Новинка от Mikado: VBar NEO

А зачем на голову ставить хвостовые сервы? Нет, ну серьезно?!
Хвостовая чуть быстрее и разрешение выше при сопоставимой цене.
Да и собственно “хвостовая” понятие условное. На многих сервах пишут Swash, Tail.
Не вводите людей в заблуждение, это ширина импульса центрального положения
Так это Вы пишите то “средняя точка”, то “длина импульса”.
Я же так Вам и написал “ширина импульса”, а не описанные варианты.
В других фблках есть
На брайне к примеру можно
“Другие ФБЛки” по Вашему, это разные версии Брайнов ? 😃
В Брайне, видимо, это реализовали для чудиков, чтоб было, потому и в адвансете.
Да и собственно “хвостовая” понятие условное.
Ну ХЗ, усилие 5-7кг на хвостовой и 12-25кг на голову - это не условность ни разу. 😉
А зачем на голову ставить хвостовые сервы? Нет, ну серьезно?!
Ну, очевидно, чтобы отгрести геморроев. Пока мои недоделанные эксперименты говорят о том, что слишком быстрые сервы на голове ни к чему хорошему не приведут.
Я пока предполагаю, что на голове важно отсутствие люфтов и - возможно - усилие. Нужна ли там точность - пока не понял. Не уверен в этом.
Странно то что далеко недешовая ФБЛ не дает выставить на сервах головы 760мс. На брайне к примеру можно
В брайне можно центр подстроить, но мне кажется рабочим диапазоном, который нужен для хвостовой сервы, циклик не обладает, т.е. работать она не будет.
Сколько видел фблок и ни на одной не видел возможности изменения данного параметра для головы.
Он не помер, а наоборот только начался 😃
Сейчас вопрос стал актуальным с YGE 90LV. Померял напряжение на красном проводе 5,7В. Что-то очково втыкать в сигнальный контакт НЕО. Кто нибудь так делал?
Втыкаете точно в разъем программирования?
Кстати, УГЕ должен быть не старее 4 версии. Которые старее - так не умеют
У меня 160HV v.4 подключен именно так
Напряжение не измерял, но карту программирования нужно отдельно запитывать, так что скорее всего там ноль
Втыкаете точно в разъем программирования?
Кстати, УГЕ должен быть не старее 4 версии. Которые старее - так не умеют
У меня 160HV v.4 подключен именно так
Напряжение не измерял, но карту программирования нужно отдельно запитывать, так что скорее всего там ноль
Версия мне неизвестна, купил б.у., этикетка немного потерта. Напряжение на разъеме программирования есть, потому как 90LV имеет встроенный бек.
Вероятнее всего эта фишка работает с HV OPTO
Вполне возможно, что вообще только у 160HV такая фишка прокатывает
Кстати. Для тех, кто использует микадовское крепление антенн …
Я вот такую штуку приобрел (127р, Пластик как в к-баре - колкий, зато трубки мягкие и длинные):
Я вот такую штуку приобрел (127р, Пластик как в к-баре - колкий, зато трубки мягкие и длинные):
У меня такие на всех вертах.
А у меня обычно просто висят футабовские усы как попало…
История в картинках.

На самом деле все было вчера. Воспроизвел ситуацию сегодня для снятия картинок.
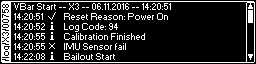
Итак. Вчера после подключения четвертого пака VBC заорал как раненый монстр и высветил на экране первую картинку. Орал секунд 10. На Neo буковка V быстро мигала красным цветом. При этом от стиков все двигалось правильно, при перемещении вертолета тарелка и хвост отрабатывали как положено. В логах было как на картинке 2 (ну не было последней строчки, о чем ниже).
Отключил и снова подключили пак. С третьей или четвертой попытки инициализация прошла. Еще раз все проверил, аккуратно взлетел, повисел, потом покрутился-покувыркался. Летит нормально. Потом отлетал по полной программе еще один пак, хотя инициализация тоже прошла не сразу. Решил, что сенсор подмерз слегка (был легкий минус), правда прошлой зимой и при -10 таких проблем не было.
Пошел домой. Попробовал снова после того, как вертолет отогрелся. Вообще не получилось проинициализировать.
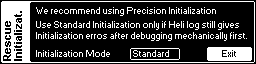
Стал гуглить. Первоe, что нашел - вот это. Все прояснилось. Навернулся тот самый сенсор, который предназначен для спасения/выравнивания. Проблема, похоже, достаточно массовая.
В качестве радикального решения раньше предлагалось просто откатиться на Pro версию, где этот сенсор не используется.
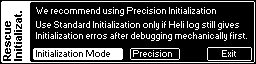
В прошивке 6.2 рекомендуется инициализировать вертолет хвостом вверх. При этом будет задействован второй альтернативный датчик. Не помогло. Оказывается, что потом альтернативная инициализация была встроена в настройки - картинки 3, 4, 5. После этого инициализация проходит успешно, только тарелка в конце дергается не один, а три раза. Ну и логах появляется два сообшения с кодом 94 и 93.
Зарядился, пошел опять на поляну, отлетал 5 паков и сегодня еще 5. Никаких проблем нет, спасалка работает и в начале полета, и в конце.
Да, по поводу последней строчки на второй картинке. Это я попробовал спасалку (в руках, естественно) при мигающем красным V. На вид все отработало как надо. Предполагаю, что оно проинициализировалось на втором сенсоре. А режим Standard в настройках просто отключает ругань на сбой первого. Standard - вот ведь как назвали, гады. Типа все нормально, а режим Precision получается уже как бы бонус.
Видно не просто так микада поставила второй дублирующий сенсор, да и еще другого производителя. Я так понял, что он менее точный и может накопиться ошибка.
Хотя, все равно неприятно. Полетаю еще, понаблюдаю. Эта ФБЛ стоит на X3, уронить, если что, не так страшно. А там буду думать - жаловаться или нет. Этот Neo был куплен в марте, время еще есть.
Алексей , писать в “редакцию” по любому надо !
…Хотя бы для профилактики , чтоб жизненный тонус не теряли .
Напишу, но хочу подготовиться. Почитаю темы типа вот этой, чтобы понимать, какие могут быть аргументы и предложения с той стороны.
Кто-нибудь знает что такое Collective Balance и как его использовать?
Для борьбы с делифином. Вот тут написано.
Adjustment for the Anti Ballooning System. Use lower values for Helis with high collective ranges and vice versa. (only with NEO available)
Для борьбы с делифином. Вот тут написано.
Не совсем так , скорее с торможением - при “смешивании” коллективного шага и циклического.
Collective Balance - это ограничение коллективного шага при большом циклическом шаге .
Вообщем фича для того, чтобы во время интенсивного 3D руления или полёта на скорость , не "смешивать"шаги и избежать срыва потока …
Можно понаблюдать как это работает и сразу станет понятно что да как :
Выкручиваем шкалу на минимум 10. Отклоняем стик элерона (элеватора) до упора и начинаем двигать стик коллективного шага , тоже до упора . Мы увидим , что тарелка по коллективу вверх-вниз перемещается с маленькой амплитудой .
Потом выкручиваем шкалу на максимум 50 . Опять отклоняем стик элерона до упора и двигаеи коллективный шаг … Тарелка двигается с большей амплитудой.
Т.е. чем больше у нас коллективный шаг , тем меньше ставим значение . Далее идем летать ,злостно раздираем ручки и смотрим как комфортнее…
"ВспуКчивание " - это звук и обычно с просадкой оборотов , который издают лопасти при смешивании обоих шагов .😃
Не совсем так , скорее с торможением - при “смешивании” коллективного шага и циклического.
Collective Balance - это ограничение коллективного шага при большом циклическом шаге .
Вообщем фича для того, чтобы во время интенсивного 3D руления или полёта на скорость , не "смешивать"шаги и избежать срыва потока …
Можно понаблюдать как это работает и сразу станет понятно что да как :
Выкручиваем шкалу на минимум 10. Отклоняем стик элерона (элеватора) до упора и начинаем двигать стик коллективного шага , тоже до упора . Мы увидим , что тарелка по коллективу вверх-вниз перемещается с маленькой амплитудой .Потом выкручиваем шкалу на максимум 50 . Опять отклоняем стик элерона до упора и двигаеи коллективный шаг … Тарелка двигается с большей амплитудой.
Т.е. чем больше у нас коллективный шаг , тем меньше ставим значение . Далее идем летать ,злостно раздираем ручки и смотрим как комфортнее…
"ВспуКчивание " - это звук и обычно с просадкой оборотов , который издают лопасти при смешивании обоих шагов .
Сколько лучше ставить %, если у меня колект. ± 13.5 и до появления этой функции все было OK?
50% если я правильно понял…
50% если я правильно понял…
чем больше у нас коллективный шаг , тем меньше ставим значение
50% по мнению Микадо, соответствует 8гр. коллектива.
Ваши 13.5гр. будут соответствовать примерно 27-30.
Вообще , конкретной цифры нет и не может быть , она может изменяться относительно разных факторов : лопасти , экспонента , падл-симуляция… моторики пальцев рук в конце концов .