Да я искал, но не нашёл. Спасибо за ссылку. То что надо!
То что мне попадались gps - либо уже шли с последней прошивкой, либо их нельзя было прошить из-за косяков со стороны китайцев. И вроде как ардупилот может сам конфигурировать gps при старте. Так что можно в самом арду поковырятся.
Даже ковыряться необязательно, тот конфиг, что заливает ardupilot при каждом включении вполне вменяемый.
Прошивку обновлять в М8Н тоже смысла нет.
Короче, со всех сторон засада. )))))
Короче, со всех сторон засада. )))))
Да я и подключиться через МП не смог… 😃
А в чём сложность подключиться через юсб-юарт?
А в чём сложность подключиться через юсб-юарт?
Снимать, разбирать, другой разьём, и.т.д и.т.п.
А в чём сложность подключиться через юсб-юарт?
Лень - двигатель прогресса.
Лень - двигатель прогресса.
Это точно.
Параметр GPS_NAVFILTER у кого какой стоит? По умолчанию 8. Но по описанию, для самолёта вполне подходит и 7. Однозначного ответа в гугле не нашёл.
все дефолт стоит. Имхо не нужно ничего менять если стандартный аппарат
Единственное что заметил, на айнаве конфиг лучше, чем на арду загружает в gps. И спутники быстрее ловятся и количество спутников на айнаве больше.
А так по умолчанию нормально с gps летают пепелацы.
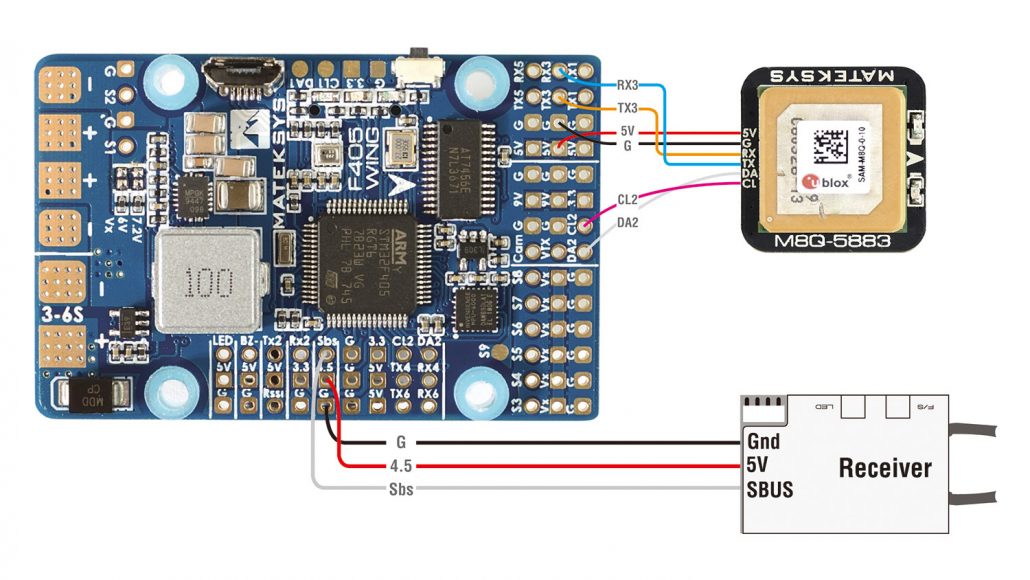
Подскажите, тут на картинке GPS идёт в гребенку где контакты под сервы
Но под Айнав паяется в гребенку рядом с приёмником.
При этом в параметрах есть такой выбор: Default UART order
SERIAL3 = GPS1 = USART3
SERIAL4 = GPS2 = UART4
Так можно GPS с Арду паять на TX/RX 4 рядом с приёмником?
И ещё, если ставлю не Айнав а Арду, то не смогу с пульта управлять видеопередатчиком по Трампу/Смараудио?
Но под Айнав паяется в гребенку рядом с приёмником.
Чего?
При этом в параметрах есть такой выбор:
Default UART order
SERIAL3 = GPS1 = USART3
SERIAL4 = GPS2 = UART4
Так можно GPS с Арду паять на TX/RX 4 рядом с приёмником?
Какая разница к какому UART паять gps? В настройках арду поменяете
Если у вас sbus, то приемник лучше паять к sbus на полетнике, другие к Rx2 или согласно картинке.
GPS можно паять на любой uart, желательно кроме uart2
По умолчанию арду настроен как написано на сайте матека, но вам никто не мешает подключать как вам угодно и настраивать как вам нужно.
И ещё, если ставлю не Айнав а Арду, то не смогу с пульта управлять видеопередатчиком по Трампу/Смараудио?
В релизных версиях пока нету поддержки трампа/смартаудио, если не путаю, но вроде как должны когда-то добавить
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"498d56003df95500777722c8":{"_id":"498d56003df95500777722c8","hid":43860,"name":"suris2009","nick":"suris2009","avatar_id":null,"css":""},"4c0957443df9550077760211":{"_id":"4c0957443df9550077760211","hid":67065,"name":"Shuricus","nick":"Shuricus","avatar_id":null,"css":""},"4cc45ac23df955007775ad37":{"_id":"4cc45ac23df955007775ad37","hid":73809,"name":"Dok555","nick":"Dok555","avatar_id":null,"css":""},"4cffdb733df9550077758f84":{"_id":"4cffdb733df9550077758f84","hid":76166,"name":"alepavlenko","nick":"alepavlenko","avatar_id":null,"css":""},"510750493df955007773ad72":{"_id":"510750493df955007773ad72","hid":135512,"name":"schs","nick":"schs","avatar_id":null,"css":""},"526276cf3df9550077730fc0":{"_id":"526276cf3df9550077730fc0","hid":179522,"name":"Hyperion","nick":"Hyperion","avatar_id":null,"css":""},"5469d13d3df9550077723996":{"_id":"5469d13d3df9550077723996","hid":211369,"name":"kasatka60","nick":"kasatka60","avatar_id":null,"css":""},"552d07dc3df955007771e6c6":{"_id":"552d07dc3df955007771e6c6","hid":222013,"name":"khomyakk","nick":"khomyakk","avatar_id":null,"css":""},"5788e1693df955007770f512":{"_id":"5788e1693df955007770f512","hid":253756,"name":"nox007","nick":"nox007","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb5186","hid":90,"title":"Полёты по камере, телеметрия","parent":"61c9a54c3df9550077bb50fc","description":"Бортовые видеокамеры, передатчики видео, видеоочки, обсуждение полётов по камере.","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":3154,"post_count":433372,"last_post":"691cf63feede43b1c4f9900b","last_topic":"635e349add64ea9bf5338593","last_topic_hid":571586,"last_topic_title":"Выбор цифровой FPV","last_ts":"2025-11-18T22:42:07.190Z","last_user":"5469d13d3df9550077723996"}},"topic":{"_id":"49a92dab3df95500779ea21f","hid":132831,"title":"Автопилот Arduplane - открытое ПО","views_count":1357596,"last_post_counter":17455,"cache":{"post_count":17300,"first_post":"49a92dab3df95500779eaf1b","first_ts":"2009-02-28T12:27:23.000Z","first_user":"3ea929d03df955007779662a","last_post":"66d052ee6371a12da9fb1647","last_post_hid":17455,"last_ts":"2024-08-29T10:52:30.369Z","last_user":"528900583df955007772fba7"},"st":1,"section":"61c9a54c3df9550077bb5186"},"subscription":null,"pagination":{"total":17300,"per_page":25,"chunk_offset":16191},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}