CRIUS ALL IN ONE PRO Flight Controller

по поводу настройки GPS CN-06 в MultiWii 2.1
Попробовал сделать по упомянутой коллегами ссылке:
www.multiwii.com/forum/viewtopic.php?f=8&t=649&sta…
если делать по инструкции, то шаг 3. In MultiWii.ino replace this: - затык =(
как я понял файл MultiWii.ino называется MultiWii_2_1.ino но в нем нет куска который нужно заменить
Означает ли это, что в новой версии уже пропатчили и ничего делать не надо? Остальные шаги я сделал (добавил строчки, точнее расскоментировал)
Сейчас смотрю на GPS модуль и думаю, а куда его встыкать-то?
воткнул в свободный порт интересная котовасия: гироскопы начинают сходить с ума, вытыкаю - спокойно
где собака порылась?
о, сейчас я Вас закидаю ссылками. Судя по названию поста, у Вас Ublox CN-06, да?
Значит, смотрите.
Первое.
www.multiwii.com/forum/viewtopic.php?f=8&t=2166#p2…
Переведу на всякий случай.
Сначала качаем файлик GPS.zip он там к сообщению прикреплен (ссылка выше). Кладем этот файлик в папку со скетчем, заменив родной GPS.ino на новый из архива.
Добавляем эти строки в config.h в раздел, где GPS config.
//#define NMEA
#define UBLOX
// #define MTK
#define GPS_LEAD_FILTER
//#define GPS_FILTERING
//#define NAV_SLEW_RATE 30
Теперь добавляем иициализацию в multiwii.ino setup() (сразу после объявления самого setup() ):
#if defined(GPS_SERIAL)
#if defined(UBLOX)
UBLOX_init();
delay(200);
#endif
#if defined(MTK)
MTK_init();
delay(200);
#endif
SerialOpen(GPS_SERIAL,GPS_BAUD);
For UBLOX and MTK the GPS_BAUD must be 57600, то есть надо установить baudrate 56700.
Данный мод запускает ГПС в режиме Ublox Binary на скорости 57600, частота обновления 5 Гц. Автор мода утверждает, что режим Ublox Binary лучше, чем NMEA, потому что точнее. В подробности не вдавался, каким именно образом.
__________________________________________
Второй вариант - 115200 и 10 Гц обновления лежит по ссылке www.rcgroups.com/forums/showpost.php?p=22388178&po…
Скажу от себя - пробовал его, ГПС дёрганый какой-то, удержание кое как, а RTL - совсем и не RTL, а по моему “догони меня, если не хочешь потерять”.
Только что получил платку, теперь и я с вами! Планирую Мегапирата, но ничто от Мультивия мне не чуждо 😃
ой, забыл.
После
SerialOpen(GPS_SERIAL,GPS_BAUD);
надо поставить
#endif
Приветствую всех единомышленников. Прочитал всю ветку, только несколько сообщений по делу, FAQ ЖИЗНЕННО НЕОБХОДИМ НОВИЧКАМ!!! На форуме почитал про порт на обычную аруду и вообще моск вскипел!
Хелп ми плиз.
Плата aio crius с mpng 2.7 глючит, а именно
1не работает аксель, и вместо наклона вправо картинка в “планере” наклоняется влево, подскажите как реверснуть?
2 при подключение аккумулятора греются регули “при этом пищат как обычно” куда копать?
3 ещё есть сонар и гпс, куда и как это добро подключить?
4 приемник не пашет, я так понял напряжения нет и выводов на плате три вместо четырех, куда подключить четвёртый ?
Буду благодарен за любую полезную инфу.
Сонар красный 5 пиновый DYP-ME007V1 goodluckbuy.com/ultrasonic-wave-detector-ranging-m…, gps gtpa010 aliexpress.com/…/562113986-100-NEW-MediaTek-MT3329….
1 - так и должно быть
о, сейчас я Вас закидаю ссылками. Судя по названию поста, у Вас Ublox CN-06, да?
Значит, смотрите.
Теперь добавляем иициализацию в multiwii.ino setup() (сразу после объявления самого setup() ):
Огромное спасибо за помощь, Роман!
верно понял сразу после строки void setup() { вставить кусок? (после открывающей скобки фигурной?)
то есть вот так?
void setup() {
#if defined(GPS_SERIAL)
#if defined(UBLOX)
UBLOX_init();
delay(200);
#endif
#if defined(MTK)
MTK_init();
delay(200);
#endif
SerialOpen(GPS_SERIAL,GPS_BAUD);
#endif
далее уже пошел стандартный код:
#if !defined(GPS_PROMINI)
SerialOpen(0,SERIAL_COM_SPEED);
Скомпилил залил, при подключении GPS блока растет счетчик I2С Error и в мониторе макет коптера какой-то дерганный становится
может я его не туда подключаю или питания не хватает? Подключаю в порт куда влезает 4 пиновый мелкий белый коннектор
По питанию - вижу 2 дырки на плате куда можно принаять питание, какой вольтаж? откуда брать? с BEC одного из регулей?
Куда и как подключать сонар? у меня 4 пиновый стандартный синенький
1 - так и должно быть
Это я уже нашел что так бывает, как исправить? И как быть с остальным?
Огромное спасибо за помощь, Роман!
верно понял сразу после строки void setup() { вставить кусок? (после открывающей скобки фигурной?)
да.
Скомпилил залил, при подключении GPS блока растет счетчик I2С Error и в мониторе макет коптера какой-то дерганный становится может я его не туда подключаю или питания не хватает? Подключаю в порт куда влезает 4 пиновый мелкий белый коннектор По питанию - вижу 2 дырки на плате куда можно принаять питание, какой вольтаж? откуда брать? с BEC одного из регулей? Куда и как подключать сонар? у меня 4 пиновый стандартный синенький
так у Вас GPS через I2C подключен? или через SERIAL? Если чере SERIAL, то в config.h должно быть
#define GPS_SERIAL 2
#define GPS_BAUD 57600
#define UBLOX
Питания должно хватать, подключать допольнительное питание не обязательно, но если надумаете - надо будет перемычку удалить. Она рядом с контактами подключения Camera Gimbal.
Про сонар пока непонятно, он в роде в MWCWinConfig есть, но говорят в коде нереализован официально. А я чесно говоря в эту сторону не копал еще, хотя свой сонар тоже жду уже. Вроде как то подключают. Буду искать, если чего-то найду - выложу.
Это я уже нашел что так бывает, как исправить? И как быть с остальным?
Ничего не надо исправлять, это не баг, это фича 😃
По поводу остального - ищите в гугле документ “ALL IN ONE PRO v1.3docx.pdf” там все подробно расписано что куда подключать.
Это я уже нашел что так бывает, как исправить? И как быть с остальным?
Зачем исправлять то, что работает правильно?
Ничего не надо исправлять, это не баг, это фича
Фича ? В нагреве регуляторов? А с перепутанным наклоном право лево она вообще полетит?
Сейчас ситуация такова. Аксели, гиры, баро, работают, регуляторы греются без вращения моторов (холостой ход), сменил частоту на 400hz, не помогло, как быть?
Про сонар пока непонятно, он в роде в MWCWinConfig есть, но говорят в коде нереализован официально.
Я читал что в мультивие он пока вообще никак не реализован - данные с него читаются, но в расчете не используются.
Но может конечно добавили уже.
А с перепутанным наклоном право лево она вообще полетит?
Да не перепутано там ничего, это фича Mission Planner - при наклоне квадрика вправо, горизонт наклоняется влево.
В Wiki специально написано:
Remember how artificial horizons work: when the aircraft tilts to the right, the horizon tilts to the left. (Just tilt your head and you’ll see what I mean). This is normal! Please don’t tell us it’s reversed 😉
да.
так у Вас GPS через I2C подключен? или через SERIAL? Если чере SERIAL, то в config.h должно быть
#define GPS_SERIAL 2
#define GPS_BAUD 57600
#define UBLOX
Питания должно хватать, подключать допольнительное питание не обязательно, но если надумаете - надо будет перемычку удалить. Она рядом с контактами подключения Camera Gimbal.Про сонар пока непонятно, он в роде в MWCWinConfig есть, но говорят в коде нереализован официально. А я чесно говоря в эту сторону не копал еще, хотя свой сонар тоже жду уже. Вроде как то подключают. Буду искать, если чего-то найду - выложу.
сонар подключается так
HC-SR04 Pin GND <-> AIO PRO Pin GND
HC-SR04 Pin Trig <-> AIO PRO Pin 9 TRIGGER
HC-SR04 Pin Echo <-> AIO PRO Pin 10 ECHO
HC-SR04 Pin Vcc <-> AIO PRO Pin 5V
c подключением GPS CN-06 я вконец запутался
Верно ли я понимаю, что:
1- беленький 4 пин разъем под USB это I2C шина
2- сам модуль GPS CN-06 имеет выход SERIAL и его куда то можно подключить напрямую к каким-то тайным пинам на плату?
3- есть плата конвертер SERIAL-I2C но она в принципе не нужна
Как оптимально подключить N-06?
нарыл такую картинку как я понял питание с I2C а RX-TX с S1-S3
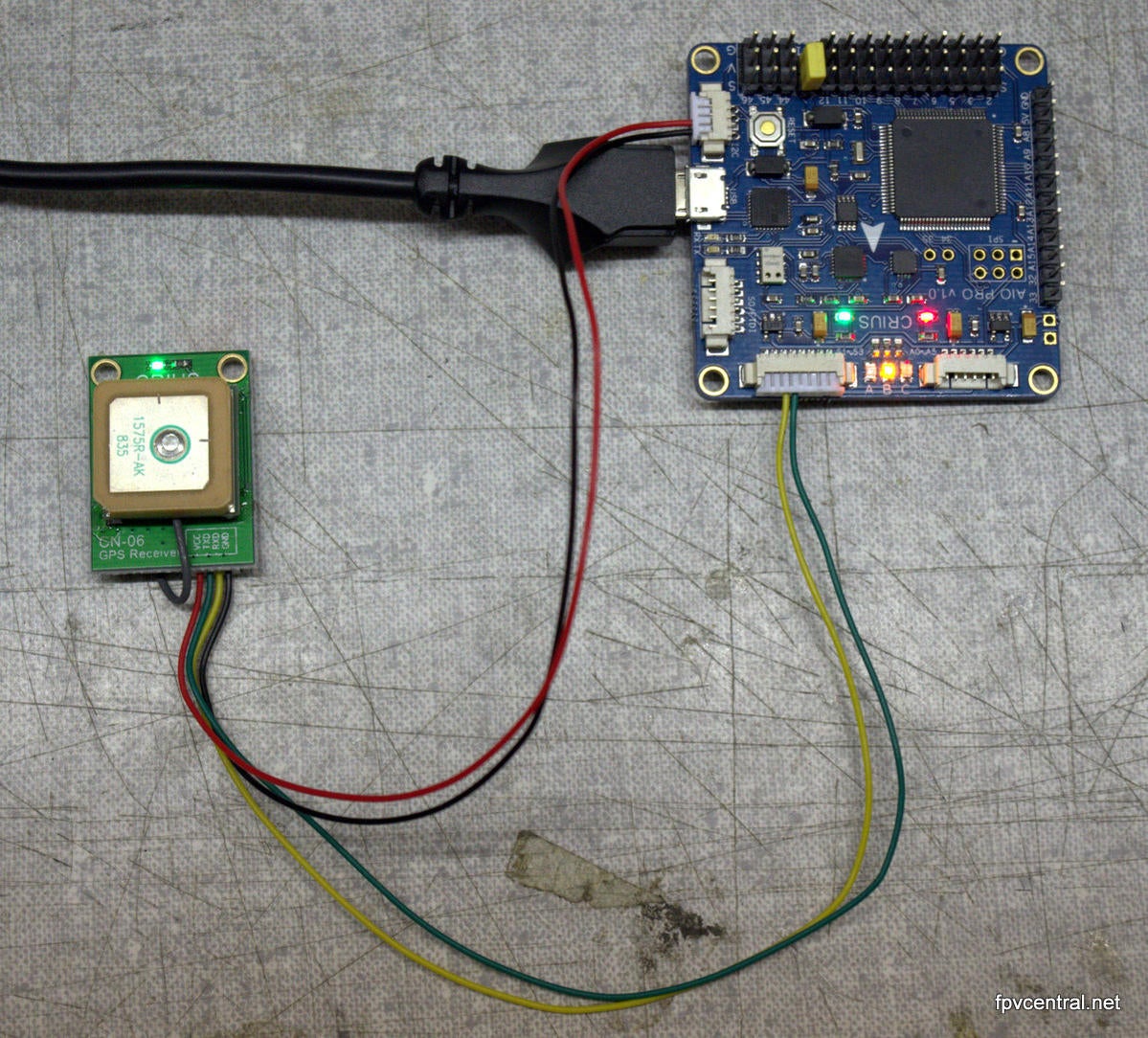
Если память не изменяет, RX2,TX2 с широкого разъема - подаем на GPS, питание и землю для GPS берем с разъемов регуляторов или i2c-порта, как-то так.
На картинке так и есть. Только RX3/TX3 лучше не откусывать с разъема, по ним подключается Bluetooth, модем или OSD.
Если память не изменяет, RX2,TX2 с широкого разъема - подаем на GPS, питание и землю для GPS берем с разъемов регуляторов или i2c-порта, как-то так.
На картинке так и есть. Только RX3/TX3 лучше не откусывать с разъема, по ним подключается Bluetooth, модем или OSD.
спасибо, GPS загорелся зелененьким, ошибки не ползут, но данных GPS в конф панели не видно, к окну поднести что бы спутники поймал и подождать?
Только RX3/TX3 лучше не откусывать с разъема, по ним подключается Bluetooth, модем или OSD.
Лишние провода с разъемом из молекса удобно вытаскивать
Советую присмотреться к новым телеметрийным модулям от DIYDrones: 3DR RadioTelemetry Kit-915 Mhz 3DR RadioTelemetry Kit-433Mhz
Какой из этих двух лучше выбрать - www.ebay.com/sch/i.html?_sacat=0&_kw=3DR+Telemetry
433Mhz или 915Mhz ?
Ребят нужна помощь, получил сегодня ALL IN ONE прошил wii 2.1 Датчики отзываются как положено. решил подключить приемник, сразу раскомментировал #define SERIAL_SUM_PPM а платка не видит пульта, за комментировал обратно тротл откликается как положено, получается что ппм сумм не работает? че за опа?
Все разобрался! Спасибо Leprud. подсказал,
Вообщем ppmsum подключать на RX1
Господа, может спрошу глупость но как мегапирата армить ? Стики двигал не получается…
Если сонар с 5ю концами куда деть вывод “OUT” ??
сонар подключается так
если так подключить, данные в пойдут в MWCWinConfig?
1- беленький 4 пин разъем под USB это I2C шина
да, только это не USB. Он в чистом виде I2C - Data, Clock, GND, V+
3- есть плата конвертер SERIAL-I2C но она в принципе не нужна
В случае платы AIO не нужна.
Как оптимально подключить N-06?
я этим до сих пор занимаюсь, ища в сети все возможные варианты, 2 из них я привел. Но честно скажу, первый сегодня показал себя не с лучшей стороны - пока его проверял, фикса я так и не дождался, даже отлетав один аккум.
А второй вариант на 115200 бод был проверен немногим раньше, и как то он работал, но как я говорил - скачкообразно. Надо либо настраивать ПИДы, что я тоже делал, перебирая разные комбинации, либо этот вариант сам по себе кривой.
нарыл такую картинку как я понял питание с I2C а RX-TX с S1-S3
я по этой картинке и подключал ГПС к плате.
Вобщем вопрос подключения, точнее правильно запуска, ГПС к AIO по SERIAL протоколоу остаётся открытым. Хорошо бы рабочий вариант с режимом UBLOX BINARY, т.к. он точнее, чем NMEA.