Вопросы по iNav

коллеги, вопрос про точность и возможность дополнительных настроек GPS народного модуля Bn-880. Суть в том, что точность моего образца китайпрома порядка 1.0 HDOP при порядка 18ти пойманных спутниках. Прочие модули по моей практике дают точность не хуже 0.5 HDOP. Подскажите, это мне так “повезло” с конкретным образцом, или Bn-880 все такие?
По части настройки - понимаю, что через UBLOX можно попытаться что-то покрутить (выбрать приоритет типов спутников, например), но INAV при запуске все равно отправит в модуль свои установки и смысл настраивать модуль через UBLOX отпадает?

Парни , подскажите…
Хочу нормально настроить фильтры…коптер 650, пропы 15"
Никак не врублюсь, как через INAV Blacкbox Explorer посмотреть эти паразитные частоты.
Кучу видео пересмотрел…в ступоре.

0.5 HDOP
Такое разве бывает? Идеальным значением считается 1.

Такое разве бывает?
Бывает. Но почему-то только под ардупилотом. 😃 Подозреваю, что в настройках включаются разные динамические модели.
По идее, можно попробовать переключить соответствующий uart в passthrough и, не отключая питание, посмотреть ублоксом - что там наконфигурял айнав, а что ардуплейн, но лично мне лень.
Идеальным значением считается 1.
Тут да - даже для коптера разница в точности позхолда при HDOP 1.0 и 0.5 уже особо не заметна, а для самолёта и подавно разницы нет.

Ну помогайте эксперты.
Выведено два канала видео, с курсовой и пишущей на подвесе. На сигнал с курсовой OSD накладывается, на сигнал с пишущей нет. Сигнал с пишущей пропадает чуток быстрее и сигнал весь в полосах. Коммутируется электронным переключателем. Раньше все работало. Как перепрошился на 2.5.1, пропало. Тип сигнала, PAL, на обоих камерах одинаков. Сигнал пишущей пускал и через подвес и на прямую на коммутатор. На коммутаторе местами входы менял.
В чем может быть проблема? Что странно - сигнал идет с помехами с пишущей, с курсовой чистенький.

Парни , подскажите…
Хочу нормально настроить фильтры…коптер 650, пропы 15"
Никак не врублюсь, как через INAV Blacкbox Explorer посмотреть эти паразитные частоты.
Кучу видео пересмотрел…в ступоре.
Ну если вот это смотрели, то думаю более подробно уже не объяснить 😦
Как я понял из постов выше pid-analizer не работает на iNav 2.5 так? Или кому то удалось скормить ей логи?
а вот сделайте OFF
Что то разницы никакой не заметил… А на чем должно отразится?

А хотелось еще на эту серву подмешать крутилку от приемника для управления вручную с отключенным CAMSTAB и корректировать “0” с включенным CAMSTAB
Действительно, а как управлять сервоприводом если он задействован в режиме CAMSTAB ?
Что то разницы никакой не заметил… А на чем должно отразится?
У меня низкооборотные двигатели еле крутились, когда было ON. Но у вас может напряжения хватает, поэтому разницы нет.

Inav 2.5.1 довольно ровно летает в стабе. Матрикс фильтры выключены, только рпм фильтрация включена. Пропы 8045 hq трёшки моторы 2508 racerstar 1275kv. Небольшой лонг-ренж 😆
[QUOTE=Warloсk;7983996]Бывает. Но почему-то только под ардупилотом. 😃
Регулярно бывает и под Айнавом. Но почему то не с BN 888 😦 В качестве примера старинный модуль под NMEA. Скорость 60, высота 70, только взлетел

ON
Вот и оставьте так. Иначе при блокировке пропеллера мотор сгорит, так как будет пытаться раскрутиться. А с включенным параметром, если регулятор видит, что мотор не набрал обороты за определенное время, то отключает мотор. Это спасает при крашах и неудачных посадках.
Особенно, если дизарм на стиках, а не на тумблере.
Ну если вот это смотрели, то думаю более подробно уже не объяснить 😦
до дырок засмотрел…
у Беты все просто - 2 фильтра: 2 несущие частоты и 2 полосы среза…типа понятно., есть несущая частота и диапазон смещения (полоса вправо-влево)
а у Айнава Matrix Filter Min Frequency???..и 2 LPF…??? ни фига не въеду

Inav 2.5.1 довольно ровно летает в стабе.
и не только в стабе, в акро летал, тоже всё четко не считая немного мятых пропов 5", конфиг перенес с предыдущей версии inav настройки без всяких новомодных решений -
фига не въеду
не надо въезжать если не получается, надо интуитивно настроить как лучше ИМХО.
Далее следует на коптере убрать в минимум рейты по PITCH и YAW, а по ROLL сделать 500* в сек. Выключить AIR и включить ACRO. ПИДы по PITCH и YAW убрать до минимума. По ROLL поставить “D” = 0, “I” = 10.
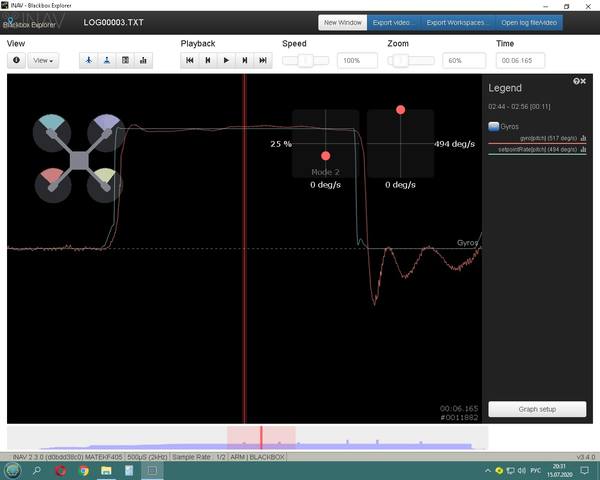
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты. У меня это время все время плавало от 50 до 120 мс, хотя я и старался все время это делать с максимальной скоростью 😉
Вот так выглядит лог с ролллом на стике, а на второй картинке на тумблере

Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты.
Хорошая идея! Я практически бил пальцем по стику, чтобы сократить время его движения.

старался все время это делать с максимальной скоростью
Не забываем что к стикам еще сглаживающий фильтр применяется.
Вообще то, для этого в придумана экспонента. Это чтобы в около центра рулилось плавнее, а при больших отклонениях стика - резче. И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком, вместо того, что бы удерживать позицию.

И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком
В этом же вся прелесть чистого акро, а Вы говорите не отключайте 😃
вместо того, что бы удерживать позицию
Правильнее сказать - сохранить положение в пространстве.

Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум.
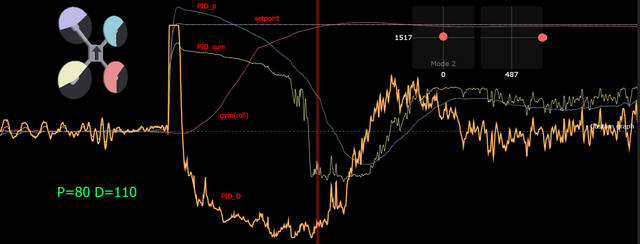
Вот спасибо! Попробовал на тросике. Красивая и информативная картинка.
У меня для 17" получились такие вот оптимальные настройки на тросе (еще не летал) P=80 D=110!!! Ни за что бы не стал поднимать до таких значений если бы навастривал вручную 😃
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?