Walkera QR Y100 5.8ghz fpv hexacopter

ipetrov, Сергей, а можно подробнее рассказать про то, как “расколдовать” камеру? начиная с момента использования софта… RX и TX распаял, кабель на PL2303 есть, далее как действовать, желательно подробнее со ссылками…
Цепляйте кабель к TX/RX и землю, смотрите появился ли вывод с консоли при подключении питания (должна быть стандартная загрузка OpenWRT), если есть значит TX точно подцепили верно 😃 После завершения загрузки жмите ввод, если появилось стандартное приглашение рут линукса значит RX тож работает. У меня на PL2303 сразу не полетело, пришлось резать дорожку, возможно на другом чипе USB-TTL хватило бы уровней для работы, хз.
Как только получите рут уже можете менять настройки MJPG-streamer на свое усмотрение, выше уже говорил что удалось выяснить по характеристикам камеры. Сама софтина стримера опенсорсная, в сети есть документация со всеми параметрами, там много всего можно крутить.
Много полезной инфы есть на сайтах по OpenWRT, у нас электроника камеры по сути тот же роутер с припаянной в USB порт камерой 😃
Как только получите рут уже можете менять настройки MJPG-streamer на свое усмотрение…
И вот тут начался упс… У меня на компе Винда стоит, ХРюша. Если загружусь с флешки в Linux (Slax называется) получится всё вышеизложенное?
нее, рут вы получите не на своем компе, а на коптере 😃 вы вывод консоли при подключении питания на коптере видите в PUTTY ?
При подключении к компу - ничего не происходит. Перерезал вышеуказанную дорожку, результат нулевой… Решил оставить я это дело, не мучаться. Всё равно мне из Чины идёт комплект передатчик с камерой.
Перерезал вышеуказанную дорожку, результат нулевой… Решил оставить я это дело, не мучаться. Всё равно мне из Чины идёт комплект передатчик с камерой.
Дорожку нужно резать для того чтобы RX заработал (можно было вводить команды), для вывода сообщений консоли нужен только TX.
PL2303 как подключали к коптеру? RX адаптера должен быть на TX коптера и наоборот, обязательно земля.
RX адаптера должен быть на TX коптера и наоборот
Это почему так? Я кройкой и “шитьём” занимаюсь давно (правда в основном микроконтроллеры и моб телефоны), так вот там пин в пин. RX-RX, TX-TX ну и землю конечно. Кабель у меня для прошивки стареньких аппаратов Siemens переделанный.
Это почему так?
Какая у вас распиновка на кабеле сложно понять, но на обычном USB-TTL адаптере за доллар с ибея TX пин это передача, должна быть подключена к RX пину (прием) на устройстве и наоборот.
В любом случае поменять пины местами дело одной минуты:)
Про скорость и параметры UART порта тоже не забывайте, выставляйте правильно.

Спасибо, но я уже забил на это дело. Не особо нужно было, просто так, ради спортивного интереса хотел попробовать. Камера все равно дома лежит без дела.
В дополнение про барометр (у нас стоит MS5611-01BA03, работает на I2C шине) - после отключения проблема с “ватным” газом никуда не исчезла. Очевидно что проблема именно в прошивке, что там накрутили китайцы можно только гадать…
Н-да, заморочек с сием аппаратом мля просто вал. Купил себе крепление смартфона на пульт Devo4, два новых аккума, пришел и USB-TTL, хотел я было настроить разрешение по-больше и продать аппарат, как на тебе ни с того, ни с сего вырубается один из движков. Теперь видимо придется заказывать еще парочку разношерстных движков, чтоб на всякий случай и отдавать его в хорошие руки совсем за копейки. Ну Walkera, толком-то и не летал совсем, а движке каюк и всё это за такие бабосы. Помучаю пока камеру.
Коптер на самом деле по формату вполне интересный, еще бы китайцы думали немного головой когда конструировали все это, было бы здорово.
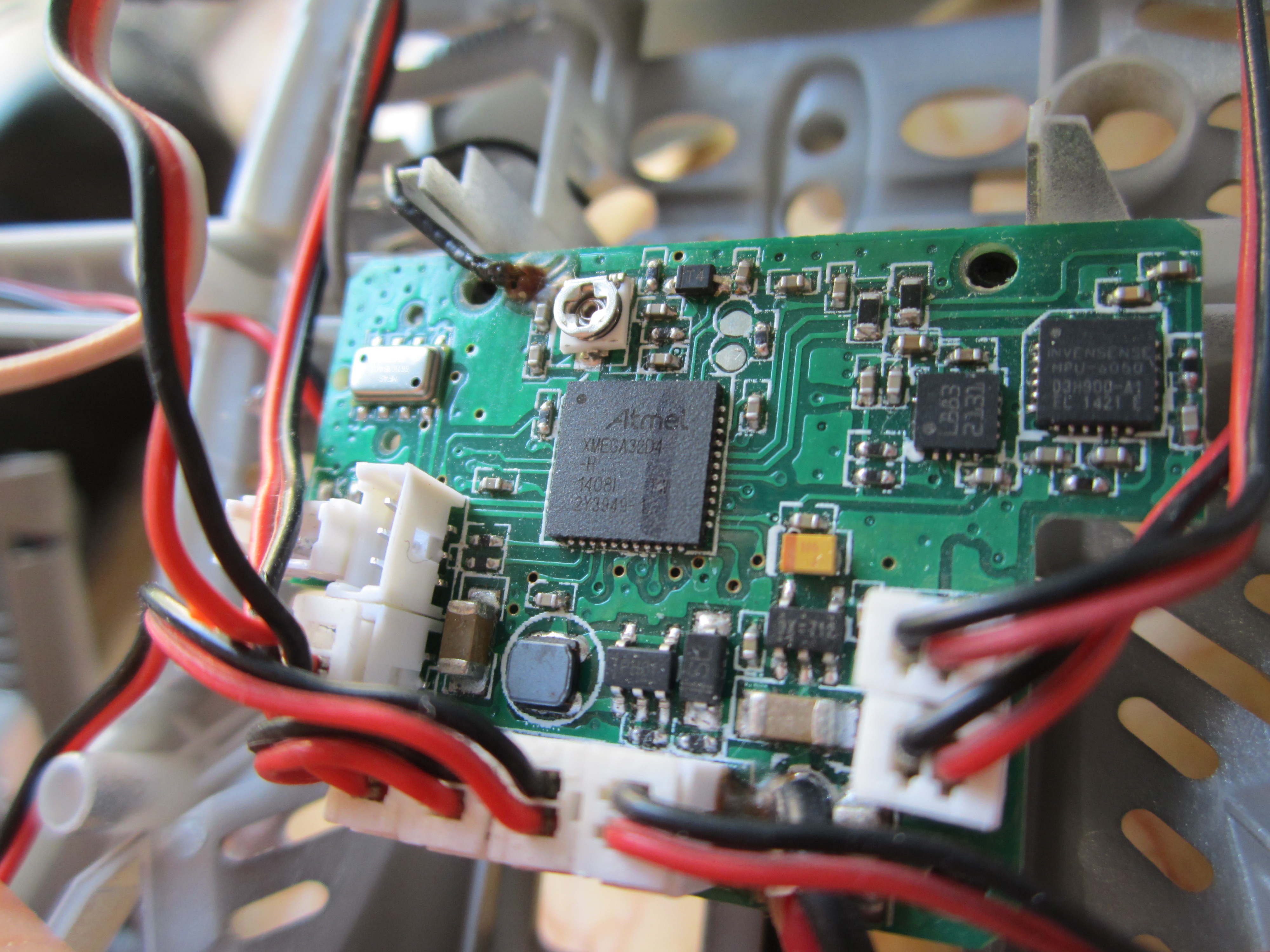
Кто мешал выложить прошивки в свободный доступ? Отключить там барометр и настроить газ дело не сложное. В чем была проблема использовать в полетном контроллере копетра Arduino совместимый МК, типа ATMEGA32U4 ? тогда можно было бы залить вообще опенсорсную прошивку Arducopter и крутить уже все под себя сколько угодно.
При этом остальные компоненты (МК XMEGA32D4, барометр MS5611-01BA03, гироскоп+акселерометр mpu-6050, компас HMC5883L
) на контроллере использованы вполне качественные и популярные, вообщем загадка…
Walkera QR Y100 у меня появилась проблема. С начало у гексы начал плохо прокручиваться двигатель. После его разбора он стал работать как надо. Но возникла другая проблема. При подключение этого двигателя гекса перестала взлетать. После её разбора и сборки снова, аппаратура не захотела обнаруживать гексу и постоянно пищит и моргает красный индикатор на пульте. У кого какие соображения? Ссылки на мой контакт. Показано как Я её запускаю.
vk.com/video?section=all&z=video283915031_17120187…
У кого какие соображения?
Случаем не батарейки ли в пульте разряжены, попробуйте заменить.
Кстати по поводу движков, с начала у меня аппарат начинало кренить и я заметил, что один мотор раскручивается чуть позже и останавливается чуть раньше других, в общем его начало подклинивать и в итоге он вышел из строя. Видимо этого говорит о скором выходе двигателя из строя.
Кстати один-то разок прогулял его по улице, правда вот видео на встроенную камеру не получилось, хотел его сравнить с видео снятое камерой MJX C4002, такое же будет Г… будет или чуток по-лучше, т. к. у камеры на гексе хоть автофокус мается.
В титрах допустил ошибку, но менять уже ничего не стал, поэтому не обращайте внимания.
Кстати один-то разок прогулял его по улице
С улицей у гексы плохо, при любом падении попадает песок в шестеренки и все, прилетели. Помимо этого корпус от любого краша трескается.
В безветренную погоду летать вроде можно, газ - это понятно, газ можно смело назвать “тормозом”. И еще, с новыми аккумами были проседания и причем солидные, висел он у меня в метрах 4-х над землей и вдруг просадка аккума и он резко теряет высоту метра 3, затем я ему газ в полную, он вроде как взмывать, но тут еще одна просадочка. Внешне похоже на просадку аккума, но с какой бы стати, такое у меня было и на родном аккуме, но тогда я был уверен, что это его износ виноват, а сейчас мне кажется, что не аккум виноват, а что-то в контроллере или в самой схеме китаесы намутили.
Небольшой ветер гекса вполне переносит, единственная проблема это отключение движков когда угол наклона более 45 градусов. Заявлено это как фича, но реально неудобно, порыв ветра и коптер вырубается и падает. Намудрили конечно китайцы с прошивкой мощно, все такие фичи должны управляться с пульта как минимум.
Еще жутко бесит что сапорт у валькиры отсутствует как класс, вот как транслировать проблемы/хотелки производителю? я нашел какой-то email, но никто по нему мне так и не ответил…
Народ в итоге придумал как модифицировать прошивку приемника для Walkera, подробнее здесь - www.min.at/prinz/?x=entry:entry140107-181200
Единственный момент - нужна какая-то оригинальная прошивка для нашего приемника, есть у кого-то нужный файл?
Walkera QR Y100 у меня появилась проблема. … аппаратура не захотела обнаруживать гексу и постоянно пищит и моргает красный индикатор на пульте.
Аналогичный вариант, только у меня после выключения и включения. Общая наработка пульта не более часа, первые включения после распаковки, батареи новые но на всякий случай поменял на другой новый комплект. Вообще-то кажется такой писк был при включении когда стик газа не на нуле (внизу) но не уверен в этом. Блин, только разобрался как летает - новая проблема. Вот бы забиндить гексочку с Turnigy 9x.
Как решили эту проблему?
Может кто знает?
Буду очень рад и благодарен вашей помощи.
Итак, сегодня препарировал пульт, думал обрыв провода к потенциометру газа но блоки стиков напрямую впаяны в плату и выпаять их оттуда весьма затруднительно для меня. естер показал плохую работу потенциометра газа, стик внизу - сопротивление равно 0 ом, чуть тронул вверх - прыгает на максимум. Как понял сопротивление = 5ком да и обозначение такое -“502j-”. Что значит - “J-”?