коптер в полном автономном режиме

Видать в том, что он слегка подергивается, пытаясь работать. Зато “свой” 😃
К чему, опять, этот стёб?..
Если гимбал статичный, то электроника и софт нужны только для синхронизации камер.
Если гимбал таки держит курс и горизонт, то это много сложнее, чем вы себе представляете.
Интерестно услышать хотябы общее описание, чтоб секреты/патенты не раскрывать.
Если гимбал таки держит курс и горизонт, то это много сложнее, чем вы себе представляете. Интерестно услышать хотябы общее описание, чтоб секреты/патенты не раскрывать.
ну да. всё держит 😃
там на видео выше виден сырец с гопры.
т.к. Стас снимает один, то еще доработки чтобы было мягкое следование за курсом коптера…
ну и заюзываются все каналы 14ти канальной футабы 😃
там вообще и по софту весьма не простая схема …
ух какой маятник. я так понимаю оно только для плавных пролетов работает, на поворотах и остановках будет рыскание относительно центра коптера.
как-то решили проблему одновременного запуска камер кадр в кадр?
ух какой маятник. я так понимаю оно только для плавных пролетов работает, на поворотах и остановках будет рыскание относительно центра коптера.
как-то решили проблему одновременного запуска камер кадр в кадр?
ну труба длинная полюбасу нужна. иначе пропы лезут в кадр.
колебания гасятся софтом коптерым нормально. оно особо-то и не раскачивается сам…
нужно по-плавнее конечно летать 😃…
камеры включаются тупо по очереди. кадр-в-кадр-то всё равно не попасть. между собой гопры вроде как не синхрятся по-кадрово…
потом как-то всё сшивается. я в эту тему не погружался…
как мысли - синхрить можно по звуку например…
по-быстренькому накидал тут стенд и дописал софтину свою для тестов ВМГ 😃
по-быстренькому накидал тут стенд и дописал софтину свою для тестов ВМГ 😃
Виктор, софтина супер, но фото стенда тоже охота увидеть.
да, было бы интересно не только увидеть стенд но и иметь возможность повторить…
и мотор 5010 с 17дюймовым винтом интересно что за зверь такой
дающий эффективность под 20 грамм на ватт…
У меня дежавю или было что то похожее с автопилотом?
Виктор, софтина супер, но фото стенда тоже охота увидеть.
да смотреть там особо нечего 😃
без слёз не взглянуть… сболтил по-быстрому из обрезков, что под рукой были…
надеюсь, что кто-ть сделает стенд нормального вида и к нему уже спец платку можно будет развести.
в принципе день работы-то…
да, было бы интересно не только увидеть стенд но и иметь возможность повторить…
и мотор 5010 с 17дюймовым винтом интересно что за зверь такой
дающий эффективность под 20 грамм на ватт…
да пробовал разные намотки 😃. эта с кв около 200 кажись… и на оч мелком напряжении для этого кв…
а так у стокового моторки подобного плана цифорки:
d.asta.cc/acMotorTest-[RC5010-360kV]-[17x5]-[14.8 …
У меня дежавю или было что то похожее с автопилотом?
о. опять человече с Питера и “с любовью” 😃
-------------
кстати, если стоковый мотор крутануть 9ю вольтАми - так уже около того же и получим:
copterworks.ru/download/file.php?id=118&mode=view
о. опять человече с Питера и “с любовью”
Я про “Top Secret” Вашего автопилота и про возможность воспользоваться софтом и хардом (не о алюминии) для постройки стенда.
кстати, заметил:
- при питалове напрямую от батарейки цифры лучше 😃, чем если питать от БП, хотя и провода от БП толстенные и падение напряжения за тест символическое (< 0.1V)…
причем на мелкой тяге цифры так вообще волшебные могут быть при питании от баты.
и под 23 грамм-на-ватт наблюдается 😃 (при ~100 грамм тяги) - так же цифры разные от динамики “подачи”…
- хобийные регули выдают цифры меньше, чем свой с цифрами 20kHz, тайминг 10 (угол опережения)
- что симонка прошивка что хоббивинговская обычная - особой разницы нет
- пропы что на фото-говно по живучести 😃. через некоторое время расслаиваются на нагрузке…
Я про “Top Secret” Вашего автопилота и про возможность воспользоваться софтом и хардом (не о алюминии) для постройки стенда.
ну тут-то проще всё 😃
хотя вот для стенда заюзал валяющуюся неудачную версию платки (5.0), в которой была уйма ошибок, и летать на ней проблематично
можно сделать прошивку для PixHawk, например, или еще какой-ть платки… не понятно только кому это нужно 😃…
не понятно только кому это нужно …
Думаю спрос есть, любителей выпиливать молоток из наковальни, всё меньше и меньше,
а соединять кубики, напротив, многие не против.
Тропа пионера узка и терниста!😇
кстати, если стоковый мотор крутануть 9ю вольтАми - так уже около того же и получим:
у всех есть зависимость вида

по X напряжение по Z гр\Вт по Y тяга.
с уменьшением напряжения растет эффективность, но падает диапозон тяг. можно варьировать kv и напряжением питания так что диапозон по тяге совпадет, тогда и график эффективности может совпасть (при совпадении условий)
- хобийные регули выдают цифры меньше, чем свой с цифрами 20kHz, тайминг 10 (угол опережения)
некоторые регуляторы сами по себе едят столько энергии что в точке 100гр ±3гр\Вт не редкость. собственно 5010 360kv с этим пропеллером в точке 100гр на напряжении 11.1В ест около 0.38 А. Я знаю регуляторы которые на этом напряжение кушают от 0.01А до 0.1А то есть может быть суммарное потребление и 0.39 и 0.48 у вас с этим как? и какой вес?
- пропы что на фото-говно по живучести . через некоторое время расслаиваются на нагрузке…
а еще у них проблемы с повторяемостью геометрии. в одной парти разброс от самого эффективного до худшего может составлять 1-2гр\Вт механической мощности…
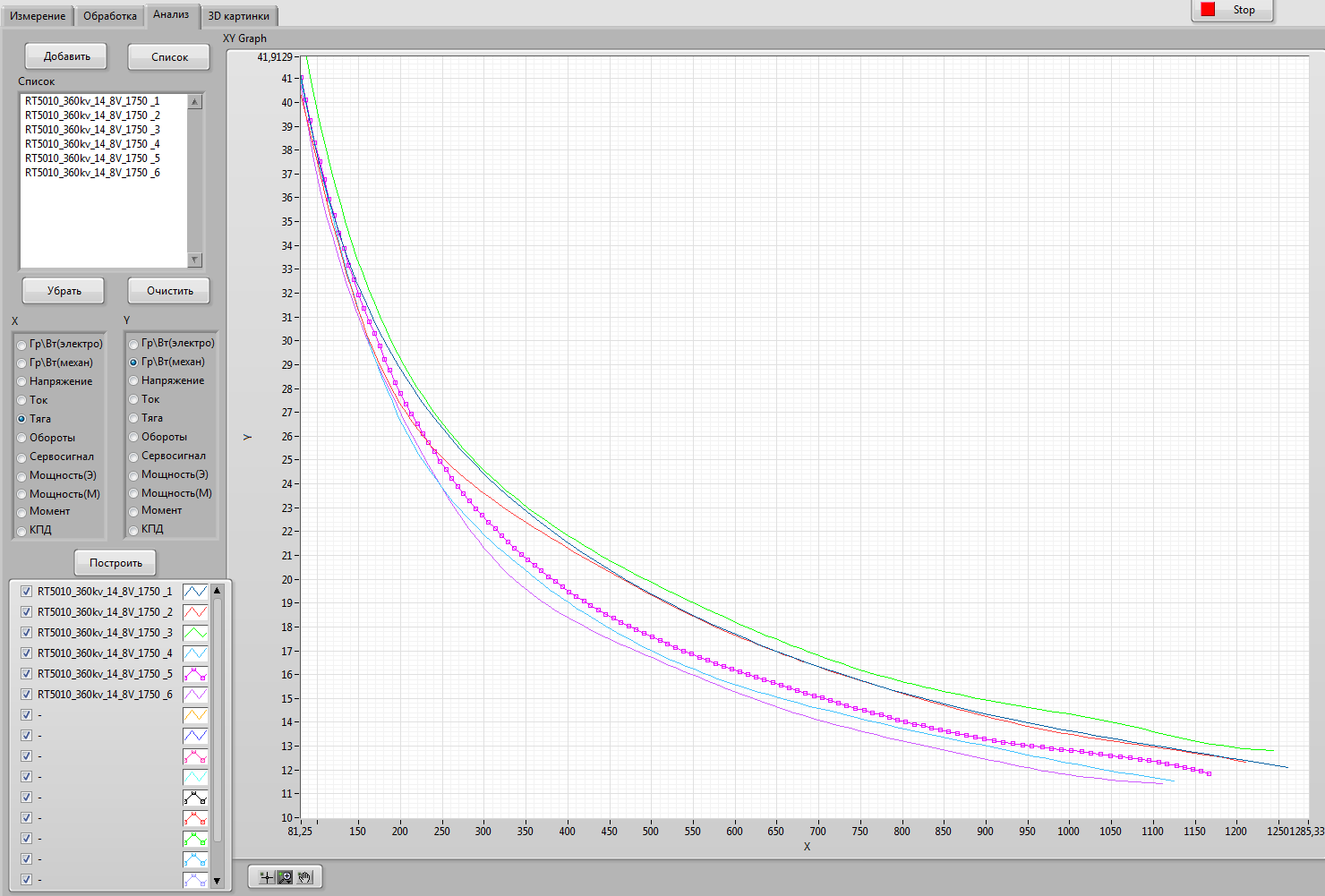
причем на картинке разброс до 3х эт следствие не подходящих условий работы при нехватке воздушного пространства. в которой у меня наблюдалась четкая разница по тяге для больших пропеллеров разного направления вращения… см окончание тяг на графике для разных кривых.
а есть еще куча факторов влияющих на результат. изза которых так сложно верить цифрам.
на гимбале хитром для гопрошек тоже моя электроника и софт
Виктор, только что увидел, с возвращением! А вот про гимбал хитрый спрошу-механика на вертолетной тарелке собрана? Чота рылся,а нигде не нашел…
Виктор, только что увидел, с возвращением! А вот про гимбал хитрый спрошу-механика на вертолетной тарелке собрана? Чота рылся,а нигде не нашел…
фото: aero-scan.ru/…/10733453_349104378597255_2398765889…
тут во всей красе 😃
можно сделать прошивку для PixHawk, например, или еще какой-ть платки… не понятно только кому это нужно …
Ну так Виктор, вроде ж понятно что надо, многим. Но нужна внятная цена(не как для вояк😁), описание возможностей, инструкция, и какой то объем гарантированной техподдержки. Сделайте, и покупатели найдутся.
описание возможностей, инструкция, и какой то объем гарантированной техподдержки.
Эта работа не сложная, но требует много времени и стимула, успешные авторы не хотят размениваться на мелочи к которым у них интерес заканчивается после первых “вау”.
На самом деле главный вопрос не “кому это надо?”, а нужен ли этот геморой Вам, пусть и за деньги?
про измерение эффективности вообще правильнее было бы при испытаниях вмг
14 гр/вт на 550 граммах выглядит весьма неплохо.
напрашивается мысль отсчет эффективности вести от точки когда винт+мотор начинают поднимать хотябы свой вес.
иначе эта оценка не с точки зрения коптеров а с точки зрения воздушных насосов.
полетные контроллеры жалко на стенд тратить
у стм весьма дешевы дискавери платки (порядка 1000р с учетом подорожания)
www.terraelectronica.ru/catalog.php?ID=582&search=…
если проект выложить как опенсоурц то поддерживать ненужно и поучиться есть на чем
а если платка с акселем то есть и куда расти- например дописать измеритель вибраций
а нужен ли этот геморой Вам, пусть и за деньги?
При четко сформулированной задачи, далее возможностей конечного продукта, наличия спонсоров и анализа спроса на конечный продукт (если он востребован при своей конечной стоимости) все получится
фото: aero-scan.ru/…/10733453_349104378597255_2398765889…
тут во всей красе 😃
Ух ты,крута!
А мне кааца, был бы очень востребован похожий продукт под 3 или 4 гопрохи для спортивных съемок типа рейсингов всяких,да и под архитектуру с пейзажами тоже полезно было бы.
Вопчем тема сисек не раскрыта в этом подвесе,есть куда раскудрявить:)