Rabbit Flight Controller

хотите блутуз на кроль? ставьте ,3и4 выход ног микрухи usb это тx rx
Не хочу мешать вашей “дискуссии” но вот здесь можно по подробнее? Хотелось бы поставить APC220. Какую скорость ставить? Был практический опыт такого подключения?

Был практический опыт такого подключения?
тут читаем. сам лично только пробовал с разными TTL to USB адаптерами,на данный момент жду посылку с блутузным и WiFi/TTL адаптерами…
тут читаем
Здесь подразумевалась ссылка?

Эх, 57 станиц ( … то есть можно что то подрубить и телеметрия будет на комп валиться?
на комп валиться?
там мужичок именно ради етого и затеял байду с альтернативным ГУЕ и блутузом, телеметрию достаточно и на очки гнать,в хорошо отлаженом коптере она не особо нужна,а вот параметры оперативно менять если коптер корпусной очень удобно…
забросил только kkusa ето дело сальтернативной ГУЕ.

единственная большая проблема ето не русифицированы ГУЕ не имеющий правильного рускоязычного толкования.
как и собственно, англоязычного. дайте мне нормальную англоязычную версию - запилю русскую. а то переводить с китайского на русский (или китайский-английский-русский) - лишняя трата времени.
вышесказанное относится к окошкам, которые появляются при нажатии на кнопки полетных режимов, кнопки настройки стабилизации и проч. (мне вот интересно почитать что там написано, да вот в китайском не силен…)

… ну, флайкамовцы вроде делали русскоязычный вариант какой -то версии.

Достаточно было бы у ГУИ иметь внешний файл инициализации с возможностью локализации на разные языки.

Вчера поймал порцию адреналина. Сидел ковырял 230 прошивку, почему-то не реагирует 8-й канал, хотя подвес стабилизирует нормально но на входе сигнала не видно, торчит значение 1500. Была вставлена 2S батарейка, дышащий режим. И дернул меня черт поставить режим “gimbal” в ГУИ. Реакция была жесткой - моторы рявкнули и коптер рванул. Спасло то, что проводом сбило один винт и аппарат забился в угол с переворотом, там и остался, вращая моторами, естсственно, ни на какие сигналы с ДУ не реагировал, Кое-как пробрался между винтов и выдернул разъем. На удивление, обошлось только одним слегка побитым винтом.
У меня подобная история была на днях на квадрокоптере с НАЗА - квадрик начал крутить винтами после обновления версии прошивки, хотя и был подключен в ЮЗБ порт компьютера.
Так же ситуация была на ранних прошивках с Кроликом, летом тяжелая гекса после перепрошивки тоже решила полетать по студии, потолок то сих пор порубанный местами от 13х6.5 АРС пропов…
Сейчас эта проблема я вижу убрана в софте. Кроме того fail safe у меня отрубает моторы, так же эта функция настроена на канал GEAR, как у вертолетчиков. Поэтому если аппа включена и сигнал есть - можно чуствовать себя спокойнее. Хотя после той ситуации у меня наверное навсегда осталась привычка подключать коптер в закрытом помещении через 12вольт блок питания, чтоб далеко не улетел 😁
чтоб далеко не улетел
У меня с коптером все несколько сложнее=все скрыто в нутри икрышка держиться засчет прикручиваемой антены а акум отсоединяеться снаружы чекой из перемычки (можно вместо нее амперметр ставить) при работе с ГУЕ вырубаю чеку ,снимаю антену подрубаю комп и мозг с ГПС питаються с компа,после порезаных рук и порваной майки с силовой частью настройки не провожу.
сегодня поломал 2 винта изза мороза и неправильных настроек акселя поставил как для 450 рамы начал взлетать и вдруг хлоп резкий кульбит через голову! поставил настройки акселя(balance30/aux8) для меньше 300 полетел плавнеько.
Кстати весной к Вам приезжаем, будем делиться опытом в разведении кроликов))
к Вам приезжаем
это куда?
в LV
в LV
LV большой. бизнес или отдых… а кроликов разводить ето без меня,я по европе до лета.да и подумываю об альтернативе. доведу пятивинтовой на кроле и буду другое искать что то (нравяться нестандартные схемы) .
вот тут подумал=у меня в настройках все зажато до минимума ,может с самой платой какието проблемы ?..Было 4 разных коптера,даже класику на кроле поднял,летало все что на 300 раме что на 600 может немного осциляции были а щас страшно чуйку сдвинуть на 1%…
Всем привет)
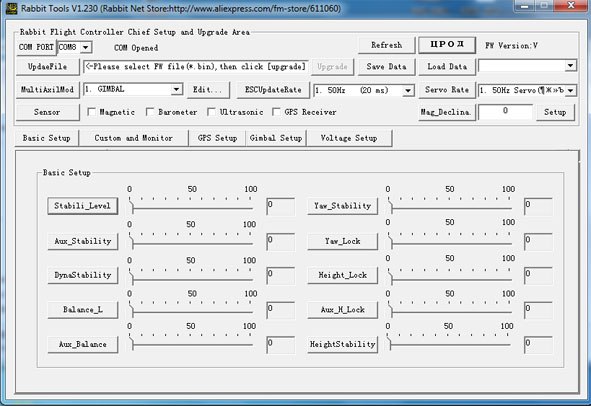
Давайте поговорим за настройки высоты, за что отвечают три последних ползунка в настроечном окне 230й прошивки.
Дело в том что в 12й все было по другому

В 21й я их попросту убрал что бы уменьшить экан.

А вот теперь в 23й хочу вернуться и разобраться – что да как, мне показалось или эта теме в ветке не раскрыта? Пересматривая этот вопрос захожу в тупик.
Вопрос по поводу:
- Height Lock
- Aux Height Lock
- Height Stability
Можно растолковать как:
- Чуствительность баро\сонар
- Зависимость баро\сонар
- Амплитуда баро\сонар

Ваши мысли, советы доводы по этому поводу?
Ваши мысли
с высотой у меня както вообще не сложилось изза глюка сонара посему немогу ничего сказать
Aux H Lock
Зависимость баро\сонар
ето я думаю уровеь на который увеличивает или умеьшает обороты мозг чтобы вернуть высоту
вобще лингвистика что у китайца ,что у вас в рускоязычной ГУЕ странная ,гораздо понятнее термины чувствительность дачика гироскопа ,амплитуда или трэвел,задержка,а не стабилизация и дополнительная стабилизация чего стабилизируем?,
Согласен с Вами, будем исправлятся
Поэтому и поставил вопрос.
Мое видение:
Чуствительность баро\сонар (Height Lock)
Общая чувствительность удержания. Смягчает амплитуду ручки газа в активированном режиме удержания, регулятор высоты до уровня парения.
Зависимость баро\сонар (Aux Height Lock)
Зависимость газа при превышении нужной высоты, чем выше значение - тем меньше область “перепрыгивания” нужной высоты.
Амплитуда баро\сонар (Height Stability)
Малейшие изменения давления имеют больше влияния на газ. Больше значение – большая чувствительность к небольшим изменениям давления, меньше значение – уменьшенная чувствительность к небольшим изменениям давления.
Предложения для понятности обозначить эти пункты в GUI как
Main Altitude
Altitude P
Altitude D
Однако нужно подтверждение общественности.

Поменял UBEC 3A (с ХК) на BEC (взял отдельный регуль от коллекторного движка) и распустил всё с него звездой на кроля, жпс, сонар, приёмник … Вышел почти в поле ) взлетел то без проблем - как обычно, но удержание высоты и позиции вообще не порадовали … по высоте гулять стал мама не горюй - метра на 2 прыгает … такое ощущение что ни баро ни сонара нет в принципе (((( на баро был поролон и мозги ещё в коробке от СД (снизу большое отверстие в дне). Причём в гуи дома сонар до миллиметра всё показывал и баро вело себя вменяемо … так что буду дальше мучать с питанием и настройками … зимой тяжко и муторно конечно настраивать - пробовать в поле … а дома так вообще не понять что да как без нормального полёта )
Снимайте этот бек) Он, сволочь, ужасного качества. У меня при охлаждении выдавал повышенное напряжение и отключался сонар. Попробую кренку.

Я тут последние дни жестко тестировал кролика, делая высотные вылеты для съемки. Фото здесь - www.panoramio.com/user/5186569
Отмечу кое-какие наблюдения. Прошивка - 230.
Вообщем, делал вылеты вверх, по удержанию позиции. До тех пор, пока квадрик ( Н рама 600мм) не превращался в маленькую точку в небе. Спускаться пробовал по разному, но вот проверил такой вариант как газ в ноль. При этом квадрик летит вниз как хорошо подбитая утка. Гоупро на борту при этом снимает панораму 360 градусов, так как коптер кувыркается по жесткому. Даю газ - коптер моментально выравнивается. Убираю газ - снова раненая утка. Даю газ - аппарат снова в горизонте, летим дальше. Это все при включенном акселе. Проверял с целью реакции кроличьего мозга на кашу из показаний акселя и гиры. Дело в том, что когда у меня был мультивий, на гексе при отказе одного мотора( слетел стопор на валу) гекса летела вниз кувыркаясь, абсолютно не собираясь выравниваться, несмотря на эксперименты с газом - в итоге куча разбитого железа с большой высоты и пробитая крыша в сарае. Таким образом, после многократных тестов, кролик дал мне понять, что возможно отказ одного мотора на гексе не приведет к жесткому падению.
В остальном работает все в норме. Только перед каждым взлетом калибровал компас, так как если долго не калибровать я заметил такой глюк - при повороте носа коптера он может начать летать кругами, либо вместо возврата домой полететь совсем в другую сторону. Собственно калибровка избавила меня от этих неожиданностей и я на большой высоте смело крутил коптер по yaw, не боясь при этом, что его снесет в сторону.
Автопосадка с возвратом домой у меня заведена на файлсейв. Специально многократно тестировал - возврат и посадка работают отлично.
Из всех настроек кроля одна единственная потребовала ввод высокого значения - DynaStability. На уровень 80. Это почти полностью убрало раскачку и тряску аппарата при спусках и пролеты стали плавными.
Да, еще поставил винты карбон, дорогие с РЦТаймера. Они валялись у меня полгода, так как я не мог придумать как их надеть на вал 4мм без родной цанги. В итоге на вал мотора усадил 2 слоя прозрачной термоусадки 4мм и два слоя 5 мм. В итоге винт 10 на 4.5 сел очень плотно на вал, и был стянут толстыми стяжками с двух сторон. Звук стал приятнее и вибраций меньше. И лопасти не оторвет на 1100 КВ. Если только опять не выскочит стопорное кольцо. 😁
… впринципе так и есть, я досих пор пользуюсь вот этой гуи ( прошивка 211я) :

где верхняя обведенная красным, это величина Р ( в гуи ошибка, нужно Height Lock Sense) , ну а вторая, AUX Heigt lock) , по всей видимости " I ".
Во всяком случае реакция коптера на изменение этих величин адекватная.
Вплане настроек, у меня методика простая ( за почти год отработанная). т.к. барометр у меня из первых версий, то он не точка отсчета, нужно учитывать его погрешность, а вот с сонаром проще… Подбирая первую величину, смотрю на точность зависания на нужной высоте. каким образом? завесил коптер, подождал немного, щелкнул тумблер, смотрим как висит.если медленно плавает вверх-вниз, то увеличиваю, если начинает подергиваться по высоте ( не путать с осцилляциями от гир), уменьшаю.
Вторая величина, это явно интегральная составляющая. Она хорошо настраивается в режиме автопосадки. если при активации режима, коптер быстро снижается, то маловато, если не долетая до земли вырубает моторы, то совсем копец. Увеличиваю величину. До тех пор, пока коптер точно не сядет, и выключит моторы достаточно быстро.
з.ы. насчет DynaStability спасибки. меня давно доставала проблема, что на скорости и в ветер коптер потряхивает, но поднимать это значение я почему-то (сам не пойму почему) не решался. Летаю с низкими значениями. Надо бы попробовать изменить.
со спусками я гораздо осторожней себя веду. Гекса три с лишним кило весит, если будет кувыркаться, врядли остановишь вовремя…))