Вопросы по iNav

А хотелось еще на эту серву подмешать крутилку от приемника для управления вручную с отключенным CAMSTAB и корректировать “0” с включенным CAMSTAB
Действительно, а как управлять сервоприводом если он задействован в режиме CAMSTAB ?

Что то разницы никакой не заметил… А на чем должно отразится?
У меня низкооборотные двигатели еле крутились, когда было ON. Но у вас может напряжения хватает, поэтому разницы нет.

Inav 2.5.1 довольно ровно летает в стабе. Матрикс фильтры выключены, только рпм фильтрация включена. Пропы 8045 hq трёшки моторы 2508 racerstar 1275kv. Небольшой лонг-ренж 😆

[QUOTE=Warloсk;7983996]Бывает. Но почему-то только под ардупилотом. 😃
Регулярно бывает и под Айнавом. Но почему то не с BN 888 😦 В качестве примера старинный модуль под NMEA. Скорость 60, высота 70, только взлетел

ON
Вот и оставьте так. Иначе при блокировке пропеллера мотор сгорит, так как будет пытаться раскрутиться. А с включенным параметром, если регулятор видит, что мотор не набрал обороты за определенное время, то отключает мотор. Это спасает при крашах и неудачных посадках.
Особенно, если дизарм на стиках, а не на тумблере.

Ну если вот это смотрели, то думаю более подробно уже не объяснить 😦
до дырок засмотрел…
у Беты все просто - 2 фильтра: 2 несущие частоты и 2 полосы среза…типа понятно., есть несущая частота и диапазон смещения (полоса вправо-влево)
а у Айнава Matrix Filter Min Frequency???..и 2 LPF…??? ни фига не въеду

Inav 2.5.1 довольно ровно летает в стабе.
и не только в стабе, в акро летал, тоже всё четко не считая немного мятых пропов 5", конфиг перенес с предыдущей версии inav настройки без всяких новомодных решений -
фига не въеду
не надо въезжать если не получается, надо интуитивно настроить как лучше ИМХО.

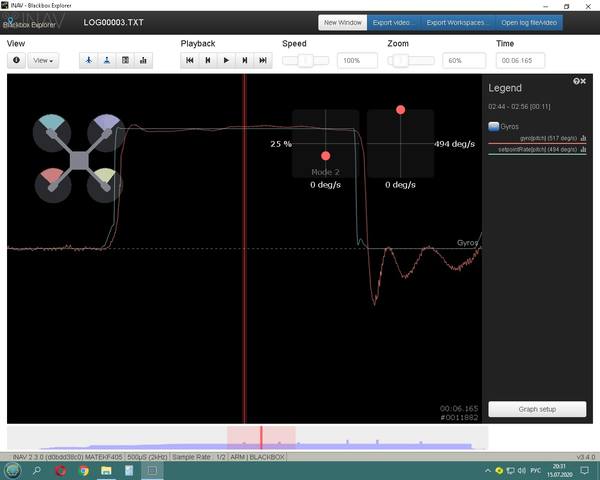
Далее следует на коптере убрать в минимум рейты по PITCH и YAW, а по ROLL сделать 500* в сек. Выключить AIR и включить ACRO. ПИДы по PITCH и YAW убрать до минимума. По ROLL поставить “D” = 0, “I” = 10.
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты. У меня это время все время плавало от 50 до 120 мс, хотя я и старался все время это делать с максимальной скоростью 😉
Вот так выглядит лог с ролллом на стике, а на второй картинке на тумблере

Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты.
Хорошая идея! Я практически бил пальцем по стику, чтобы сократить время его движения.

старался все время это делать с максимальной скоростью
Не забываем что к стикам еще сглаживающий фильтр применяется.
Вообще то, для этого в придумана экспонента. Это чтобы в около центра рулилось плавнее, а при больших отклонениях стика - резче. И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком, вместо того, что бы удерживать позицию.

И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком
В этом же вся прелесть чистого акро, а Вы говорите не отключайте 😃
вместо того, что бы удерживать позицию
Правильнее сказать - сохранить положение в пространстве.

Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум.
Вот спасибо! Попробовал на тросике. Красивая и информативная картинка.
У меня для 17" получились такие вот оптимальные настройки на тросе (еще не летал) P=80 D=110!!! Ни за что бы не стал поднимать до таких значений если бы навастривал вручную 😃
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?
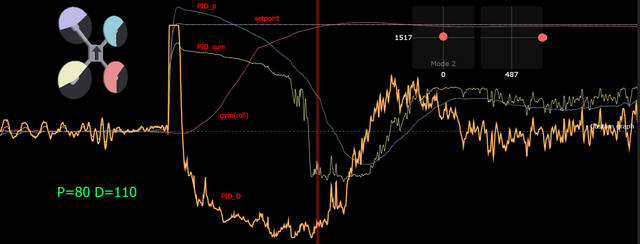
Мне кажется, D не стоит так поднимать. На маленьких коптерах визуально отскок исчезал уже при 10. Точнее уже по камере. Хотя осцилляции при возврате ручки на картинке приличные. Рама тяжелая и разогналась, мгновенно не остановится. А вот P на 2-х коптерах оказался завышен в 1,5-1,6 раза. Теперь полёты, посмотрим.
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?
Поискал и нашёл у себя логи настройки ПИДов 5" дальнолёта. Вот как выглядит один из них. Параметр D - нижний на графике.
Вертикальный выброс D, на вашем графике, скорее всего связан с управлением по ролл тумблером. Попробуйте управлять стиком и сравните.
Вертикальный выброс D,
Я писал не про то что меня смущает выброс в начале , а про зашумленный в общем график, что в с свою очередь будет перегревать моторы. На вашем графике параметр D очень “зализано” выглядит. В настройках отображения графиков параметр expo не нулевой видимо?
Мне кажется, D не стоит так поднимать.
Это получилось не визуально, а инструментально. Вполне возможно моторы будут перегреваться, надо пробовать летать.
есть 2 платы matek 405 str. Одна под свеженьким айнавом 2.5., вторая - под стареньким айнавом 1.9.
Запускаю BLheli Sute для программирования регулей на ноуте через полетный контроллер - подсоединял разные регули и T-motor и RacerStar и нонейм.
В итоге при использовании Полетника под айнавом 2.5 регуль коннектится, но при считывании конфига идет ошибка связи, регуль не определяется, при использовании полетника под айнавом 1.9 - все прекрасно работает как дОлжно.
в чем косяк? не должна же прошивка регуля влиять на возможность подключения регуля к компу через BLheliSute?

но при считывании конфига идет ошибка связи
Аккумулятор подключали? Как вариант попробовать BLheliConfigurator. Прошивал регули на всех прошивках, вплоть до 2.5.1.
Аккум конечно, подключал. Действия одинаковые с обеими платами. Результат только разный… Настройки Айнава влиять ведь не должны? BLheli сам платой ПК рулит?
BLheli сам платой ПК рулит?
Опять же как вариант прошить полетник 2.5.1. Вроде на 2.5 были какие то косяки.