Walkera QR-X350 Pro

мое мнение с етим режимом надо разбиратся а то у многих про улетает в китай при активации го ту хоум.
Валкера Про может улететь, если произойдет глюк ЖПС. В Ардупилоте есть настройка защиты, при глюке ЖПС или пропадании сигналов спутников, или забросе трека, можно настроить или автопосадку, или переход в удержание высоты. Ребята из Валкеры решили эту настройку отключить. Так что, меняем в настройке FS_GPS_ENABLE , Disabled на Land и вместо улета, будет автопосадка.

на аппе по умолчанию так и есть из коробки устан. холд. а когда заходишь в софт видишь совсем другую картину (показание того же rtl)
В Валкере Про настроен( или не настроен) аппаратный файлсейв средствами приемника радиоаппаратуры. Но в самом Ардупилоте есть и настройка программного файлсейва. Надо использовать только один из них.
вы прям как в корень смотрели как раз именно етот параметр смотрел в мисион планер при подключенной про. и он был выкл. я еще подумал как же так ведь в описании потеря гпрс а он отключен.
китайцы схитрили )) спосибо еще раз за разьеснения. терь понятно если файл саве настроен в софте самой вальки то аппа уже неучавствует либо наоборот
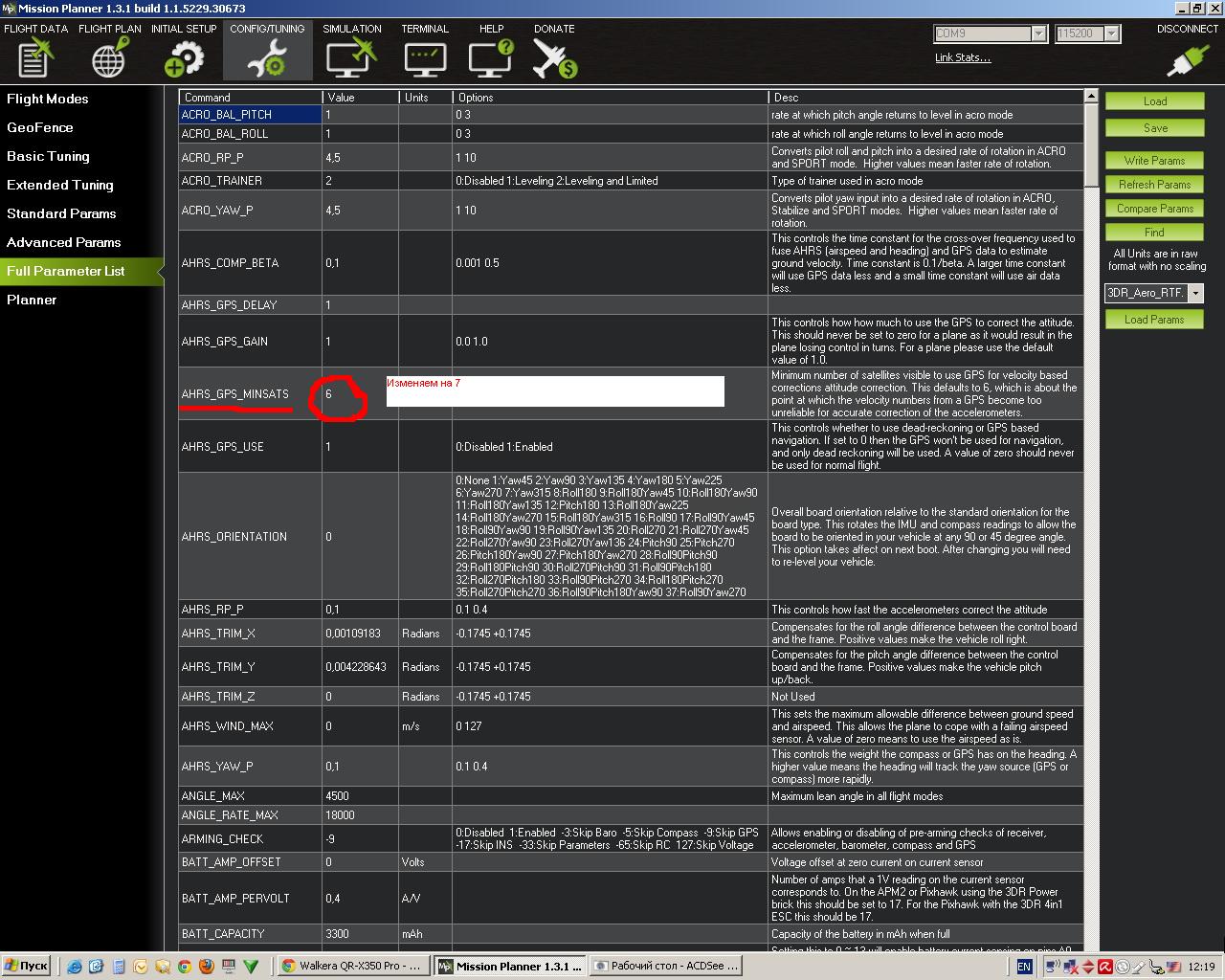
Сравнил полный лист параметров, после перепрошивки Валкеровской 1.1.
Изменилась всего одна настройка, AHRS_GPS_MINSATS. Было значение 6, стало 7.
Смысл этого параметра в следующем. Автопилот использует скорость GPS для коррекции акселерометра. При малом количестве спутников, точность определения скорости по GPS падает, начинают происходить забросы трека, и чтобы исключить рывки коптера, введен параметр минимального количества спутников, при котором коррекция активна. То бишь, после перепрошивки коррекция будет отключаться, если спутников меньше семи. А раньше отключалась, если меньше шести.
Параметр можно просто поправить в МиссионПланнере и не заморачиваться перепрошивкой через кривой софт от Валкеры, который ещё и драйвер подменяет.
А подключать коптер к компу нужно во включенном состоянии? И что ещё нужно? Поставить МиссионПланнер на комп, подключить коптер и запустить программу?
А подключать коптер к компу нужно во включенном состоянии? И что ещё нужно? Поставить МиссионПланнер на комп, подключить коптер и запустить программу?
необезательно батарейку подключать .
кстати ребята вот сылочька случайно нашел как подключать гопро камеру совместно с передатчиком boscom www.helipal.com/product_info.php?currency=HKD&prod… (не реклама)
всем привет братцы)я один раз опробовал гоу хоме он вернулся .но больше чето нехочу нет уверенности что сново все сработает.сажаю пока либо в мануале либо в жпс.
При включении ГО ХОМ надо быть готовым сразу переключиться ручной режим…заметил и вчера, что порывается улететь в конце заряда батареи…т.е. полетал мин 20 нормально, а под конец ты ему Домой а он раз и в сторону… поэтому перекурить не удастся и пульт надо держать наготове.
ты ему Домой а он раз и в сторону…
Тут два варианта, либо после подключения батареи разблокировали двигатели, не дождавшись нормального 3D GPS Fix, либо при включении RTL был плохой прием спутников, и произошел заброс точки дома. После подключения батареи, не разблокируйте моторы, пока не будут хотя-бы две вспышки правого светодиода.
Активируйте в МиссионПланнере GPS Failsafe.
Не в коем разе не плохо.
Просто Skyrc T6200 позволяет более гибко заряжать аккумы и следить и регулировать все параметры зарядки.
А можно более подробно про заряку батареи, у меня штатная заряжает час 5((((
Тут два варианта, либо после подключения батареи разблокировали двигатели, не дождавшись нормального 3D GPS Fix, либо при включении RTL был плохой прием спутников, и произошел заброс точки дома. После подключения батареи, не разблокируйте моторы, пока не будут хотя-бы две вспышки правого светодиода.
Активируйте в МиссионПланнере GPS Failsafe.
все верно Если Вы получите перевые GPS координаты уже в полете, то Ваш дом будет установлен в местоположении этих первых координат и коптер будет возвращаться в эту точку.
Тут два варианта, либо после подключения батареи разблокировали двигатели, не дождавшись нормального 3D GPS Fix, либо при включении RTL был плохой прием спутников, и произошел заброс точки дома. После подключения батареи, не разблокируйте моторы, пока не будут хотя-бы две вспышки правого светодиода.
Активируйте в МиссионПланнере GPS Failsafe.
Может быть почему ж он сразу не улетает? Скорее второе… Лучше в Миссионе ставить зависание на месте, не посадку в чужом огороде!
все верно Если Вы получите перевые GPS координаты уже в полете, то Ваш дом будет установлен в местоположении этих первых координат и коптер будет возвращаться в эту точку.
Он метит в точку где даже не летал… как правило на той же высоте.
Расскажу, какие параметры я изменил в Full Parameter List в процессе тюнинга Прошки , и что я этим добился.
WPNAV_SPEED -это скорость, с которой летит коптер при возвращении домой в RTL и во время исполнения миссии. По умолчанию 300см\сек, я установил 900. Теперь коптер домой шустро летит, а не ползет, как финский парень. В принципе, он может и 1500 лететь, но быстро жрет батарейку, да и страшновато со стороны выглядит. ИМХО 900 оптимальная скорость с точки зрения пролетаемых километров по отношению к истраченным амперам.
WPNAV_LOIT_SPEED -это максимальная скорость, с которой летит коптер при полете на нем в режиме Loiter (удержание по GPS). По умолчанию 500, я увеличил до 700.
PILOT_VELZ_MAX - максимальная скороподъемность, которую может задать пилот стиком газа при управлении коптером в режимах, использующих удержание высоты по барометру(Loiter, AltHold, Sport). По умолчанию 250, я поставил 500.
RTL_ALT -высота в см, которую наберет коптер при команде RTL прежде чем полететь домой. По умолчанию 1500 (то бишь 15 метров). Я настроил с учетом, что в местности, где я летаю есть деревья по 25 метров на 3500.
WP_YAW_BEHAVIOR - настройка, определяющая, куда направлен нос коптера при возвращении домой по RTL и при выполнении миссии. По умолчанию 2, я поставил 1 и теперь коптер летит домой развернувшись вперед носом.
зависание тоже может чревато если неоткликнется на манул сильный ветер и полетел)) а так хоть призимлится пусть и в чужой огород .надо проверять и тот режим и етот как себя про ведет в полете.
Лучше в Миссионе ставить зависание на месте, не посадку в чужом огороде!
Зависания там нет в настройках, ибо при пропадении GPS как он поймет, где ему висеть? Или посадка в чужой огород, или полет с дрейфом по ветру с удержанием высоты, пока батарея не кончится и после падение (или посадка если грамотно настроить) в чужой очень далеко расположенный огород. Что лучше?
владислав ето все в разделе full parametrs так?
Он метит в точку где даже не летал… как правило на той же высоте.
Если был заброс трека из-за плохого 3D фикса в момент разблокировки, эта точка может быть где угодно.
Зависания там нет в настройках, ибо при пропадении GPS как он поймет, где ему висеть? Или посадка в чужой огород, или полет с дрейфом по ветру с удержанием высоты, пока батарея не кончится и после падение в чужой очень далеко расположенный огород. Что лучше?
спиннинг с катушкой и цапе его обратно) ето так шутка
владислав ето все в разделе full parametrs так?
Да. И не забыть нажать Write Params после изменения настройки, чтобы она прописалась в контроллере полета.
а немогут сами движки в полете создавать помехи gps модулю?
а немогут сами движки в полете создавать помехи gps модулю?
Не могут. Модуль работает в Прошке на 5 баллов. Но сама система GPS штука не очень надежная. Да и солнечные бури на нее действуют сильно. Всегда перед полетами проверяю, и если геомагнитный шторм, на GPS не надеюсь.
А если в программе настроить при потере сигнала вместо возврата домой удержание высоты, он просто зависнет на месте и можно будет к нему подбежать с пультом и снова включить ручное управление? Как это сделать?
Возможно, чтой-то там сучьи пиндосы мутят с GPS.
Вот например:
vestnik-glonass.ru/news/tech/rosaviatsiya_soobshchaet_o_sboe_v_rabote_sistemy_gps_nad_territoriey_ukrainy/itar-tass.com/ekonomika/1155443
Совершенно верно. Пиндосы периодически над нашей страной отрубают спутники. И в прежние годы это бывало, когда серьезный GPSMAP 60CSX не мог определить координаты с полчаса (это был не холодный старт, который бывает очень длительным). А теперь видать санкции на нас испытывают. 5 мая как минимум с 14 часов и до 21 абсолютно не работала система GPS. По-крайней мере весь мой маршрут из тверской области до Питера GPS так и не определил координат. Отпишитесь кто 5 мая юзал GPS. У меня 2 девайса не смогли определить координаты, так что их глюк исключен.