PIXHAWK PX4 Autopilot еще одна летающая железка

И ещё забыл упомянуть, на выход любого 5-вольтового стабилизатора по умолчанию вешаю стабилитрон на 5.1Вольт. Главное их достоинство - если им становится совсем плохо, они дохнут в КЗ, а не в обрыв.
Датчики AttoPilot мне не понравились, требуют дополнительной калибровки, значения привираются. Добиться адекватных значений во всем диапазоне у меня не получилось, поэтому от их использования отказался.
требуют дополнительной калибровки, значения привираются.
эт да, особенно показания по току…но так в целом если “с запасом” брать показания то юзабельно…Я их давно использовал, сейчас юзаю побаночное на больших и с модуля Козина на мелком тестовом…
А ссылку можно на побаночный датчик?
Граупнеровский телеметрийный модуль, к пиксу не относится…
Есть еще другие варианты типа фриски - hobbyking.com/…/__58203__FrSky_FLVSS_LiPo_Voltage_…
ништяки пикса о которых никто не знает
те. в коде есть поддержка но как подключать и настраивать никто не знает, возможно за исключением тех кто писал код…
-побаночный контроллер батареи с шиной смбас
-рпм сенсор (сенсор оборотов двигателя) с пвм входом
-бортовой жк индикатор (типа осд)
Вообще побаночный контроль очень нужная вещь, я например 2 раза горел в полете из за бракованных акков ҡогда побаночный контроль мог бы зарешать (горело красиво конечно, как на воздушном параде дымы пускал)…
Через левую телеметрию эт конечно костыли, лучше конечно былоб через полетник и потом с этим совместить - craftandtheoryllc.com/frsky-telemetry-cable-and-us……
ставлю LDO на 5 вольт.
Поставил LM1084IT - в логах питание ничем не лучше импульсника.
Поставил LM1084IT
Я использую MIC39100.
Смотрел осциллографом - шумов меньше где-то вдвое по сравнению с импульсником.
Другой вопрос, а сколько надо? В пиксе все датчики питаются через свои стабилизаторы, которые помехи ещё давят. Процессору вообще пофигу, лишь бы в допуске.
Про двойное питание на Пиксе - питание идет одновременно с power modul и внешнего BEC который втыкается в любой канал где моторы?
Я правильно понял про двойное питание ? или тут есть какая хитрость?
Я правильно понял про двойное питание ?
В целом да
тут все подробно объяснено - ardupilot.org/…/common-powering-the-pixhawk.html
двойное питание
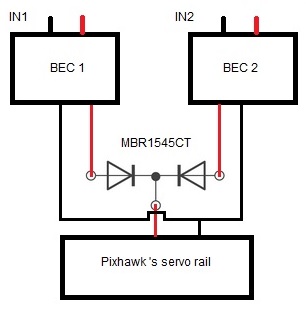
Можно и тройное питание сделать через диодную развязку. Power Module и два бека
[QUOTE=alex_nikiforov;6550460]Можно и тройное питание сделать через диодную развязку. Power Module и два бека
Тройное перебор, двойного заглаза, зачем лишние шумы
В отличии от сотки, с которой были частые потери связи уже на 400 метрах
Ого, 400 метров, у меня 455 телеметрия на полной мощности (20) работает метров на 50-100. Когда у меня пришёл шлем Eachine EV-800, я заметил, что у него и у телеметрии антенны 1-в-1. Может в этом дело?
Спасает только телеметрия Frsky на экране тараниса с помощью Teensy 3.2. Удобно и ловит так же далеко, как управление, километра на два с обычной антенной, вверх до 900 метров приём точно был, дальше ещё не пробовал. Но показываются не все данные, хотя, я думаю, это можно решить поковырявшись в настройках программы.
работает метров на 50-100
Некоторые комплекты телеметрии комплектуются стандартными вайфайными антеннами, поэтому ничего удивительного. Разберите и посмотрите. Для телеметрии подойдут антенны от радиостанций.
А что такого страшного произойдёт, если потеряется связь с телеметрией? Но связь с управлением будет… Продолжит ли коптер полёт в режиме Авто?
В авто полет будет продолжен, а подать команду с наземной станции уже не получится, телеметрии не будет.
Решил настроить аппарат в режиме autotune и понял что он совсем не адекватно ведет, вместо того чтобы крениться влево и вправо, вперед и назад он крен дает в сторону луча и в итоге через некоторое время раскачивается в разные стороны и падает как брошенная монета на пол, в чем может быть проблема? Двигатели у меня конечно старенькие, один горячее другого, может уже в них проблема, или частоту обновления ESC может еще проверить? Какие мысли
Вчера мне показалось, что байка про то, что дроны иногда хотят рвпнуть обратно в поднебесную, имеет место на жизнь 😉
Мой квад без объявления войны начал набор высоты, потом пиликнул бузером музыки тирлим тирлим и начал саой полёт… На апу не реагировал, попытка фэйлсейва так же не удалась. Он поднялся с креном вправо, потом выровнялся и начал улетать… Если бы не высокая береза на его пути, не понять чем бы все кончилось. Вот.
Вспомним детские навыки лазания я его снял. Но как-то не понятно, что это было?
В пиксе есть флешка, на ней есть логи с “что это было”.
Все. Не могу понять в чем дело. Схема Y6B, все настроено, ни каких ошибок, подключение моторов и установка пропеллеров как на схеме. Вместо нормального взлета в Stabilise - оверкиль назад.