Гекса X6 или Y6 - все "за" и "против".

А зачем ?
Та же аиоп месяц может отработать без перезагрузки.
Главное, что бы питание пропадало.
Обычно раньше или регуль сдохнет или обмотка на моторе отвалиться.
Нашёл такую вот схему додэкакоптера для вуконга:
Вот из этого поста www.rcgroups.com/forums/showpost.php?p=27624753&po…
Так же нашёл для КК:

И для назы иная конфигурация fpv-community.de/showthread.php?40473-Tarot-T960-D…
Помогите пожалуйста с последовательностью подключения моторов на Ардукоптере гексы x12. Что-то не получается мне пока переложить вариант с рцгроупс от Фердинанда на апм.
Может проще будет добавить ещё одну плату апм, и сделать две стандартные гексы (соосное расположение моторов) на одной раме? Сразу будет и резервирование системы, дополнительная безопасность не помешает. Винты можно закрутить как в одну сторону, так и в противоположные, перекидкой фазных проводов.
Думал об этом, мне кажется что это перебор. Два мозга даже с одинаковыми пидами и с чёткими одинаковыми настройками в лоитере могут иметь различные данные по гпсам и как результат - колбасня. Теоритически.
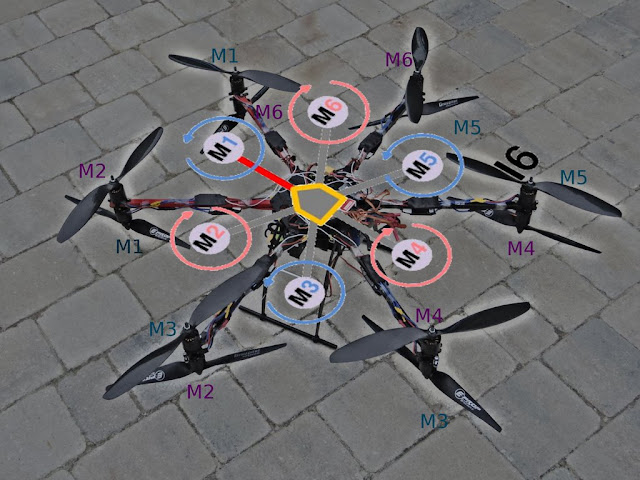
Пока переподсоединяю двиги вот по такой схеме для X конфигурации, но вначале выбираем конфу в АПМе I, а моторы располагаем так:
TOP:
M1_M4
M5___M6
M3_M2
and BOTTOM:
M5_M1
M3___M4
M2_M6
1,3,6 motors are CW, all 2,4,5 motors are CCW
Переподключение пока идёт медленно, по 2 двига в день. 😃
PS. Если кто пошустрее меня, проверьте этот конфиг если интересно.
Два мозга даже с одинаковыми пидами и с чёткими одинаковыми настройками в лоитере могут иметь различные данные по гпсам и как результат - колбасня. Теоритически.
Пусть один мозк будет без ЖПС и просто в режиме “мануал” (гиры)
😃
Пусть один мозк будет без ЖПС и просто в режиме “мануал” (гиры)
😃
Логично.
Для меня это вариант на очень крайний случай. Но вариант. 😃
GPS то можно общий использовать, а вот как они будут аксели интерпретировать 😃
to parahawk: как дело движется с подключением 12 моторов? Заметил такую вещь, наза,вуконг и кук подключаются по схеме 12, если только изначально полётный контролер поддерживает схему лучом вперёд, и нумерация движков идёт по кругу.
Пока переключился на минигексу - жду пока звёзды правильно встанут для вдохновения. 😃
С большой гексой нужно мозгами шевелить, а они у меня сейчас не очень как-то шевелятся. После полнолунья думаю завершу переключение на додике и проверю.
to parahawk: как дело движется с подключением 12 моторов? Заметил такую вещь, наза,вуконг и кук подключаются по схеме 12, если только изначально полётный контролер поддерживает схему лучом вперёд, и нумерация движков идёт по кругу.
А у АПМа лучём вперёд конфа есть, но нумерация двигов не по кругу, в отличие от DJI. Ну ничего, если не сработает - в крайнем случае нарулю иной контроллер.
Нарисуйте конфигурацию Y на шесть моторов, стандартную, только не развалом, а лучом вперёд, если есть такой вариант.
Нарисуйте конфигурацию Y на шесть моторов
в гугле забанили?..
ну тогда так: g.zeos.in/?q=рама коптера y6 чертеж
тут не только нарисовано …blogspot.ru/2013_09_01_archive.html
Что то я не нашёл там описания Y6I конфигурации…
Y6I
У меня такая 😃 Правда в мануле назы IY6 её зовут.

Разговор был об АПМ, как я понял товарища Савилова.
Правильно поняли, об АПМ. Попробуйте такой вариант подключения, по идее должно работать.
Спасибо, если первый вариант не сработает, то попробую.
Решил взлететь на пяти,а он валится на бок и ни как,даже если газку почти в пол,х8 на шасти взлетала.Это получается если на y6 остановится один винт,значит оно будет тупо неуправляемого окружить? Или мне пиды и реакции регулей выкручивать? Мой сет:
Наза 2 ггпс
Рама 550
Моторы 150 вт 1000 кв
Пропы верх 10*4.5 апц,ниниз 10*5.5 апц все версии мр не сф
Релули hobbywing skywalker 20a прошитые Симона (ничего не крутил)
Проводка с запасом
АКБ 5000 3s 25
Вес Вес Аппарата с акб 1450 гр
Центровка без смещений,мозги на середине приклеены вибро пенкой около2-3 мм.
На арду без нижнего заднего точно летит.
Кто может попробовать снять задний нижний винт на и попытаться взлететь,если удасться,отпустить стики и посмотреть как будет вести себя аппарат.
Страшно второй раз 😃
Первый раз мотор просто отпал 😂