом, перепутал его с MAG) и обнаружил странность - мильтивий не запоминает азимут при включении двигателей
У меня все нормально с HeadFree на 2.0а, взлетаю поворачиваю нос от себя, включаю тумблером HeadFree и он работает, куда бы я и сколько не крутился летит по стику, летел даже от себя к себе крутясь постоянно, страшно было первый раз правда. Только практическое применение для этого режима не вижу, так побаловаться.