Вопросы по iNav

Как я понял из постов выше pid-analizer не работает на iNav 2.5 так? Или кому то удалось скормить ей логи?
а вот сделайте OFF
Что то разницы никакой не заметил… А на чем должно отразится?
А хотелось еще на эту серву подмешать крутилку от приемника для управления вручную с отключенным CAMSTAB и корректировать “0” с включенным CAMSTAB
Действительно, а как управлять сервоприводом если он задействован в режиме CAMSTAB ?
Что то разницы никакой не заметил… А на чем должно отразится?
У меня низкооборотные двигатели еле крутились, когда было ON. Но у вас может напряжения хватает, поэтому разницы нет.
Inav 2.5.1 довольно ровно летает в стабе. Матрикс фильтры выключены, только рпм фильтрация включена. Пропы 8045 hq трёшки моторы 2508 racerstar 1275kv. Небольшой лонг-ренж 😆
[QUOTE=Warloсk;7983996]Бывает. Но почему-то только под ардупилотом. 😃
Регулярно бывает и под Айнавом. Но почему то не с BN 888 😦 В качестве примера старинный модуль под NMEA. Скорость 60, высота 70, только взлетел
ON
Вот и оставьте так. Иначе при блокировке пропеллера мотор сгорит, так как будет пытаться раскрутиться. А с включенным параметром, если регулятор видит, что мотор не набрал обороты за определенное время, то отключает мотор. Это спасает при крашах и неудачных посадках.
Особенно, если дизарм на стиках, а не на тумблере.
Ну если вот это смотрели, то думаю более подробно уже не объяснить 😦
до дырок засмотрел…
у Беты все просто - 2 фильтра: 2 несущие частоты и 2 полосы среза…типа понятно., есть несущая частота и диапазон смещения (полоса вправо-влево)
а у Айнава Matrix Filter Min Frequency???..и 2 LPF…??? ни фига не въеду
Inav 2.5.1 довольно ровно летает в стабе.
и не только в стабе, в акро летал, тоже всё четко не считая немного мятых пропов 5", конфиг перенес с предыдущей версии inav настройки без всяких новомодных решений -
фига не въеду
не надо въезжать если не получается, надо интуитивно настроить как лучше ИМХО.
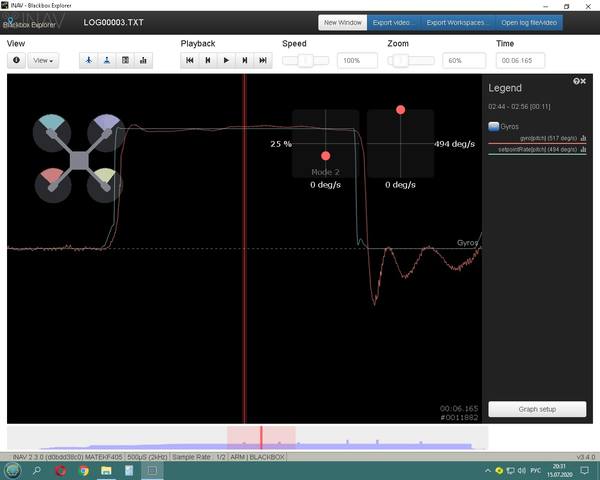
Далее следует на коптере убрать в минимум рейты по PITCH и YAW, а по ROLL сделать 500* в сек. Выключить AIR и включить ACRO. ПИДы по PITCH и YAW убрать до минимума. По ROLL поставить “D” = 0, “I” = 10.
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты. У меня это время все время плавало от 50 до 120 мс, хотя я и старался все время это делать с максимальной скоростью 😉
Вот так выглядит лог с ролллом на стике, а на второй картинке на тумблере
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты.
Хорошая идея! Я практически бил пальцем по стику, чтобы сократить время его движения.
старался все время это делать с максимальной скоростью
Не забываем что к стикам еще сглаживающий фильтр применяется.
Вообще то, для этого в придумана экспонента. Это чтобы в около центра рулилось плавнее, а при больших отклонениях стика - резче. И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком, вместо того, что бы удерживать позицию.
И, если летать в акро, то ни в коем случае не отключайте Air mod, иначе при нулевом газе коптер будет лететь кувырком
В этом же вся прелесть чистого акро, а Вы говорите не отключайте 😃
вместо того, что бы удерживать позицию
Правильнее сказать - сохранить положение в пространстве.
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум.
Вот спасибо! Попробовал на тросике. Красивая и информативная картинка.
У меня для 17" получились такие вот оптимальные настройки на тросе (еще не летал) P=80 D=110!!! Ни за что бы не стал поднимать до таких значений если бы навастривал вручную 😃
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?
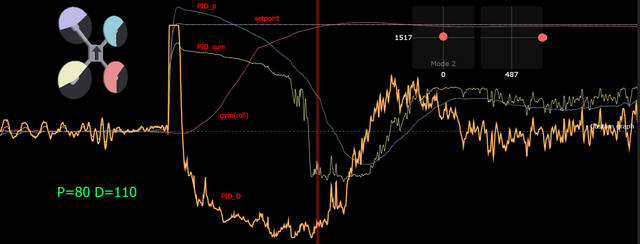
Мне кажется, D не стоит так поднимать. На маленьких коптерах визуально отскок исчезал уже при 10. Точнее уже по камере. Хотя осцилляции при возврате ручки на картинке приличные. Рама тяжелая и разогналась, мгновенно не остановится. А вот P на 2-х коптерах оказался завышен в 1,5-1,6 раза. Теперь полёты, посмотрим.
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?
Поискал и нашёл у себя логи настройки ПИДов 5" дальнолёта. Вот как выглядит один из них. Параметр D - нижний на графике.
Вертикальный выброс D, на вашем графике, скорее всего связан с управлением по ролл тумблером. Попробуйте управлять стиком и сравните.
Вертикальный выброс D,
Я писал не про то что меня смущает выброс в начале , а про зашумленный в общем график, что в с свою очередь будет перегревать моторы. На вашем графике параметр D очень “зализано” выглядит. В настройках отображения графиков параметр expo не нулевой видимо?
Мне кажется, D не стоит так поднимать.
Это получилось не визуально, а инструментально. Вполне возможно моторы будут перегреваться, надо пробовать летать.
есть 2 платы matek 405 str. Одна под свеженьким айнавом 2.5., вторая - под стареньким айнавом 1.9.
Запускаю BLheli Sute для программирования регулей на ноуте через полетный контроллер - подсоединял разные регули и T-motor и RacerStar и нонейм.
В итоге при использовании Полетника под айнавом 2.5 регуль коннектится, но при считывании конфига идет ошибка связи, регуль не определяется, при использовании полетника под айнавом 1.9 - все прекрасно работает как дОлжно.
в чем косяк? не должна же прошивка регуля влиять на возможность подключения регуля к компу через BLheliSute?
но при считывании конфига идет ошибка связи
Аккумулятор подключали? Как вариант попробовать BLheliConfigurator. Прошивал регули на всех прошивках, вплоть до 2.5.1.
Аккум конечно, подключал. Действия одинаковые с обеими платами. Результат только разный… Настройки Айнава влиять ведь не должны? BLheli сам платой ПК рулит?