Гекса X6 или Y6 - все "за" и "против".

У меня У гекса на дисах 2212 и пропах 11" при весе 1200 гр. с акком потребляет 240 Вт !!! Акк горячий как сковорода,че за нафиг…Реги афро 20А двиги все по очереди проверил на потребление без пропов-все нормально,акк другой ставил. Время не было попробовать другие пропы, скорее всего они виноваты.По расчетам должна потреблять максимум 160 Вт.
Что за пропы то ?
Расчеты не канают для соосника 😦
Счас отбалансирую десятки АРС и попробую . Пропы стоят карбон,заостенные кончики,на стенде мерил-гуано редкое,а по виду супер. 11"
А зачем, и как это соосным системам поможет?
Два контроллера,один страхует другого.
А зачем ?
Та же аиоп месяц может отработать без перезагрузки.
Главное, что бы питание пропадало.
Обычно раньше или регуль сдохнет или обмотка на моторе отвалиться.
Нашёл такую вот схему додэкакоптера для вуконга:
Вот из этого поста www.rcgroups.com/forums/showpost.php?p=27624753&po…
Так же нашёл для КК:

И для назы иная конфигурация fpv-community.de/showthread.php?40473-Tarot-T960-D…
Помогите пожалуйста с последовательностью подключения моторов на Ардукоптере гексы x12. Что-то не получается мне пока переложить вариант с рцгроупс от Фердинанда на апм.
Может проще будет добавить ещё одну плату апм, и сделать две стандартные гексы (соосное расположение моторов) на одной раме? Сразу будет и резервирование системы, дополнительная безопасность не помешает. Винты можно закрутить как в одну сторону, так и в противоположные, перекидкой фазных проводов.
Думал об этом, мне кажется что это перебор. Два мозга даже с одинаковыми пидами и с чёткими одинаковыми настройками в лоитере могут иметь различные данные по гпсам и как результат - колбасня. Теоритически.
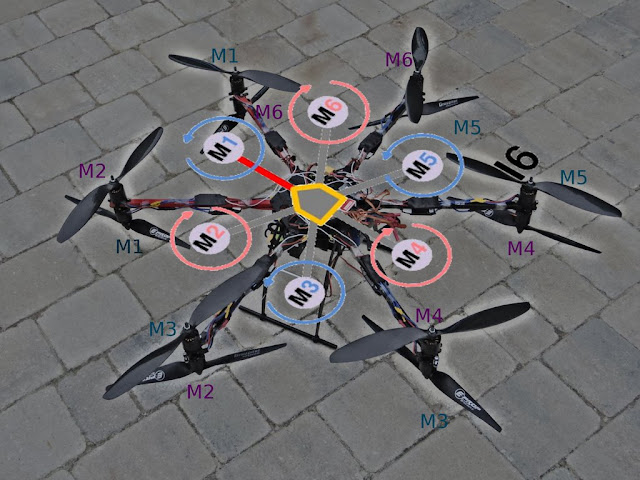
Пока переподсоединяю двиги вот по такой схеме для X конфигурации, но вначале выбираем конфу в АПМе I, а моторы располагаем так:
TOP:
M1_M4
M5___M6
M3_M2
and BOTTOM:
M5_M1
M3___M4
M2_M6
1,3,6 motors are CW, all 2,4,5 motors are CCW
Переподключение пока идёт медленно, по 2 двига в день. 😃
PS. Если кто пошустрее меня, проверьте этот конфиг если интересно.
Два мозга даже с одинаковыми пидами и с чёткими одинаковыми настройками в лоитере могут иметь различные данные по гпсам и как результат - колбасня. Теоритически.
Пусть один мозк будет без ЖПС и просто в режиме “мануал” (гиры)
😃
Пусть один мозк будет без ЖПС и просто в режиме “мануал” (гиры)
😃
Логично.
Для меня это вариант на очень крайний случай. Но вариант. 😃
GPS то можно общий использовать, а вот как они будут аксели интерпретировать 😃
to parahawk: как дело движется с подключением 12 моторов? Заметил такую вещь, наза,вуконг и кук подключаются по схеме 12, если только изначально полётный контролер поддерживает схему лучом вперёд, и нумерация движков идёт по кругу.
Пока переключился на минигексу - жду пока звёзды правильно встанут для вдохновения. 😃
С большой гексой нужно мозгами шевелить, а они у меня сейчас не очень как-то шевелятся. После полнолунья думаю завершу переключение на додике и проверю.
to parahawk: как дело движется с подключением 12 моторов? Заметил такую вещь, наза,вуконг и кук подключаются по схеме 12, если только изначально полётный контролер поддерживает схему лучом вперёд, и нумерация движков идёт по кругу.
А у АПМа лучём вперёд конфа есть, но нумерация двигов не по кругу, в отличие от DJI. Ну ничего, если не сработает - в крайнем случае нарулю иной контроллер.
Нарисуйте конфигурацию Y на шесть моторов, стандартную, только не развалом, а лучом вперёд, если есть такой вариант.
Нарисуйте конфигурацию Y на шесть моторов
в гугле забанили?..
ну тогда так: g.zeos.in/?q=рама коптера y6 чертеж
тут не только нарисовано …blogspot.ru/2013_09_01_archive.html
Что то я не нашёл там описания Y6I конфигурации…
Y6I
У меня такая 😃 Правда в мануле назы IY6 её зовут.

Разговор был об АПМ, как я понял товарища Савилова.
Правильно поняли, об АПМ. Попробуйте такой вариант подключения, по идее должно работать.
Спасибо, если первый вариант не сработает, то попробую.