Полетные контроллеры Matek Systems

В первом посте темы помимо картинок стоило бы выложить чем они отличаются и что имеют на борту. Это если быть логичным исходя из названия темы.

Аж медь, не поглядел внимательно на картинку… на моем проводков больше, шесть, и два разъема. Компас заявлен.

Стоил 35 долларов. Много это или мало, не знаю. Если посоветуете лучше этого, куплю другой.

на моем проводков больше, шесть
Ну, тогда нормально.
Стоил 35 долларов
Есть большая вероятность, что там настоящий Юблокс и настоящий 883 компас, а то в дешевые что только не пихают…)
Если не лень, снимите крышку и сфоткайте плату, пригодится кому нибудь…)
снимите крышку
Тэк-с…
Вот.

Год на плате смущает)) Что-то древнее, как овно мамонта, наверное)


Скажите пожалуйста к контролеру Matek F405 CTR приемник по PWM можно подключить?
Если да то не могли бы сказать куда припаивать провода?
…приемник по PWM можно подключить?
… куда припаивать провода?

Вот.
Компас настоящий… А вот батарейку опять рядом с компасом влепили…)
В общем, модуль неплохой, сравнимый с BN-880, за исключением того, что у 880 антенна активная.
Только что-то не могу его запустить в конфигураторе.
В портах выбираете ЖПС на нужном порту и скорость 115200 делаете Сэйв/Ребут. В кофигурации включаете галочку Жпс, опять сэйв/ребут…
Только ЖПС/компас не будут работать без батарейки, от ЮСБ туда 5 вольт не идет.
Не запоминает он порты. И галочка постоянно сбрасывается после ребута. Питание внешнее подано.
Я олень. Разобрался. Слайдер напротив порта двигать не надо было, просто выбрать GPS. Пля, темный лес…

Доброе время суток! Подскажите новичку. Как правильно подключить зуммер(пищалку) два провода к контролеру Matek F405 CTR ? Есть опасение что может выгореть порт.

Доброе время суток! Подскажите новичку. Как правильно подключить зуммер(пищалку) два провода к контролеру Matek F405 CTR ? Есть опасение что может выгореть порт.
если это обычная 5в активная пищалка, то двумя проводами: просто “+” пищалки к “5V” полетника, а “-” пищадки к “Bz-” полетника.

Если это, скажем, пищалка матек, то тремя проводами: “5V” пищалки к “5V” полетника, “G” пищалки к “G” полетника, а “B-” пищалки к “Bz-” полетника.

Андрей огромное спасибо. Пищалка 2 контактная как на 1 фото. Просто было опасение что порт не выдержит.
Спеки Matek F405-CTR, дабы далеко не ходить… А если ходить, то туда: www.mateksys.com/?portfolio=f405-ctr
FC Specifications
MCU: 168MHz STM32F405
IMU: MPU6000 accelerometer/gyro (SPI)
Baro: BMP280 (I2C)
OSD: BetaFlight OSD w/ AT7456E chip
Blackbox: MicroSD card slot (SD/SDHC)
VCP, UART1, UART2, UART3, UART4, UART5
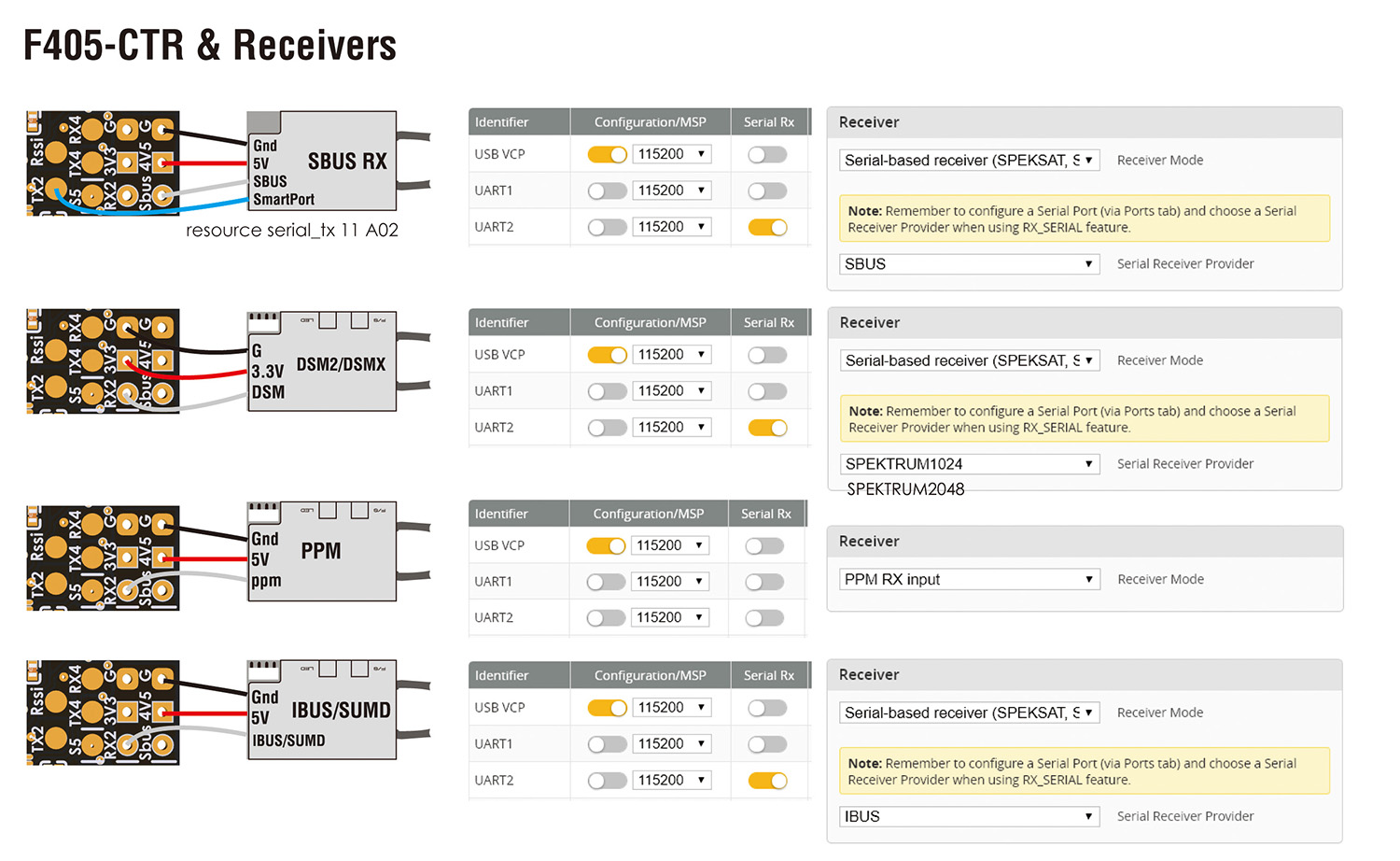
Built in inverter for SBUS input (UART2-RX)
PPM/UART Shared: UART2-RX
SoftSerial on TX2, S5 or S6 optional
Camera control on S6 or DAC optional
Smartaudio & Tramp VTX protocol supported
WS2812 Led Strip : Yes
Beeper : Yes
RSSI: Yes
PDB Specifications
Input: 6~30V (3~6S LiPo) w/TVS protection
PDB: 4x30A (Max.4x46A), 6 layers*2oz copper PCB
BEC: 5V 2A cont. (Max.3A)
LDO 3.3V: Max.300mA for Spektrum RX
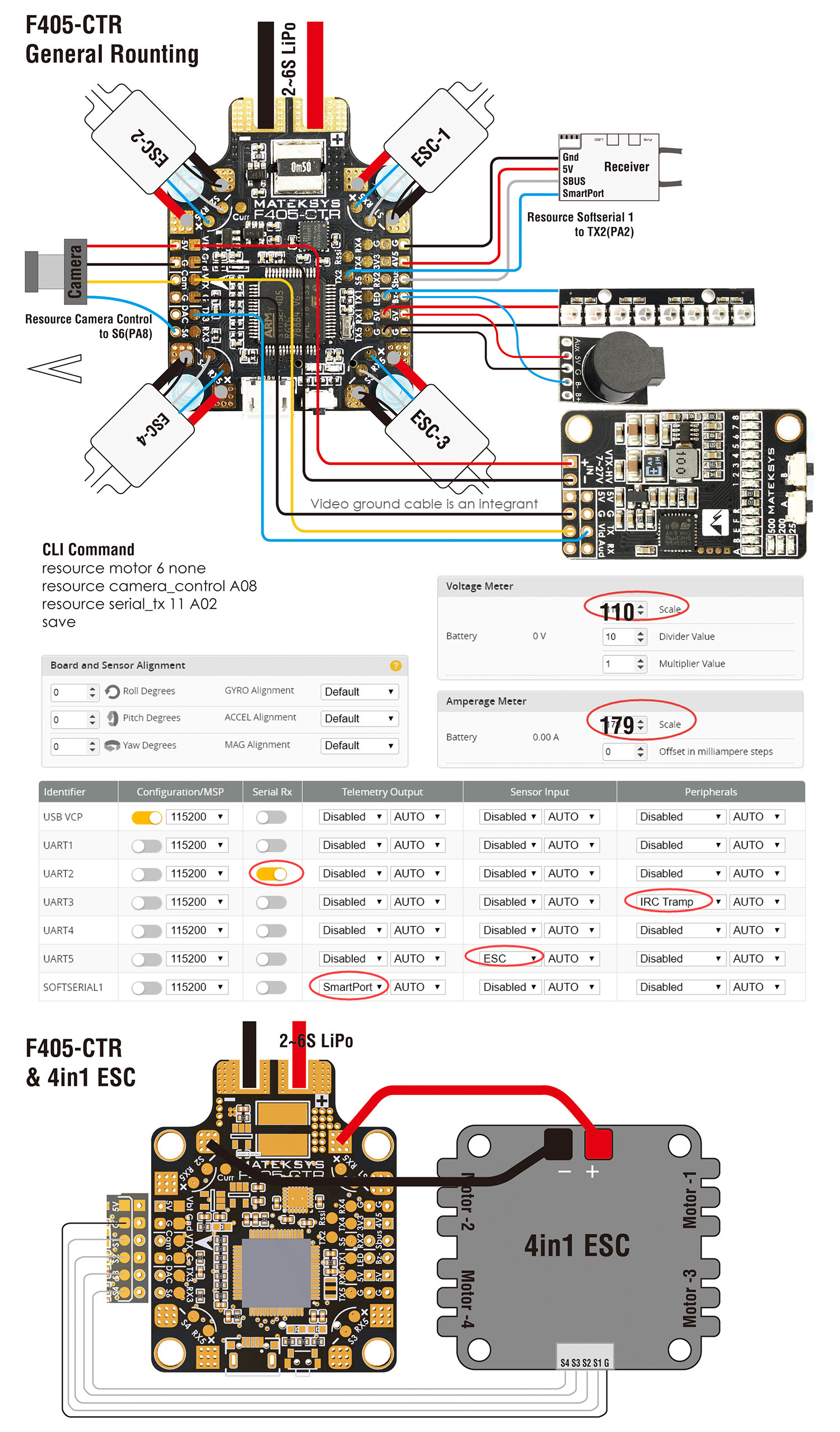
Current Sensor 184A (Scale 179)
Battery Voltage Sensor: 1:10 (Scale 110)
3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
6x PWM / DShot outputs without conflict
5x UARTs
1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
4x pairs of corner pads for ESC Signal/GND connections (DSHOT compatible)
1x pair I2C1 pads
1x Side-press button for BOOT(DFU) mode
36x46mm PCB with 30.5mm mounting holes
10g
BF pins definition:
Pad/Hole PIN TIM Resource option
PPM PA3 TIM5_CH4
S1 PC6 TIM3_CH1
S2 PC7 TIM8_CH2
S3 PC8 TIM8_CH3
S4 PC9 TIM8_CH4
S5 PA15 TIM2_CH1 LED_STRIP, serial_tx 11
S6 PA8 TIM1_CH1 camera_control
2812 LED Strip PB6 TIM4_CH1
TX4 PA0 TIM5_CH1 serial_tx 12 (BF3.2.3)
RX4 PA1 TIM5_CH2 serial_rx 12 (BF3.2.3)
TX2 PA2 TIM9_CH1 serial_tx 11 (BF3.2.3)
DAC PA4 camera_control (BF3.3)
S5 (PA15) or TX2 (PA2) can be resourced to softserial for Frsky SmartPort
2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro.
2812LED can be resourced to S5 (PA15) if using Baro the same time with BF firmware
S6 pad (PA8) can be resourced to Camera Control
CLI commandresource motor 5 none
resource led_strip 1 A15
resource motor 6 none
resource camera_control A08
resource serial_tx 11 A02
save
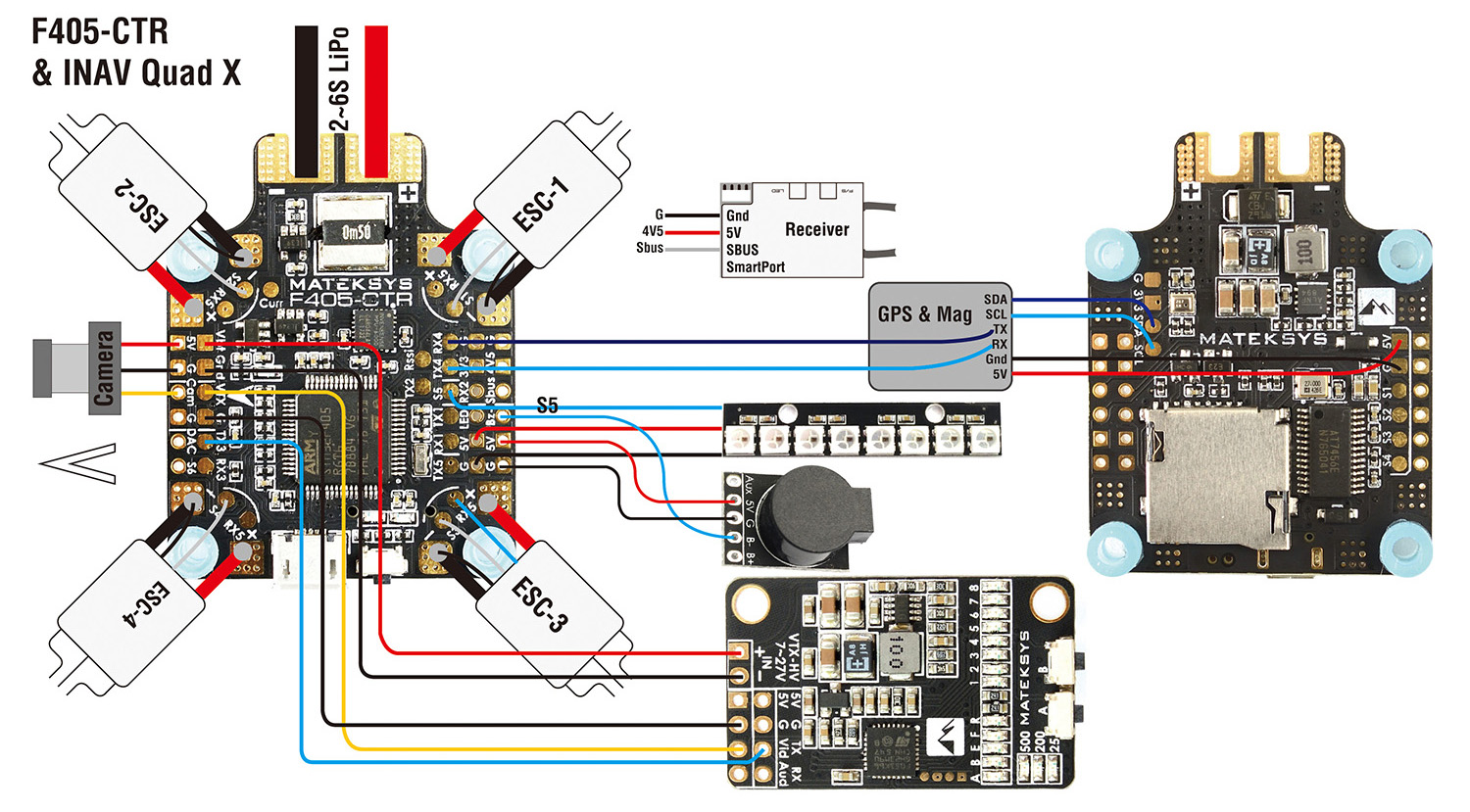
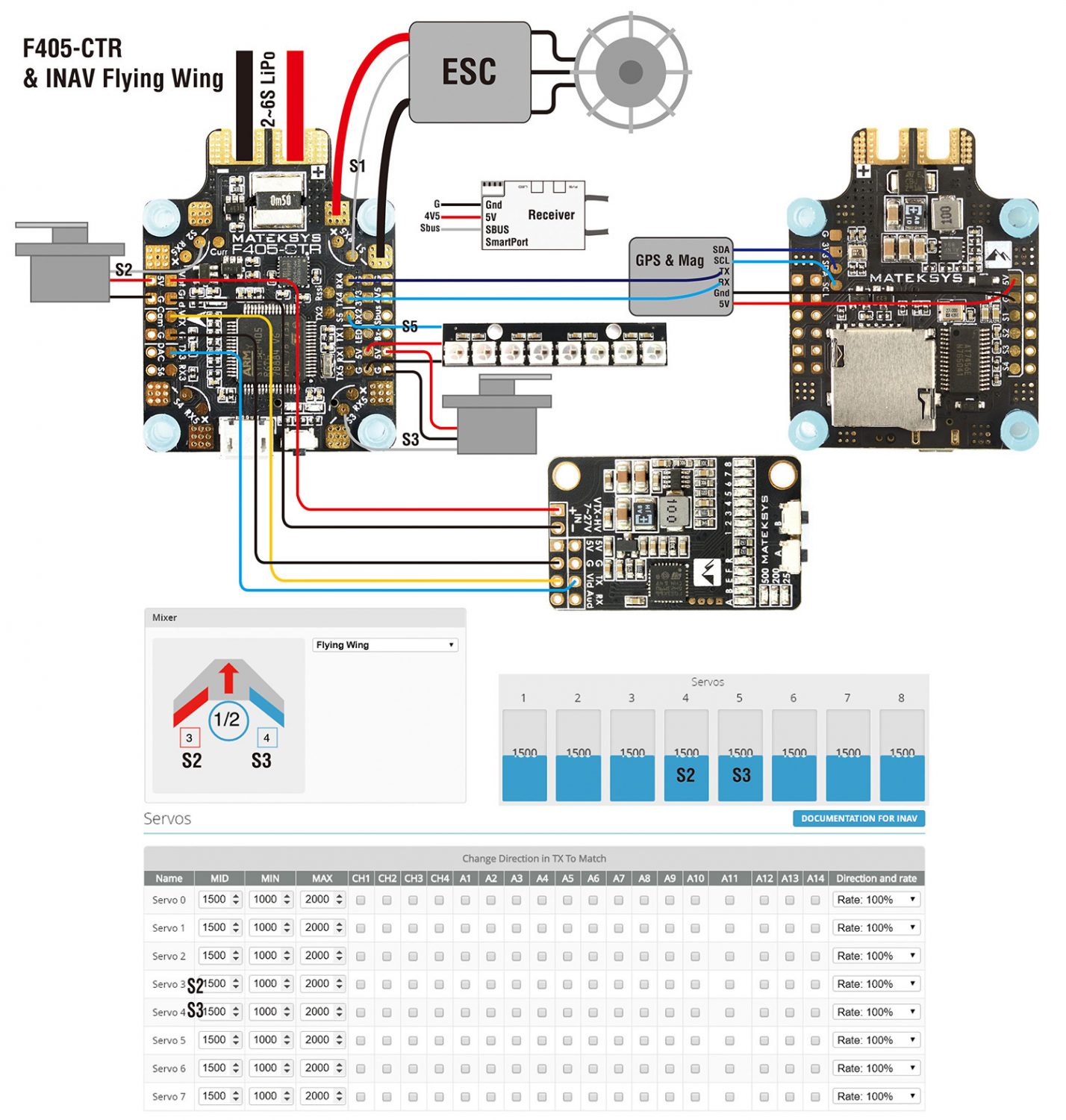
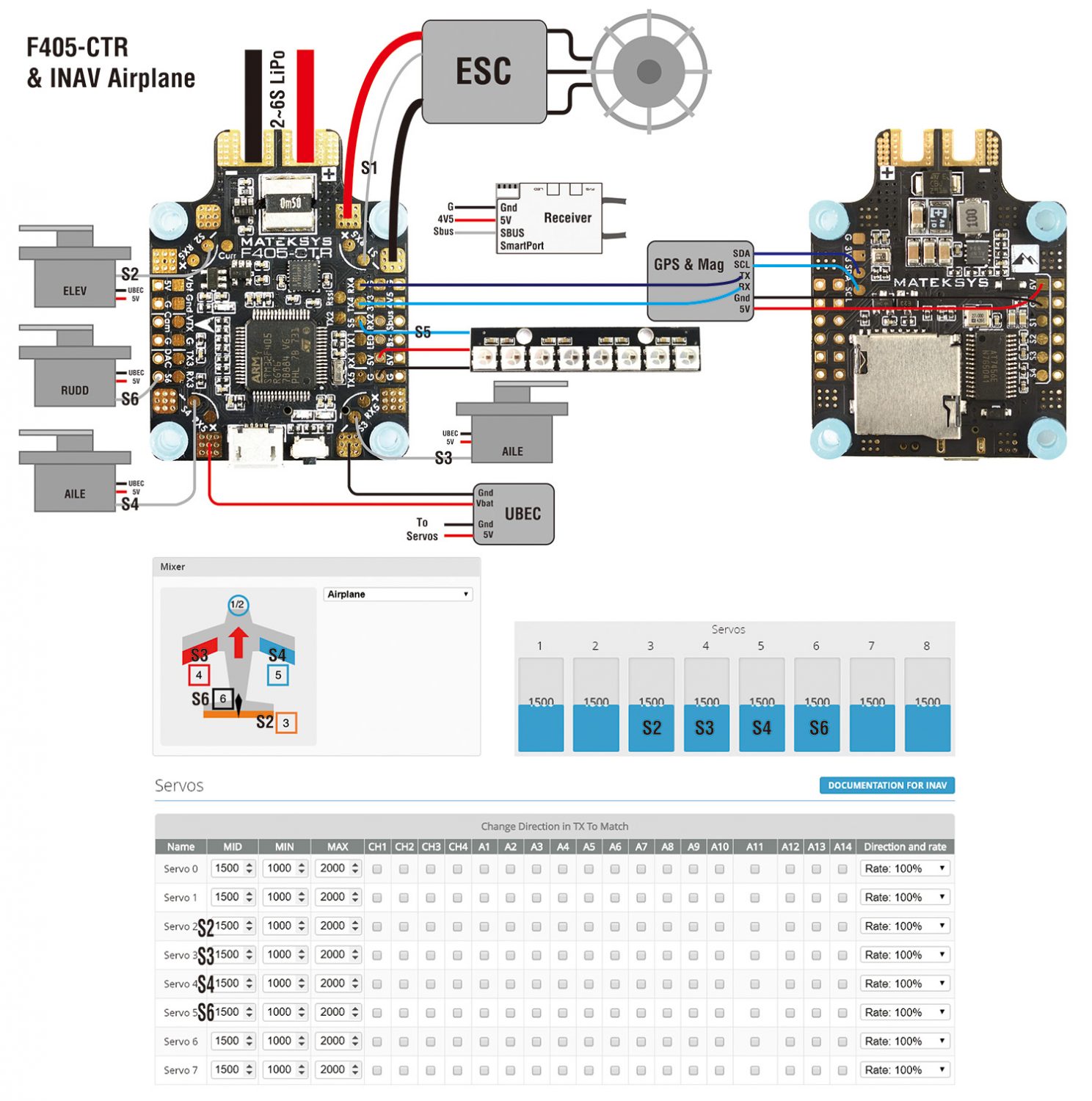
INAV Wiring:
Подскажите приемник frsky d4r-ii 4ch можно подключить к Matek F405 CTR по PPM?
Я так понимаю в режиме РРМ у данного приемника 8 каналов.
hobbyking.com/media/file/736633136X172282X46.pdf
И чем отличается СРРМ от РРМ?

frsky d4r-ii можно смело подключать по CPPM. (см. 1.3 пункт 3)
Прошу подсказки.
Подключаю к ПК регуль 4 в 1, на последнем есть следующие выводы:

С моторами понятно, а с остальным…
GND и VCC это вход питания регуля? Или он берет с силовых площадок?
5V это выход, как я понял. По идее не нужен.
Current. Это ток чего? Нужно ли этот вывод подключать вот на этот контакт:

Вход питания регуля - это больше площадки слева.
GND и 5V выход питания для полетного контроллера он вам не нужен (ПК имеет собственный BEC и умеет самостоятельно питаться от батареи).
VCC - напряжение батареи на полетный контроллер (для телеметрии) - он вам не нужен (ПК имеет собственный BEC и умеет работать с прямым напряжением от батареи).
Current - выход датчика тока судя по описанию регуля -он вам не нужен (ПК имеет собственный датчик тока).
Current - выход датчика тока судя по описанию регуля -он вам не нужен (ПК имеет собственный датчик тока).
он был бы не нужен, если бы автор вопроса запитывал регуляторы/моторы непосредственно с полетника, а у него так не получится.
Прошу подсказки.
смотрите, ваш полетник имеет встроенный датчик тока.
ваш регуль тоже имеет датчик тока.
очевидно в вашем варианте вы батарею будете подключать к регулятору, откуда возьмете:
- VCC и GND (можно с разъема, а можно прямо с пятаков питания регулятора, пробросив два проводка-мостика) на пятаки питания полетника, дальше вы сразу получите напряжение на OSD.
- 5V с регуля вам не нужно, полетник запитается напрямую от п.1.
- а вот датчик тока, который на регуляторе и который будет иметь данные по току с регуляторов\моторов вам нужно будет накинуть на пятак Curr полетника. Иначе вы данные по току будете получать только с встроенного в полетник датчика, а он будет отображать только потребление полетника и периферии, которую вы к полетнику запитаете… потребления моторов он не увидит…
ЗЫ: все же этот полетник под раздельные регули больше подходит.
если бы автор вопроса запитывал регуляторы/моторы непосредственно с полетника
Судя по толстым аудиопроводам, припаянным к полетнику, так и есть… Соответственно, Константин прав. В такой схеме на регуль нужно подать только косичку из GND и motor1-4
Судя по толстым аудиопроводам, припаянным к полетнику, так и есть… Соответственно, Константин прав.
можно в теории подать на полетник питание с батареи, затем от полетника с площадок ESC кинуть четыре толстых плюсовых провода на (или один если медь внутри полетника потянет) “+” питания ESC и один тоненький минусовой с “-” питания полетника на “-” питания ESC. Тогда датчик тока полетника покажет все )) но это же колхозище!!! вы это чтоль рекомендуете?