Автопилот Arduplane - открытое ПО

Из мануала (раздел Plane Failsafe Function) цитата: Если диапазон действия телеметрии превышает диапазон RC-передатчика, то может потребоваться предотвратить потерю RC-сигнала от инициирования отказоустойчивости. Использование вышеупомянутого отказоустойчивого GCS будет затем использоваться для обеспечения отказоустойчивой защиты. Чтобы система RC не мешала работе GCS, установите THR_FAILSAFE = 2. Это предотвращает отказоустойчивое действие RC, но по-прежнему обнаруживает отказоустойчивое состояние и игнорирует входы RC. Конец цитаты. Т.е. если подходить ответственно к последствиям безконтрольного полёта беспилотника – установить THR_FAILSAFE = 2 позволив лететь по миссии, но при хорошей связи с наземной станцией, если самолёт при выполнении миссии вылетит из диапазона действия наземной станции то выполнить мероприятия из Advanced Failsafe Configuration с целью обеспечения безопасности воздушного пространства. Считаю, что нельзя допускать полёта по миссии в слепую с надеждой что он вырулит в правильном направлении. Однако я использую RFD868, в котором канал радиоуправления идёт вместе с телеметрией, так потеря RC произойдёт одновременно с телеметрией, поэтому рационально сразу RTL , парашют или цитата: для преднамеренного крушения самолета, если существует какой-либо риск того, что он может вылететь за пределы области воздушного пространства, определенной географической границей и максимальной высотой. Я это к тому чтоб не было случаев, которые повлияют на законодателей запретить наше хобби и вы в ответе за последствия.
братцы подскажите, не пойму что не включил. матек 765 WSE , пищит регуль не видит сигнала настройки SERVO1_FUNCTION 33 во вкладке САЛИБРОВКА РАДИО тротл движется от 1000 до 2000 на ОСД индикатор газа показывает что при отклонении стика газ добавляется 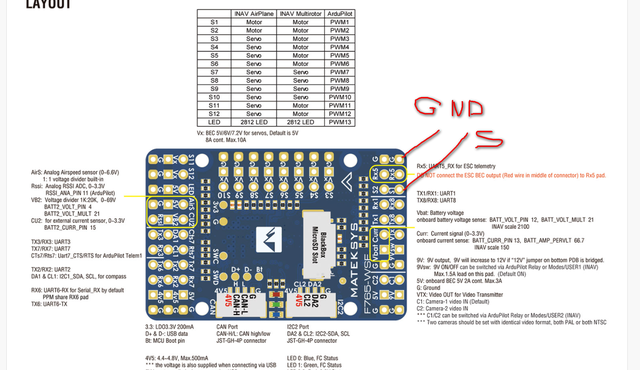
не быстро но дошло, должно быть Тротле а не мотор1 )
Добрый день, друзья!
Сегодня немного полетал и уже на посадке, когда высота достигла 45 м произошёл скачок высоты вверх на 140 м и osd стало показывать 200 м, так что я садился уже на высоте 155 м, судя по приборам. Прошивка 4.0.9. Не знаете, что это было?
Это была абсолютная высота места над уровнем моря. Я это видел уже…
так так же не должно быть…
непонятно, стоит TRIM_THROTTLE 65 , крыло в режиме РТЛ газует до 80 % когда кружит над точкой взлета, разгоняется еще сильнее, до 100%
логи давайте)
логи давайте)
написал в личку
непонятно, стоит TRIM_THROTTLE 65 , крыло в режиме РТЛ газует до 80 % когда кружит над точкой взлета, разгоняется еще сильнее, до 100%
С подключенным или нет датчиком воздушной скорости?
на крыле нет датчика,
добвлю; стоял матек с прошивкой 4,09 было то же самое.
сейчас матек 465 с прошивкой 4,1 стаб, результат аналогичный
По характеру поведения стоит возможность автопилота управлять газом и высокая минимальная скорость. У меня было такое, но с точностью до наоборот. Т е при возврате домой, газ падал до сваливания. Причина была в неточных показаниях датчика воздушного давления и очень маленькой для данного самолета минимальной скорости. Причина разгона в точке ДОМ - при вращении по кругу скорость по GPS меньше фактической, причем чем меньше круг, тем отличия больше. Вот и поднимает автопилот газ. Я и спросил про датчик ПВД поэтому. Где то в настройках минимальной - максимальной скорости в авторежимах и настройках газа при авторежимах рыться надо. Прошивка видимо не при чем тут.
Причина была в неточных показаниях датчика воздушного давления и очень маленькой для данного самолета минимальной скорости. Причина разгона в точке ДОМ - при вращении по кругу скорость по GPS меньше фактической, причем чем меньше круг, тем отличия больше. Где то в настройках минимальной - максимальной скорости в авторежимах и настройках газа при авторежимах рыться надо. Прошивка видимо не при чем тут.
круг увеличил до 150 метров, скорость немного упала, но все равно разгоняет до 130 км. многовато
Херасе у Вас аппарат! У меня 70 км/ч при газе в пол. Один раз до 80, но в пикировании. Смотрите , что настройках газа указано. И там есть еще такая хрень, как дать возможность на сколько процентов менять автопилоту газ. Вот не помню пункт точно. А чему равно значение у Вас ARSPD_FBW_MIN? Т е насколько он соответствует нормальному полету? Он должен процентов на 15-20 выше скорости сваливания. Вот я думаю, что у Вас он завышен. Как показали мои тесты, это значение влияет на скорость возврата домой, т е на скорость в режиме RTL.
У меня 70 км/ч
наверное у нас ЛА под разные задачи.
Как бы криминального ничего нет
ARSPD_FBW_MIN 9 м\с около 30 км /ч
ARSPD_FBW_MAX 22 ---------80 км/ч
TRIM_ARSPD_CM 1200 см / с
TRIM_THROTTLE 65
можно поглядеть после 11 минуты
Ну как я понял Вы там сами летаете в режиме FBWA с газом 65% примерно. Это 90 там с хвостиком км/ч . Далее включаете RTL и полетник летит домой с тем же газом примерно и скоростью. По прилету к дому самолет начинает крутиться и добавляет примерно 10% газа по умолчанию чтобы не свалится. Это как раз уже за 100 км/ч. Вот это я вижу вроде. Может ошибаюсь?
TRIM_ARSPD_CM 1200
TRIM_THROTTLE 65
Мои предположения:
Самолет летит при данном уровне газа со скоростью 25-27 м\с. Следовательно надо либо поднимать TRIM_ARSPD_CM до 25-27 либо понижать TRIM_THROTTLE до 40-45 (разумеется если самолет способен летать со скоростью 12м\с без сваливания). Точную величину сложно сказать так как в полете нету момента где долгое время скорость была в районе 12м\с.
Вопрос: есть ли какой-то способ в arduplane тумблером отключать\включать GPS в полёте?
Выход шим сделать relay. Им по en входу отключать дсдс питающий gps.
Столкнулся с очень интересной проблемой на Пиксе с датчиком воздушной скорости. Суть проблемы состоит в том, что датчик воздушной скорости показывает скорость примерно в 1,7- 1,5 раза меньше реальной скорости по GPS. Причем , если попытаться сделать автокалибровку датчика , то коэффициент ARSPD_RATIO примерно 4 становится. ( Если вручную по логам считать, то тоже где то так получается.) Что явно выше верхнего предела, который лежит , где то в пределах 3,2. Система герметична, проверялась под водой, менялась раза три. Неисправность датчика исключена - у меня их 3 шт, 2 аналоговых и один цифровой. Их показания совершенно идентичны. Неисправность полетника тоже исключена. Недавно заменил на другую модель - показания точно такие же. Трубка Пито стоит в носу самолета, завихрения и затенения - исключены. Показания воздушного датчика естественно повторяют показания датчика GPS , но с меньшими значениями. Вот вопрос - как с этим жить то?
Роман, у меня ровно такая же фигня творится!
Перепробовал разные датчики и трубки, калибровал калибровал, да не выкалибровал. Коэффициент становится =4, но даже при этом воздушная скорость неадекватно низкая отображается.
(АП = Matek F765 Wing)
Я так и не победил, забил, отключил датчик воздушной скорости, летаю без него пока.
Если вы разберетесь, отпишитесь пожалуйста КАК!
Вопрос: есть ли какой-то способ в arduplane тумблером отключать\включать GPS в полёте?
Нашел по наводке Константина:
ardupilot.org/…/common-auxiliary-functions.html
RCx_OPTION value = 65
Simulates GPS failure by disabling GPS.