Вопрос по IdeaFly 4

Получил долгожданную посылку.
Заказал коптер, зарядку Imax B6, две батареи Turnigy nano-tech 2200mah 3S, приемник Orange RX620.
Минут 20 читал, как забиндить приемник (до того летал только на машинках all-in-one), спасибо за помощь Alex 13 😃
Подключил к ноуту, под Win 7 x64 драйвер поднялся, софт запускается без проблем.
Прошивка залита та же, что доступна для загрузки на их сайте.
Дальше пошло проще - настроил реверс руля, крена и тангажа, окалибровал ход ручек, завел на тумблер управление режимом.
Кстати, нельзя ли как-нибудь доработать DX6i чтобы получить три положения на одном из дискретных каналов? Передаются-то они все равно пропорциональным сигналом?
Подключил батарею - расстояние между штатными липучками больше ее длины и крепится она впритык.
Откалибровал гироскоп, проверил (без винтов) все моторы, особой вибрации не обнаружил.
Прикрутил винты и пошел летать.
Поскольку дело происходило в обеденный перерыв, то полетал минуту дома, а потом минуты 2-3 на улице.
Интересные ощущения после микрокоптеров, нужно привыкать 😃
хм, я думал одна липучка под приемник, а вторая под аккум 😃
хм, я думал одна липучка под приемник, а вторая под аккум 😃
Не думаю. В мануале написано клеить приемник на двухсторонний скотч…
мысль такая появилась после просмотра официального видео, скриншот ниже. Как на самом деле не знаю, пока испытывать не на чем, посылка в пути 😒
А какая батарея будет?
скриншот
дык аккум то тут мелкий стоит, 2200 3s в два раза больше…
У меня нано теки 2650 3S размером чуть больше 2200 и расстояние между липучками что надо, да и в рекомендации на хобях 2650 3S присутствует.
там кстати дальше на видео аккум большой, аккурат на 2 липучки, приемник вообще болтается на проводах 😃 Вот ссылка, 1:48 и дальше:
Сам заказал Turnigy nano-tech 2200mah 3S 25~50C и ZIPPY Compact 2200mAh 3S 35C чтобы было что сравнить
приемник вообще болтается на проводах
Ну так у меня пока он тоже просто между двумя пластинами рамы воткнут, на скорую руку, я думал - я один такой нетерпеливый 😃
Я пробовал с 5000 акк (45-90) тяжело ему, почти на пределе поднимает. Приемник запихал между рамамами на стяжку, тк стоит курсовая камера для фпв.
Новость - появились запчасти на Хоббикинге - есть все налетаем!
У меня коптер в полете начал непрерывно подавать короткие звуковые сигналы, что это может быть? Предполагаю, что это батарея, но в мануале не смог найти описания подобной ситуации.
батарея
Батарея сначала попискивает, потом постоянно пищит и лампочки так же светятся не мигая.
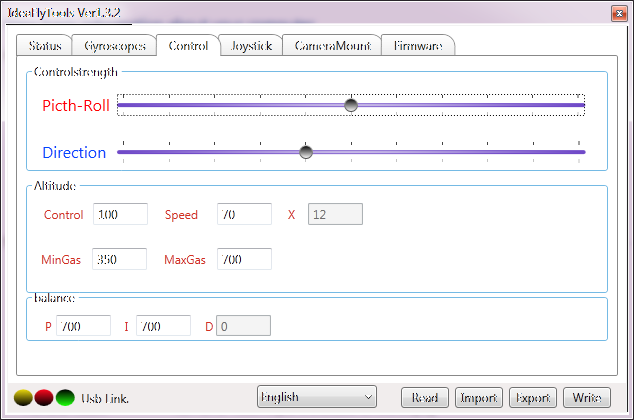
picth roll yaw
p 220 220 334
i 500 500 500
d 400 400 200
Мои настройки:
220 220 334
400 400 500
500 500 200
Батарея сначала попискивает, потом постоянно пищит и лампочки так же светятся не мигая.
А какое напряжение показывается на первом экране IdeaFlyTools?
Мои настройки:
220 220 334
400 400 500
500 500 200А какое напряжение показывается на первом экране IdeaFlyTools?
Я его не подключали после поета к компу. Подключил аккум к зарядке, тот показал ~3.4V на банку, так что скорее всего аккум разрядился. А какие у Вас настройки PID по балансу?
А какие у Вас настройки PID по балансу?
Можно на ты 😃
Появилась новая информация насчет GPS.
В середине апреля планируется пробная поставка вендорам, после выставки в Пекине в середине мая будет начата массовая поставка.
Ориентировочная цена $110 - несколько дороговато, но посмотрим, какой функционал это добавит.
Кто владеет информацией, как их настраивать (PID)? Поделитесь ссылочкой или так ознакомте тут.
Кто владеет информацией, как их настраивать (PID)? Поделитесь ссылочкой или так ознакомте тут.
получил и я коптер 😉 Правда есть одно но - аппаратура еще где-то в пути, так что пока только облизуюсь. Попробовал отбалансировать винты, без балансира на стаканах, на удивление сильно кривым оказался только один. Для остальных точность оказалась выше чем погрешность такого метода. Попробовал поставить винты на моторы, оказывается они разбалансированны гораздо сильнее чем винты, получается идеально балансировать последние смысл нулевой? Опытным путем подобрал оптимальные комбинации винт+мотор, поставил метки, вроде получилось более менее. Жаль винт можно повернуть только на 180 градусов, если бы на 90 было бы поточнее. Получается что плохо сбалансированный винт может компенсировать плохо сбалансированный мотор, главное не переборщить и подобрать комбинацию 😒
Кстати а чем правильно балансируются наши моторы? Скотчем тут не поможешь, веса не хватает, возможно какая-то алюминиевая лента есть?
Я пока не балансировал ни моторы, ни винты, но включая тест моторов по одному особого дисбаланса не заметил, ни без винтов, ни с винтами.
Сейчас попробую замерить вибрации.
Померял без винтов:
motor 1 3.6
motor 2 3.0
motor 3 3.0
motor 4 4.7
Нужно балансировать…
Как балансировать моторы?
Наклейкой изоленты.
Или хотя бы для начала отдиранием бумажек с надписями.