NAZA-M LITE

Добился колебаний, чуть убавил, всё в норме.
Остались вопросы:
1 -
Друзья помогите с настройкой автопилота, квадрик то и дело ныряет на один из лучей и очень нестабилен, всё откалибровал, но в какую сторону крутить автопилот не пойму(
4 режим вращения этих моторов тоже непонятен, не вижу разницы между быстрым и медленным.
какой режим выбрать при такой конфигурации? в режиме high он крутит быстрее, я правильно понял?
2 - Gps пока в планах))) но баро же есть, я хочу добиться стабильного висения на определённой высоте, он то взлетает потихоньку то снижается, как его заставить зависнуть?
3 - Почему очень сильно греются основания моторов и батареи?
4 - вопрос наверно глупый но ещё хочу послушать опытных людей, как лучше и аккуратней приземляться без gps, всё таки подвес с камерой снизу… и я так подозреваю что его у земли будет колбасить, а в руки боюсь не поймаю схватить толком незачто
- режим реккомендет
- путем регулировок гейнов вертикал ( но дрейфовать будет без жпс) баро в назе нет - там акселеометры
- греются потому, что неправильно подобрана винтомоторная группа ( мотор/пропеллер) - есть специальные калькуляторы для подбора ВМГ
- могу дать совет- срочно приобрести шасси- при ловле руками без опыта можно остаться и без пальцев- карбон хорошо их отрезает. При хорошей отстройке мозгов у земли квадр не колбасит сильно. Сажать нужно уверенно и плавно.
Спасибо) шасси есть) за него ловить боюсь он хлипкий) на aiop ловил, там ничего не было страшно)
В режиме low моторы крутятся медленней?
3 - Почему очень сильно греются основания моторов и батареи?
Потому что, у Вас и моторы и винты мало подходят для коптеров вообще, а для коптеров с подвесом и камерой тем более…
пропы 10x6, моторы ntm 300w
Вместо 10х6 лучше поставить 11х4.7, мотору тяжелее крутить винты с большим шагом без набегающего потока воздуха, моторы в идеале нужно заменить совсем, но дело Ваше… У этих КПД чуть выше 70%, угадайте куда деваются остальные 30% сожранной электроэнергии? Правильно, в нагрев…
Мои непонятки с калибровкой стиков кончились. Проблемы были с назой лайт и 6-канальным приемником. Есть еще наза вторая с 9-канальным приемником. Этот коптер еще не доделан, поэтому, на нем свои проблемы не проверял. Теперь проверил - все работает отлично. Переставил 9-канальный приемник на назу лайт - проблемы есть. Получается, что наза виновата:-/
И что теперь делать? Перешить назу не получится - нет прошивки. Просто летать, пока летается?
проверять надо было по другому ,не перестановкой приемника а перестановкой назы тогда уж
помогите начинающему назаводу, можно ли подключить регули на батарею 4S а назу на отдельную батарею 2S?
можно ли подключить регули на батарею 4S а назу на отдельную батарею 2S?
Можно, но смысла нет… Вы потеряете возможность контроля силовых батарей и автопосадки при критическом напряжении на них… Даже если Вам это не нужно, все равно непонятно зачем… Наза потребляет мало, не больше 0.5 ампера… А таскание дополнительного веса, в виде второй батарейки, в те же полампера и выльется…ИМХО
просто ищу причину почему переворачивает коптер при старте. а меня какой то бес укусил назу на 2S подключить из связки 4S (2S+2S) вот и думал что может причина в этом. Сейчас назу подключил на 4S но не проверял еще.
а так регули откалибровал, назу поставил по стрелке, 20 раз проверил подключение последовательности регулев к назе и пропеллеров согласно схемы назы QX, откалибровал стики в программе, а ее все равно переворачивает при старте.
ну еще раз проверьте направление вращения винтов,проверьте при калибровке назы в ассисте как ведут себя аксели
Последовательность моторов правильная? Должно быть против часовой стрелки 1< - 2> - 3< - 4> стрелками направление вращения указано…
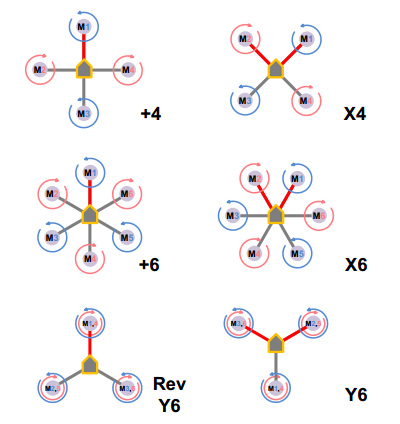
схема x4

так все у меня
Да визуально то понятно… А как разъемы в назу воткнуты? Если переворачивает, значит либо одн мотор не в ту сторону крутит или два луча наоборот подключены…
Сделайте пару раз арм-дизарм, убедитесь что все моторы крутятся правильно… Выставьте газ около 20% (по стику) и не взлетая порулите влево-вправо, вперед-назад… Посмотрите, точно ли коптер в нужные стороны наклоняется…
Naza M Light + GPS
Прошивка 1,0, Софт 1,0
В DJI NAZA-M LITE Assistant во вкладке IMU Сalibration показывает
Acceleration
x 0.4(меняется когда квадр двигаешь) y -15.9(постоянно) z-1.1(постоянно)
Соответственно в момент взлёта квадр переходит в штопор и впарывается в землю.
Перепрошивал, не помогло.
Как исправить данную проблему?
переворачивает коптер при старте
однозначно или нарушена схема подключения моторов к мозгам, или моторы не в правильные стороны крутят или пропеллеры неправильно прикручены к моторам или в ассистанте не правильно указан тип коптера. Вы не забываете в ассистанте после выставления параметров их сохранять?
батарейки здесь не причем
Как исправить данную проблему?
на ветке про назу М давно давно была такая трабла с залипанием датчика…- попробуйте поискать… ну и еще раз перепроверить сборку механики и настройку электроники - начиная с пульта управления - (авиамодель, никаких триммеров, миксов и двойных расходов)
всем спасибо, провода 3 и 4 го регуля в раме перепутались, выяснил поочередным подключением регулей к назе.
на ветке про назу М давно давно была такая трабла с залипанием датчика…- попробуйте поискать… ну и еще раз перепроверить сборку механики и настройку электроники - начиная с пульта управления - (авиамодель, никаких триммеров, миксов и двойных расходов)
не могу найти. буду благодарен за ссыль
ничего не переподключал - такое поведение контроллера после краша стало наблюдаться
такое поведение контроллера после краша стало наблюдаться
Отключите от назы все провода (регули), в ассистанте понажимайте кнопку дефолт на всех вкладках, там где есть изменяемые данные понажимайте кнопку записи после дефолта…
Затем положите назу на ровный стол, лучше по уровню, но можно и без… И откалибруйте IMU… Если не поможет, попробуйте “уронить” назу на что-то не слишком твердое, положите на пол кусок поролона, например, сантиметров с 30-50… Надо ронять так, чтобы наза дном падала… Само собой, надо подключать к компу и смотреть что получилось…
Проблема решилась следующим образом.
Назу отсоединить от всего, снять с рамы и аккуратно постучать чем нибудь тяжёлым, но мягким. Видать, если при краше вместе с ударом пропадает питание (отрывает провода), “залипает” акселерометр.
Тестово полетал в полуметре от земли вроде норм.
Naza M Light + GPS, в настройках остановки двигателей - “Быстрый” (не интеллектуальный).
Хочу проделать следующее: высоко подымаюсь, опускаю полностью стик газа, моторы выключаются, квадр падает (режим ATTI + GPS).
Потом делаю комбинацию запуска моторов. Все будет нормально? Моторы запустятся и горизонт словит?
Или получится горстка запчастей для последующей сборки квадрика? 😉
Дык попробуйте и нам расскажете