Полетные контроллеры Matek Systems

на моем проводков больше, шесть
Ну, тогда нормально.
Стоил 35 долларов
Есть большая вероятность, что там настоящий Юблокс и настоящий 883 компас, а то в дешевые что только не пихают…)
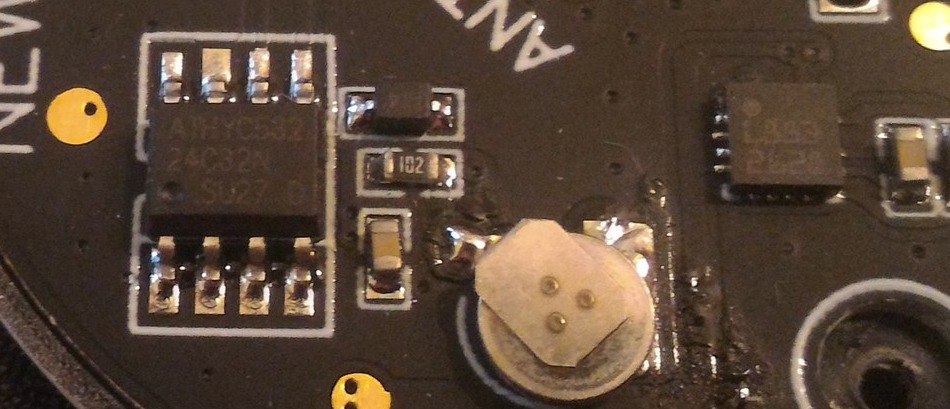
Если не лень, снимите крышку и сфоткайте плату, пригодится кому нибудь…)

снимите крышку
Тэк-с…
Вот.

Год на плате смущает)) Что-то древнее, как овно мамонта, наверное)


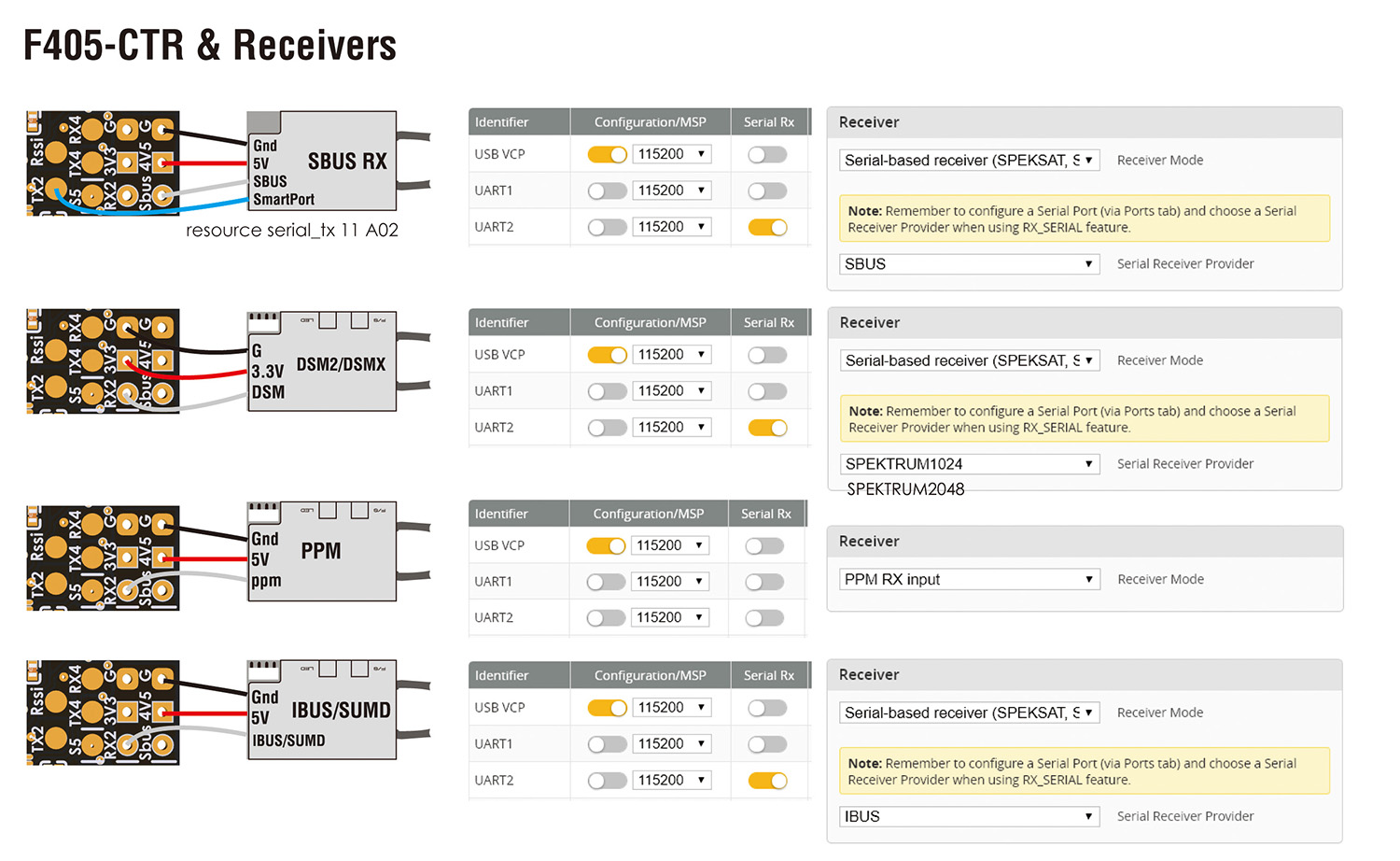
Скажите пожалуйста к контролеру Matek F405 CTR приемник по PWM можно подключить?
Если да то не могли бы сказать куда припаивать провода?
…приемник по PWM можно подключить?
… куда припаивать провода?

Вот.
Компас настоящий… А вот батарейку опять рядом с компасом влепили…)
В общем, модуль неплохой, сравнимый с BN-880, за исключением того, что у 880 антенна активная.
Только что-то не могу его запустить в конфигураторе.
В портах выбираете ЖПС на нужном порту и скорость 115200 делаете Сэйв/Ребут. В кофигурации включаете галочку Жпс, опять сэйв/ребут…
Только ЖПС/компас не будут работать без батарейки, от ЮСБ туда 5 вольт не идет.
Не запоминает он порты. И галочка постоянно сбрасывается после ребута. Питание внешнее подано.
Я олень. Разобрался. Слайдер напротив порта двигать не надо было, просто выбрать GPS. Пля, темный лес…

Доброе время суток! Подскажите новичку. Как правильно подключить зуммер(пищалку) два провода к контролеру Matek F405 CTR ? Есть опасение что может выгореть порт.

Доброе время суток! Подскажите новичку. Как правильно подключить зуммер(пищалку) два провода к контролеру Matek F405 CTR ? Есть опасение что может выгореть порт.
если это обычная 5в активная пищалка, то двумя проводами: просто “+” пищалки к “5V” полетника, а “-” пищадки к “Bz-” полетника.

Если это, скажем, пищалка матек, то тремя проводами: “5V” пищалки к “5V” полетника, “G” пищалки к “G” полетника, а “B-” пищалки к “Bz-” полетника.

Андрей огромное спасибо. Пищалка 2 контактная как на 1 фото. Просто было опасение что порт не выдержит.
Спеки Matek F405-CTR, дабы далеко не ходить… А если ходить, то туда: www.mateksys.com/?portfolio=f405-ctr
FC Specifications
MCU: 168MHz STM32F405
IMU: MPU6000 accelerometer/gyro (SPI)
Baro: BMP280 (I2C)
OSD: BetaFlight OSD w/ AT7456E chip
Blackbox: MicroSD card slot (SD/SDHC)
VCP, UART1, UART2, UART3, UART4, UART5
Built in inverter for SBUS input (UART2-RX)
PPM/UART Shared: UART2-RX
SoftSerial on TX2, S5 or S6 optional
Camera control on S6 or DAC optional
Smartaudio & Tramp VTX protocol supported
WS2812 Led Strip : Yes
Beeper : Yes
RSSI: Yes
PDB Specifications
Input: 6~30V (3~6S LiPo) w/TVS protection
PDB: 4x30A (Max.4x46A), 6 layers*2oz copper PCB
BEC: 5V 2A cont. (Max.3A)
LDO 3.3V: Max.300mA for Spektrum RX
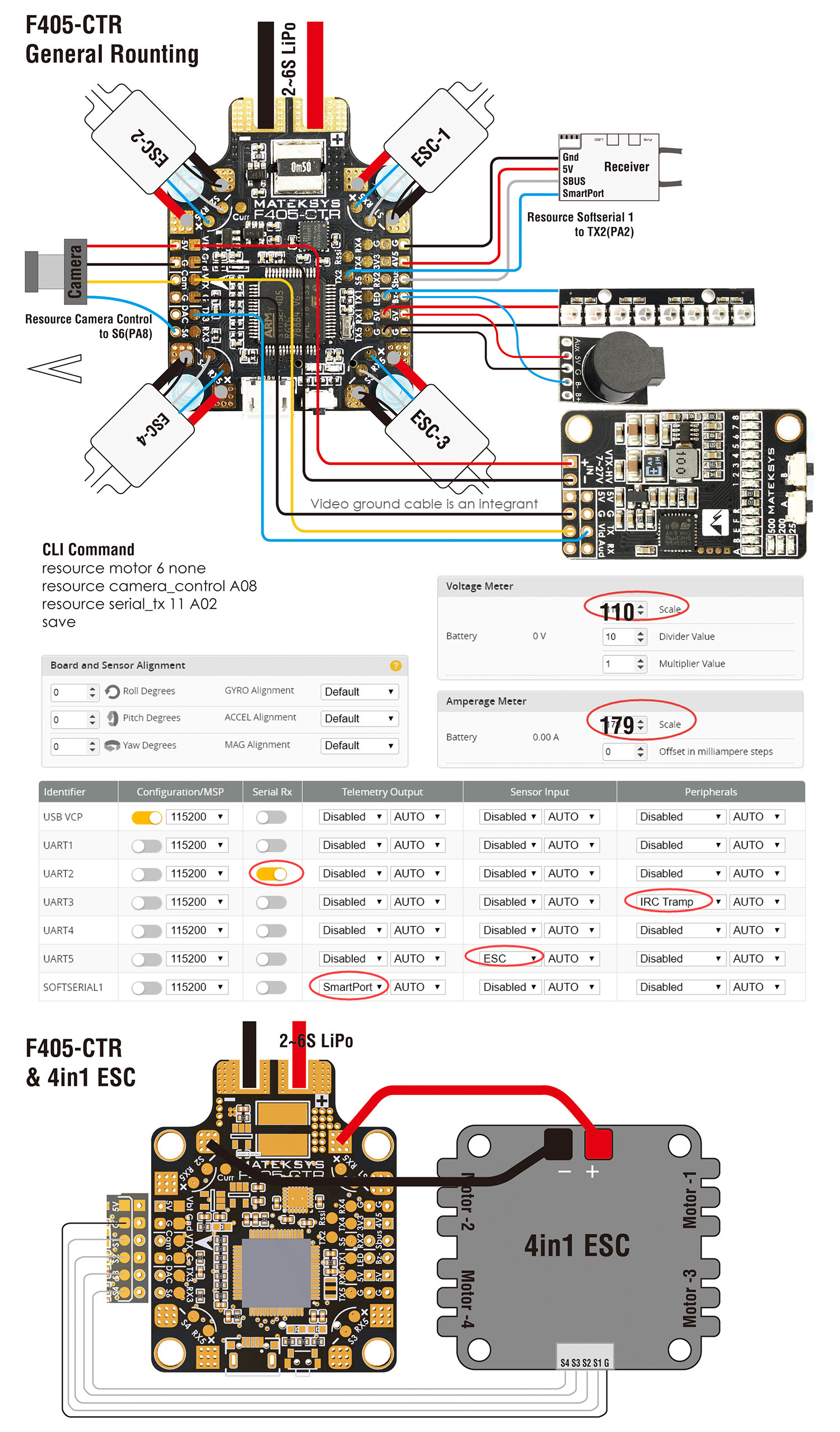
Current Sensor 184A (Scale 179)
Battery Voltage Sensor: 1:10 (Scale 110)
3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
6x PWM / DShot outputs without conflict
5x UARTs
1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
4x pairs of corner pads for ESC Signal/GND connections (DSHOT compatible)
1x pair I2C1 pads
1x Side-press button for BOOT(DFU) mode
36x46mm PCB with 30.5mm mounting holes
10g
BF pins definition:
Pad/Hole PIN TIM Resource option
PPM PA3 TIM5_CH4
S1 PC6 TIM3_CH1
S2 PC7 TIM8_CH2
S3 PC8 TIM8_CH3
S4 PC9 TIM8_CH4
S5 PA15 TIM2_CH1 LED_STRIP, serial_tx 11
S6 PA8 TIM1_CH1 camera_control
2812 LED Strip PB6 TIM4_CH1
TX4 PA0 TIM5_CH1 serial_tx 12 (BF3.2.3)
RX4 PA1 TIM5_CH2 serial_rx 12 (BF3.2.3)
TX2 PA2 TIM9_CH1 serial_tx 11 (BF3.2.3)
DAC PA4 camera_control (BF3.3)
S5 (PA15) or TX2 (PA2) can be resourced to softserial for Frsky SmartPort
2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro.
2812LED can be resourced to S5 (PA15) if using Baro the same time with BF firmware
S6 pad (PA8) can be resourced to Camera Control
CLI commandresource motor 5 none
resource led_strip 1 A15
resource motor 6 none
resource camera_control A08
resource serial_tx 11 A02
save
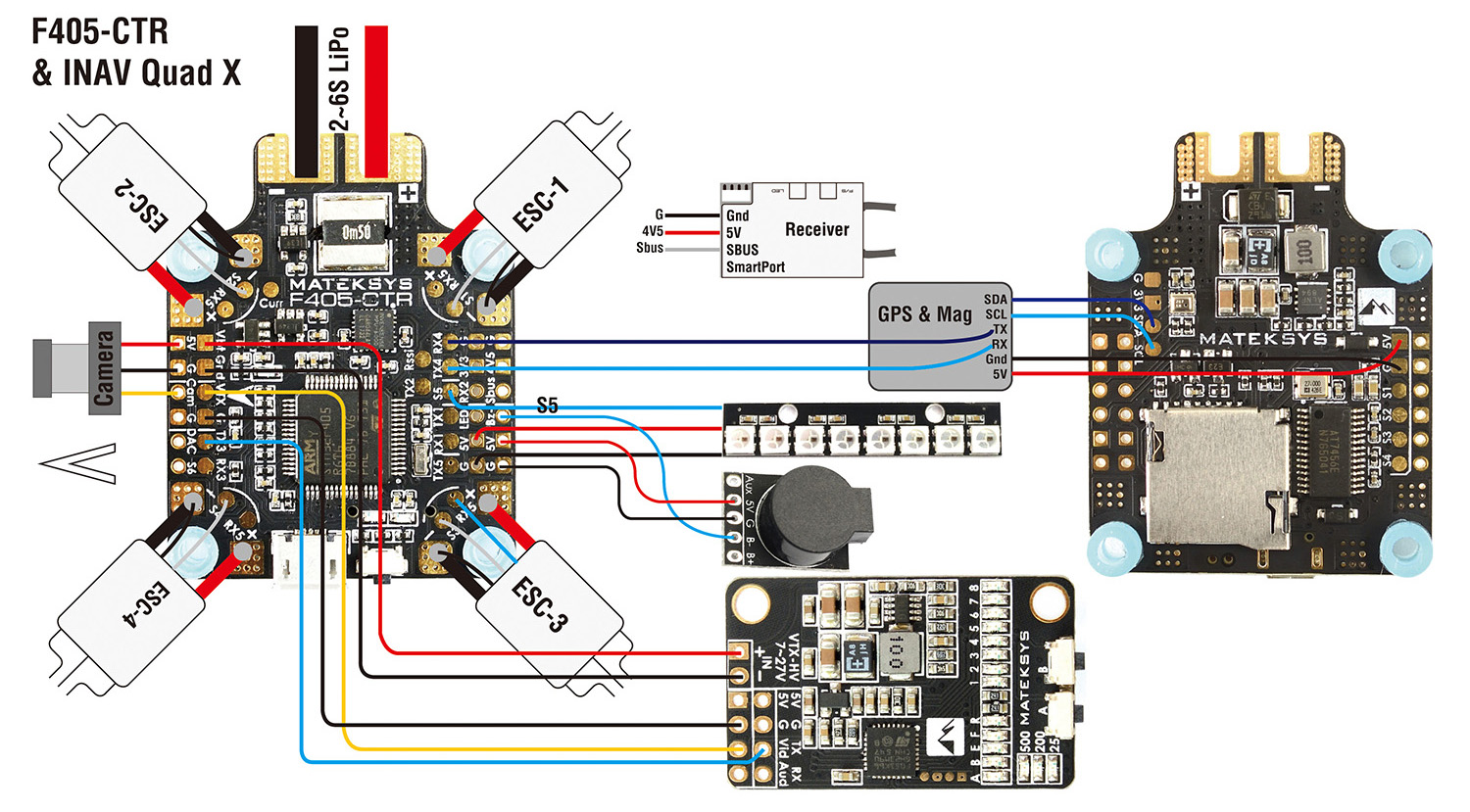
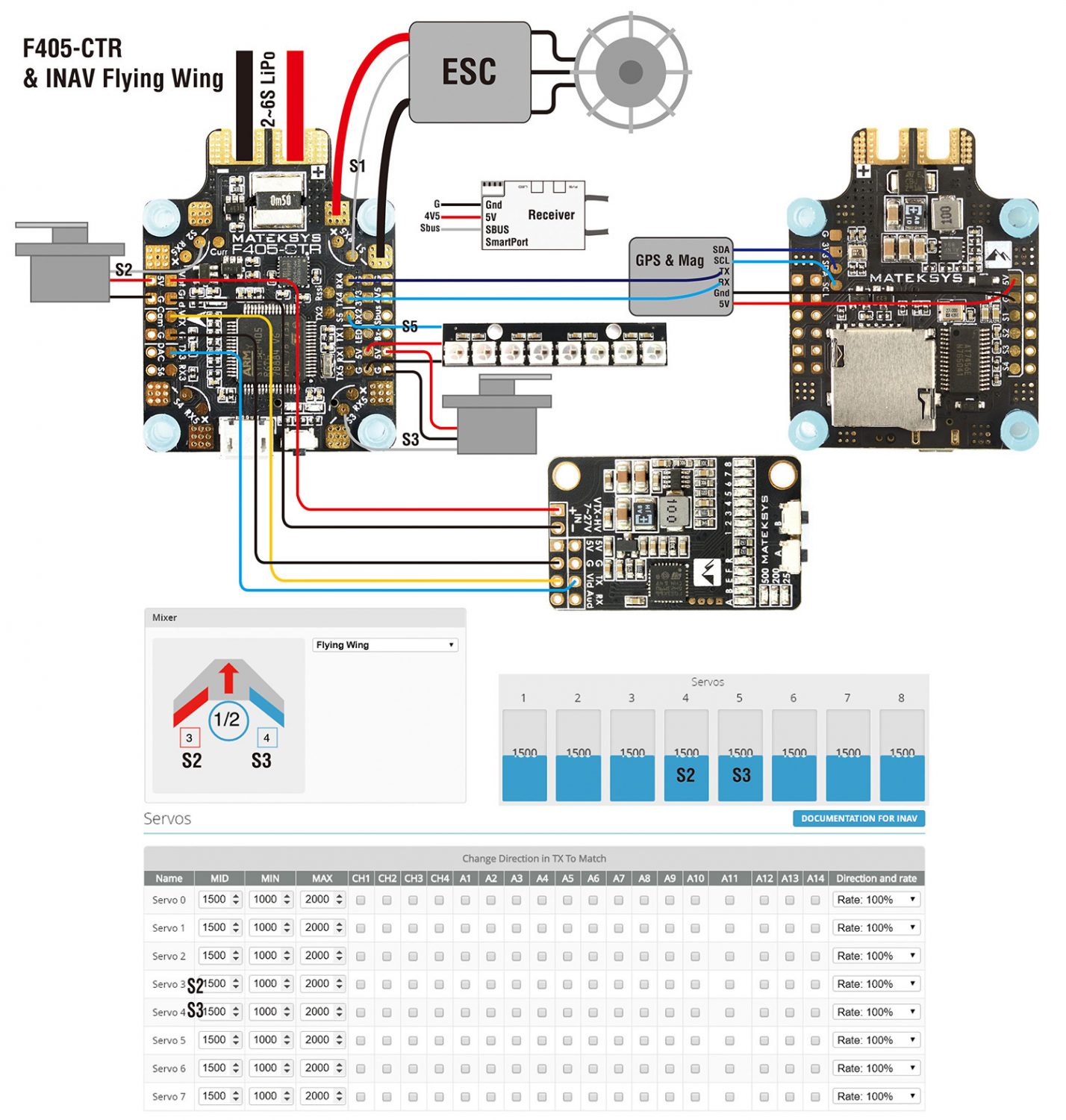
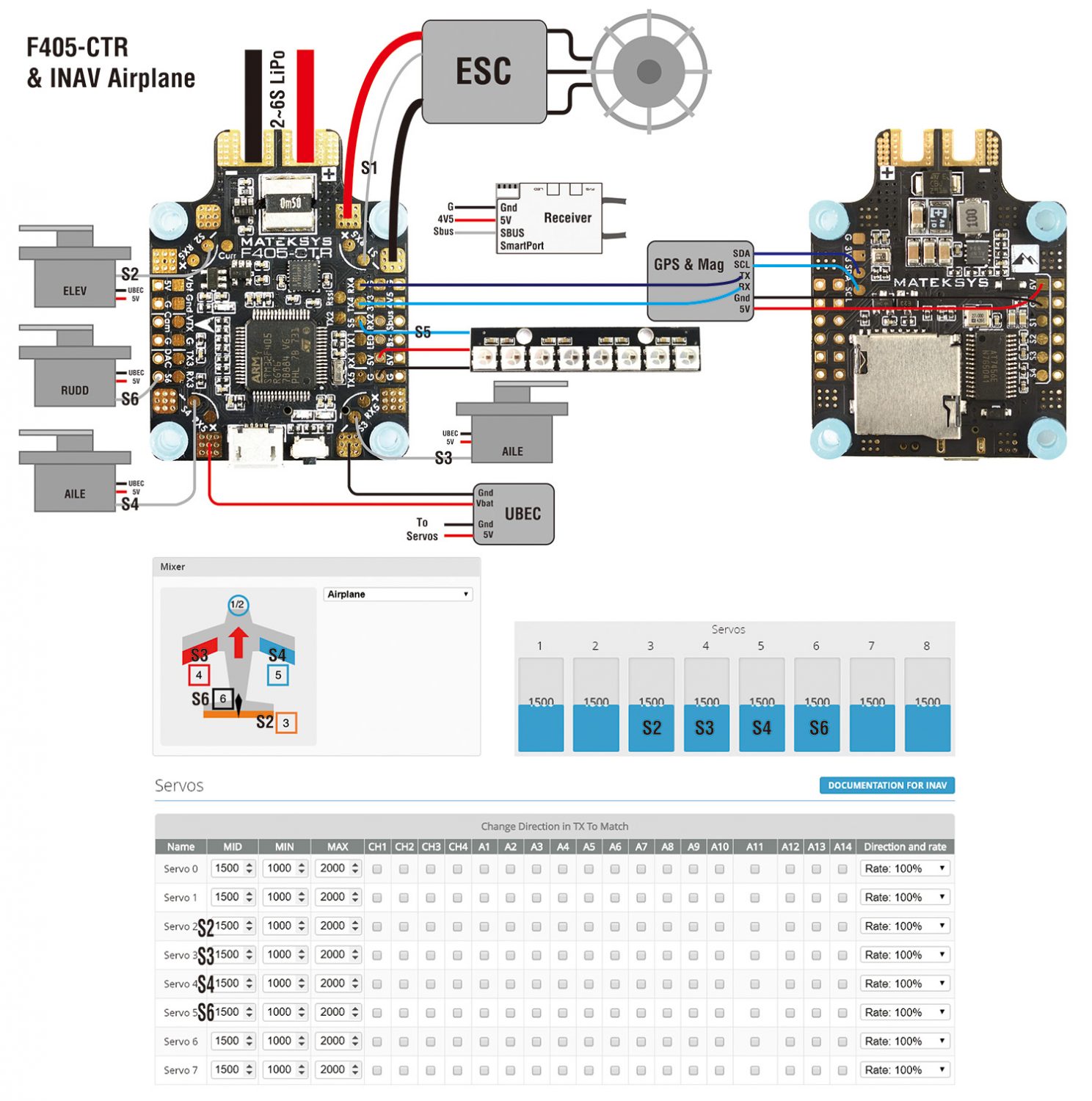
INAV Wiring:
Подскажите приемник frsky d4r-ii 4ch можно подключить к Matek F405 CTR по PPM?
Я так понимаю в режиме РРМ у данного приемника 8 каналов.
hobbyking.com/media/file/736633136X172282X46.pdf
И чем отличается СРРМ от РРМ?

frsky d4r-ii можно смело подключать по CPPM. (см. 1.3 пункт 3)
Прошу подсказки.
Подключаю к ПК регуль 4 в 1, на последнем есть следующие выводы:

С моторами понятно, а с остальным…
GND и VCC это вход питания регуля? Или он берет с силовых площадок?
5V это выход, как я понял. По идее не нужен.
Current. Это ток чего? Нужно ли этот вывод подключать вот на этот контакт:

Вход питания регуля - это больше площадки слева.
GND и 5V выход питания для полетного контроллера он вам не нужен (ПК имеет собственный BEC и умеет самостоятельно питаться от батареи).
VCC - напряжение батареи на полетный контроллер (для телеметрии) - он вам не нужен (ПК имеет собственный BEC и умеет работать с прямым напряжением от батареи).
Current - выход датчика тока судя по описанию регуля -он вам не нужен (ПК имеет собственный датчик тока).
Current - выход датчика тока судя по описанию регуля -он вам не нужен (ПК имеет собственный датчик тока).
он был бы не нужен, если бы автор вопроса запитывал регуляторы/моторы непосредственно с полетника, а у него так не получится.
Прошу подсказки.
смотрите, ваш полетник имеет встроенный датчик тока.
ваш регуль тоже имеет датчик тока.
очевидно в вашем варианте вы батарею будете подключать к регулятору, откуда возьмете:
- VCC и GND (можно с разъема, а можно прямо с пятаков питания регулятора, пробросив два проводка-мостика) на пятаки питания полетника, дальше вы сразу получите напряжение на OSD.
- 5V с регуля вам не нужно, полетник запитается напрямую от п.1.
- а вот датчик тока, который на регуляторе и который будет иметь данные по току с регуляторов\моторов вам нужно будет накинуть на пятак Curr полетника. Иначе вы данные по току будете получать только с встроенного в полетник датчика, а он будет отображать только потребление полетника и периферии, которую вы к полетнику запитаете… потребления моторов он не увидит…
ЗЫ: все же этот полетник под раздельные регули больше подходит.
если бы автор вопроса запитывал регуляторы/моторы непосредственно с полетника
Судя по толстым аудиопроводам, припаянным к полетнику, так и есть… Соответственно, Константин прав. В такой схеме на регуль нужно подать только косичку из GND и motor1-4
Судя по толстым аудиопроводам, припаянным к полетнику, так и есть… Соответственно, Константин прав.
можно в теории подать на полетник питание с батареи, затем от полетника с площадок ESC кинуть четыре толстых плюсовых провода на (или один если медь внутри полетника потянет) “+” питания ESC и один тоненький минусовой с “-” питания полетника на “-” питания ESC. Тогда датчик тока полетника покажет все )) но это же колхозище!!! вы это чтоль рекомендуете?
Я не рекомендую…) Я смотрю на картинку автора вопроса и констатирую факт…)
Что касается моих рекомендаций, я как противник “прогресса”, за отдельные регули, желательно без наворотов.
Моя позиция заключается в том, что любой универсальный девайс это вещь компромиссная, а компромисс это “когда всем плохо”(©)
но это же колхозище!!!
Ну почему никто документацию не читает?
В документации на полетник указано, что подключение регуляторов 4in1 - стандартная фича фича (правда на другиих контактах).
www.mateksys.com/wp-content/…/F405-CTR_BF.jpg