Автопилот Arduplane - открытое ПО

В мишин планере есть возможность цепляться по UDP или TCP, IP спрашивает при попытке коннекта.
В МП - ладно, а вот сама платка АПМ, если я правильно понял, не ведает пока, что такое IP и с чем его едят. А если бы ведала - то как узнать ее IP, особливо, если связь прервалась, и модем переконнектился? Не припомню я случая, чтобы опсосы раздавали по GPRS фиксированные айпишники клиентам 😃 Так что IP - в топку. Благо, если эта платка позволяет на нее дозвониться и по полученному каналу передать-получить инфу как через радиомодем на 433 МГц. Дорого, но железо дороже.
О какую офигительную вещь нашел!
Или все уже видели?
имеется ввиду обычную крутилку приспособить? была такая идея, но она свободно крутится. вот если бы положения фиксировались…
вот если бы положения фиксировались…
Есть и такие. Вопрос решается подбором сопротивлений на контакты переключателя. Ставится заместо одной из крутилок. Видел подобное у кого то в дневнике
имеется ввиду обычную крутилку приспособить? была такая идея, но она свободно крутится. вот если бы положения фиксировались…
Как вы видите, она тут именно фиксируются. На картинку не пробовали нажать?
Есть и такие. Вопрос решается подбором сопротивлений на контакты переключателя. Ставится заместо одной из крутилок. Видел подобное у кого то в дневнике
Приятно, что это уже готовый набор в продаже.
Приятно, что это уже готовый набор в продаже.
Не вижу никаких сложностей, в том чтоб потратить 30 минут времени на подбор сопротивлений. Главное переключатель подходящий найти
Вот здесь все расписано
diydrones.com/…/6-position-mode-switch-for-apm
Народ, подскажите есть 3шт APM 2.5 (heli, planer, quadro), и не одна не видит GPS. Модуль LEA-6H, брал с DX, с настройками не заморачивался, всё само работало. Сейчас собрал, чтобы проверить с Ardustation, а спутники не ловит. Подключил по UART, видится на 9600, текст бежит, корректен. Попробовал залить конфиг через u-blox, ругается мол конфиг под другую версию прошивки, в конце выдаёт ошибки и не дошивает. На свой конфиг реагирует точно также. Тупо поменял скорость на 38600 (вроде так), ну и периодичность пакетов 200мс. Всё равно APM не видит. Подскажите. Я очень сомневаюсь что сразу на трёх APM сдох порт, но и с другой стороны GPS в принципе рабочий, выдаёт корректную информацию. Шнур исправен.
в терминале, в тесте выдаёт “…” (2E).
Кто какой повер-модуль использует? А то их что то много всяких видов. С беком и без, на разные токи и напряжения, по комплектующим. Какой проверенный?
Удалил
Кто какой повер-модуль использует? А то их что то много всяких видов. С беком и без, на разные токи и напряжения, по комплектующим. Какой проверенный?
обзорчик юбеков для АПМ 2 и выше
rcopen.com/blogs/99365/17219
(запись в дневнике по ошибке давно лежала в черновиках)
Алексей, спасибо - очень полезная информация!
Хочу сделать правильное питание, как на нижней схеме. Но беков на 6.28 вольт не встречал.
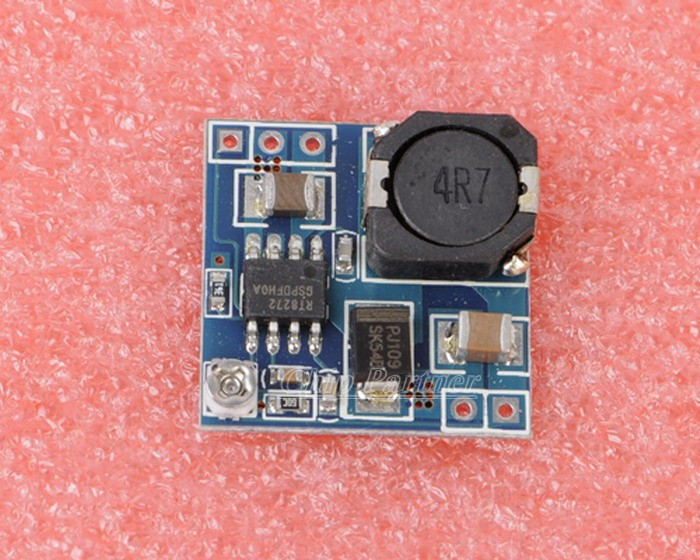
Какой лучше использовать для этих целей ДС-ДС? Вижу варианты:
Rectification: non-synchronous rectification
Input voltage: 4.75V-24V
Output voltage: 0.92V-15V
Output Current: 2A (maximum)
Conversion efficiency: 95% (the highest)
Switching frequency: 1.2MHz
Output ripple: 30mV (max)
Load Regulation: ± 0.5%
Voltage Regulation: ± 2.5%
Input voltage: 4V-35V
Output voltage: 1.23V-30V
Input current: 3A(maximum)
Conversion efficiency: 92%(highest)
Switching frequency: 150KHz
Output ripple: 30mA9maxmum)
Load regulation: ±0.5%Voltage regulation: ±2.5%

2596 рулез, (правда большеват)
вот прототипчик на нем

заказал заводские платки под “серию”
А что выбрать из этого:
goodluckbuy.com/apm-apm2-6-power-module-voltage-cu…
goodluckbuy.com/apm-power-module-with-xt60-connect…
goodluckbuy.com/apm-arduflyer-power-module-v1-0-vi…
www.rctimer.com/product_861.html
Или еще что то есть?
Первая ссылка не работает.
Кстати по питанию у них есть модуль на 5.4В
Вот этот уже с беком на 5.3В goodluckbuy.com/apm-arduflyer-power-module-v1-0-vi…
мужики, обратите внимание, питать в штатный разъем повермодуля напряжением 5,3 - это плохое решение.
проходя через диод и предохранитель должно потеряться 0,3 вольта… но дефакто получается нестабилизированные 5 вольт.
сомнительна полезность предохранителя - что он должен предохранить? если замыкание или перегрузка в полете приведет к обесточке то собрав дрова с поля будешь держать в руке спасенный от перегрузки повермодуль и тащиться от его спасения?
единственный способ обеспечить ХОРОШЕЕ питание подавать ровно 5 в цепь питания (центральный пин входов радиоприемника или входов боковой планки, кроме последних двух пар вблизи USB-)
зы на моей фотке трехконтактный штыревой разъем идет в то место где у апм 2.5 гнездо повермодуля, но у меня модернизированная плата, я убрал всю эту чушь диод, предохранитель и 5 контактный разъем и поставил обычный 2,54мм штыревой 3 контактный который напрямую питает проц
Т.е. убираем (соединяем напрямую) диод и предохранитель и можно питаться от разъема повермодуля?
Т.е. убираем (соединяем напрямую) диод и предохранитель и можно питаться от разъема повермодуля?
если туда подключить ровно 5.0V от БП собственной конструкции то да
оригинальный выдает 5,3 и обладает обратным потреблением, поэтому при использовании оригинального повермодуля - нельзя
я долго размышлял почему дидронесы выбрали такое убогое решение как диод и предохранитель, нигде в микропроцессорной технике не развязывают стабилизированное питание таким образом - если ставят диод и предохранитель то ДО регулятора напряжения. Предположение такое что после того как сделали апм 2 - придумали повермодуль, в ходе тестов оказалось что он страдает обратным потреблением и влепили диод чтобы он не сгорал при питании от юсб, после диода оказалась просадка в 0,3 вольта, чтобы устранить ее подняли напряжение на выходе юбека, чтобы юбек не сгорал при замыкании и не попадать на гарантию - влепили самовосстанавливающийся предохранитель. это единственное объяснение этого бреда.
если после 6,2- 6,3 вольтового юбека ставть LDO то получаем все ништяки чистые 5,0 вольт защиту от сгорания при замыканиях, предотвращение обратного потребления
Подскажите в чем проблема
Гексакоптер с платкой AIOP v2 на MegapirateNG
Регули 20A SimonK c RCTimer
Бэка нет, запитываю через бэк регулей
Когда летаю в спокойном режиме - всё отлично
Когда даю полный газ - отрубаются движки, гекса падает, что бы опять заработала - только отключить и включить аккум обратно помогает
Если к земле прижать и не дать взлететь и так-же дать полный газ - тоже самое
В чём может быть проблема?
Произвёл эксперимент, подключил GPS порт APM к компу.
APM на разных скоростях пытается законфигурить GPS, и просит перейти на текст при скорости 38400
$PUBX,41,1,0003,0001,38400,0*26
забиваем и шлём мусор дальше на 9600.
На пакеты (см. ниже), APM реагирует, меняя статус на No FIX, при отсутствии пакета более 3 секунд выдаёт No GPS. На карте не показывает.
$GPRMC,114702.624,V,0208.017,S,09700.725,W,98.2,40.33,070114,E*69
$GPGGA,114703.624,0208.017,S,09700.725,W,0,00,M,M,*4E
$GPGLL,0208.017,S,09700.725,W,114704.624,V*29
$GPVTG,40.33,T,M,98.2,N,181.8,K*57
А вот если дослать этих пакеты (см. ниже), APM изменит статус на 3D FIX, и тут же показывает место на карте. Но если после 3D Fix прекратить посылать пакеты, то APM этого не заметит, будет дрейфовать по карте.
$GPGSV,5,1,19,03,57,228,54,06,56,204,50,11,06,288,31,14,13,161,44*7C
$GPGSV,5,2,19,15,22,042,01,16,12,225,40,18,57,076,51,19,50,291,26*7D
$GPGSV,5,3,19,21,32,102,48,22,69,188,48,65,42,046,01,66,75,189,43*7B
$GPGSV,5,4,19,73,14,332,15,74,16,022,25,81,76,173,42,82,43,314,14*71
$GPGSV,5,5,19,88,21,147,40,33,11,238,40,37,25,199,39*41
$GPGGA,125653.000,5544.55880,N,03731.40897,E,1,11,1.4,168.2,M,M,*48
$GPRMC,125653.000,A,5544.55880,N,03731.40897,E,000.0,000.0,141111,A*69
$GPGSA,A,3,3,6,14,16,18,19,21,22,66,81,88,1.4,1.6*12
$PORZD,A,12.3*0C
Из этого вывод, вход GPS может работать на разных скоростях, на 4800, 9600, 38400, 57600 работает 100% (arduplane). Вопрос только в формате.
Гексакоптер с платкой AIOP v2 на MegapirateNG
Логичнее в теме про АИОП или мегапирата спрашивать.