Автопилот Arduplane - открытое ПО

да, в итоге сделаю PR и вроде как автор не против доп интеграции с ардупилотом.
С координатами да, проблем не было. Но прога не хотела их отображать как как слишком мало пакетов расшифровывалось.
По поводу карты OSM. Честно я понятия не имею как это сделать. Там видимо придется другого провайдера карт использовать, потому что сейчас все завязано на гугл картах. Да и в программе же можно выбирать спутник\гибридную карту.
Спутник и гибрид “в поле на солнце” куда менее стабильны чем осм-схема. Но главная причина - на гугле не обозначены “запретки”, а на осм они есть.
Пока добились такого полета на Сонике ар Винг 900мм, ещё пиды по питч покрутить немного, и норм будет. Для понимания, это полет в приличный ветер, порывы до 8 м.с.
а как пиды крутить на самолете? На коптере можно было на крутилку выносить? А тут я что то не вижу таких настроек.
а как пиды крутить на самолете? На коптере можно было на крутилку выносить? А тут я что то не вижу таких настроек.
только руками на земле из параметров. или автотьюн
А по линку модемами? Да, летать рядом придется.
а как пиды крутить на самолете?
короч сам спросил сам ответил 😃
ardupilot.org/…/common-transmitter-tuning.html
Можно, но все настраивается через Full parameter list
А по линку модемами? Да, летать рядом придется.
Только ESP-01 имеется. Боюсь на 500-600м она не добьет.
Автотюн не помог? На классике работает прекрасно.
Да в целом было неплохо на сток сервах. Сейчас их заменил, на Emax, и кажется стало сильнее его подергивать. ХЗ к чему стремится на логах. На коптерах вроде все понятно было. А тут крыло…
Вообщем такие сейчас графики ролл и питч
 pitch by Aleksey Degtyarev, on Flickr
pitch by Aleksey Degtyarev, on Flickr
 roll by Aleksey Degtyarev, on Flickr
roll by Aleksey Degtyarev, on Flickr
и такие пиды. Крыло dart250g
 pid by Aleksey Degtyarev, on Flickr
pid by Aleksey Degtyarev, on Flickr
PIDы после автотюна на сток сервах. D по питчу понизил до 0.02. Автотюн выставил что то около 0.024. При полете навстречу ветру были приличные осциляции. Когда убавил D до 0.02 вроде они пропали. Но не нравятся вот эти дергания. Думаю автотюн еще раз прогнать. Вручную тюнить конечно нудно… Выставил параметр, оттюнил, посадил сменил, и так минимум 6 раз…
Ура, сработало! Теперь Ардупилот заработал на Таранисе. FrSky Telemetry на Ардупилот тестирование. Yaapu Frsky Telemetry for ARDUPLANE 2020 0523
Установка телеметрии на передатчик Taranis 7Q по проекту Yaapu Frsky Telemetry Script ( я использовал последнюю Script version 1.8.0) ссылка: github.com/yaapu/FrskyTelemetryScript . Порядок установки скрипта на SD карточку ссылка тут: github.com/…/Installation-on-Taranis-radios . Описание и установка параметров телеметрии для ARDUPILOT ссылка: ardupilot.org/…/common-frsky-telemetry.html#common… .
Скрипт тестировал на модуле R9M FLEX FCC и полётном контроллере ПК Matek 765 WING и передатчик Taranis 7Q FW 2.3.5 Open TX. Для соединения с портом Sport приёмника R9 изготовил инвертор (адаптер) на транзисторах BC547 , для получения уровней сигналов на Rx Tx 3,3 В применил линейный регулятор LOW DROPOUT VOLTAGE REGULATORS LM2950 3,3 V. Схема:
Установочные параметры в ПК Matek 765 WING (UART 1 для Matek соответствует SERIAL2 ARDUPILOT) :
SERIAL2_PROTOCOL 10 FrSky SPort Passthrough (OpenTX)
SERIAL2_BAUD 57
Питание инвертора от Sport приёмника R9, выходы адаптера Rx к Rx1, Tx к Tx1, GND к GND полётного контроллера Matek 765.
Однако можно не паять инвертор на транзисторах если имеется приёмник с non-inverted (hacked) S.Port signal в этом случае такие параметры настройки телеметрии:
• TX4 pad
• SERIAL2_BAUD 57
• SERIAL2_OPTIONS 7
• SERIAL2_PROTOCOL 4
В планах развития этого проекта Frsky bidirectional telemetry implementation появится возможность с передатчика настроить пиды discuss.ardupilot.org/t/…/74
Теперь Ардупилот заработал на Таранисе.
Да он как бы очень давно работает. Или это лично у вас?
SERIAL2_PROTOCOL 4
А зачем такие странности, если есть протокол FrSky SPort Passthrough (10), который прекрасно работает с Yaapu Frsky Telemetry Script?
Но инвертор SPort нужен, да - если приёмник не r9mm или r9 slim+
Да он как бы очень давно работает. Или это лично у вас?
А зачем такие странности, если есть протокол FrSky SPort Passthrough (10), который прекрасно работает с Yaapu Frsky Telemetry Script?
Но инвертор SPort нужен, да - если приёмник не r9mm или r9 slim+
Это я сделал для начинающих, которые думают переходить с Айнав на Арду, а привычка иметь телеметрию на передатчике томозит процесс перехода. Мне такая функция не нужна по причине плохой видимости, малой информативности, имеется более надёжный канал (отдельный) телеметрии, а вот на Айнаве пользуюсь потому что планировщик полётов там не достаточно продвинутый.
Мне такая функция не нужна по причине плохой видимости, малой информативности
“Видимость” информации на скрипте при FPV-полётах не нужна (её OSD дублирует), а вот голосовые сообщения скрипта о режимах, остатке заряда аккумлятора и т.п - очень даже удобны.
Ура, сработало! Теперь Ардупилот заработал на Таранисе.
дальше читать не стал… уж извините…
дальше читать не стал… уж извините…
Если до конца не дочитали зачем про это писать автору? И почему думаете, что Ваше мнение чего-то стоит? Форум создан для обмена полезной информацией, оказанию технической помощи и о достижениях в хобби. Пишите на форуме полезную информацию в соответствии с её правилами.
Я думаю затем что должна быть элементарная грамотность.
Ардупилот никак не может заработать на Таранисе.
Я думаю затем что должна быть элементарная грамотность.
Ардупилот никак не может заработать на Таранисе.
ArduPilot provides a comprehensive suite of tools suitablefor almost any vehicle and application.
ArduPilot предоставляет полный набор инструментов, подходящих практически для любого транспортного средства и приложения. ardupilot.org/ardupilot/index.html Ардупилот обеспечил работу инструмента Yaapu Frsky Telemetry Script на Таранисе - теперь правильно? А под Айнав Yaapu Frsky Telemetry Script заработает. Давайте прекратим эту бесполезную дискуссию. Кто бы полезное добавил, например как сделать чтоб без инвертора заработало
“Видимость” информации на скрипте при FPV-полётах не нужна (её OSD дублирует), а вот голосовые сообщения скрипта о режимах, остатке заряда аккумлятора и т.п - очень даже удобны.
Согласен с Вами, голосовые сообщения очень удобно. А как включить озвучку вариометра на передатчике, а так приходится пользоваться Миссион Планером там эта функция имеется, я её использую для поиска восходящих потоков на планере.
Озвучка вариометра включается на экране телеметрии - не скрипта, а именно телеметрии в профиле модели. Требуется “понятная опентх” вертикальная скорость в составе данных, приходящих по телеметрии.
Озвучка вариометра включается на экране телеметрии - не скрипта, а именно телеметрии в профиле модели. Требуется “понятная опентх” вертикальная скорость в составе данных, приходящих по телеметрии.
Эта озвучка работает у Вас? Как это сделать объясните подробнее, очень нужно сейчас чтобы не брать в поле компьютер.
Я думаю затем что должна быть элементарная грамотность.
Ардупилот никак не может заработать на Таранисе.
+1 а еще с криками ура… эгегей… наконец-то!!! накогда такого не было и вот опять!!! )))
Для соединения с портом Sport приёмника R9 изготовил инвертор (адаптер) на транзисторах BC547 , для получения уровней сигналов на Rx Tx 3,3 В применил линейный регулятор LOW DROPOUT VOLTAGE REGULATORS LM2950 3,3 V.
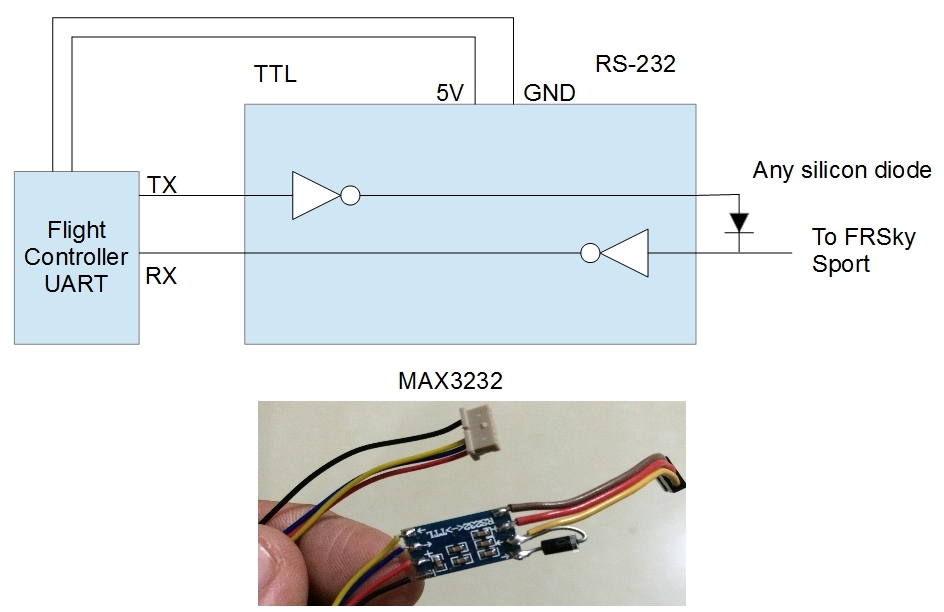
оставлю это здесь… катинка из вашей же приведенной ссылки… а вы подумайте, насколько корректно подобные преобразователи называть инверторами, адаптерами и так далее… вы меня извините конечно… ничего личного, я и видео ваши смотрю, и лайки иногда ставлю. но в профильных сообществах принято разговаривать на общепонятных технически грамотных языках… и раз уж такое мое “мнение чего-то стоит” вопрос для вас, то “для чего весь этот цирк” в который превращается данная дискуссия…
+1 а еще с криками ура… эгегей… наконец-то!!! накогда такого не было и вот опять!!! )))
оставлю это здесь… катинка из вашей же приведенной ссылки… а вы подумайте, насколько корректно подобные преобразователи называть инверторами, адаптерами и так далее… вы меня извините конечно… ничего личного, я и видео ваши смотрю, и лайки иногда ставлю. но в профильных сообществах принято разговаривать на общепонятных технически грамотных языках… и раз уж такое мое “мнение чего-то стоит” вопрос для вас, то “для чего весь этот цирк” в который превращается данная дискуссия…
Инвертированный сигнал это из понятия FrSKY они так обозвали сигнал с S-Port, то что Вы показали схему на MAX3232 это я даже рассматривать не стал так как там уровни сигналов стандарта RS232 это совсемь не годится. Можно даже не паять ничего так как телеметрия идёт вк передатчику, потому что с перелатчика не идёт никакой информации, т.е. нет возможности менять какие-либо параметры. О понятиях договариваются, для некоторых понятий существуют стандарты - их надо соблюдать, а Гра́мотность — степень владения человеком навыками чтения и письма на родном языке. Традиционно под словом «грамотный» подразумевают человека, умеющего читать и писать, или только читать на каком-либо языке.
А как объяснить правильность понятий производителям aliexpress.ru/item/32956111865.html?spm=a2g0o.prod…_ и этому форуму discuss.ardupilot.org/t/…/27613
В приведённой ссылке на инвертор с Али там установлена микросхема 74HC04 - Hex inverter или SN 74LVC2GU04 device contains two inverters
Александр, в любом случае все мы рады что у вас наконец-то -
Ура, сработало! Теперь Ардупилот заработал на Таранисе.
Как это сделать объясните подробнее
Открыть в аппе “страничку” телеметрии в профиле модели и почитать надписи - там нагляднее табуретки.
ХЗ к чему стремится на логах. На коптерах вроде все понятно было. А тут крыло…
А к чему вы стремились в логах для коптера? Закон работы ПИД никто не менял.